目录
文章目录
摘要
本节主要讲解waf,waf 是一个帮助构建和编译系统的框架,采用python语言编写。欢迎批评指正!!!
分析要点:
1.ardupilot为何使用waf编译,而不使用make?
2.ardupilot如何进行代码编译,下载?
3.为何我输入一个命令,ubuntu会不停的回显编译的进度?
1.ardupilot为何使用waf编译,而不使用make?
官网原话:
Ardupilot is gradually moving from the make-based build system to
[Waf](https://waf.io/). The instructions below should be enough for you to
build Ardupilot, but you can also read more about the build system in the
[Waf Book](https://waf.io/book/).
Waf should always be called from the ardupilot's root directory. Differently
from the make-based build, with Waf there's a configure step to choose the
board to be used (default is `sitl`).
中文翻译:Ardupilot正逐渐的从make编译系统改成采用waf:https://waf.io 进行系统的编译。下面的指导说明:足够为你编译Ardupilot代码,当然如果你想要了解更多的关于系统编译,建议你看[WAF book],网址是:https://waf.io/book/
waf的调用总 是在ardupilot代码的根目录,跟make编译系统不一样,waf的使用需要有一个配置步骤来选择要使用的飞控板(默认配置为“SITL”)也就是默认是配置的是仿真板。
2.ardupilot如何进行代码编译,下载?
1.编译代码
./waf configure --board fmuv5 //这个是编译pixhawk_v5
./waf configure --board px4-v2 //这个是编译pixhawk
2.下载代码
./waf --targets bin/arducopter --upload
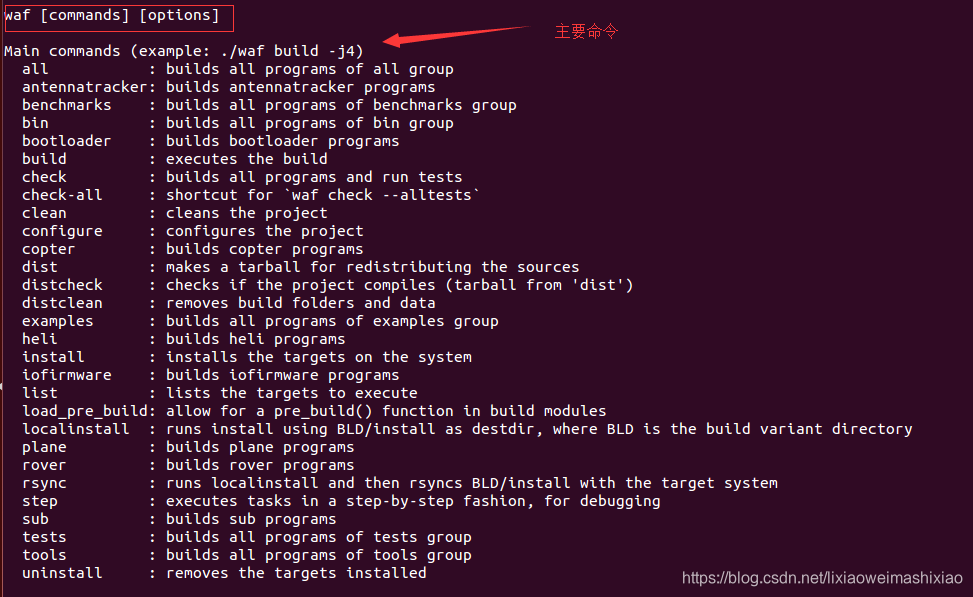
3 ./waf --help帮助命令

3.采用make进行编译
1.make编译
$: cd 切换代码ardupilot目录
$: cd ArduCopter
$: make px4-v2
2.make下载
make px4-v2-upload
3.输入命令,回显是什么内容
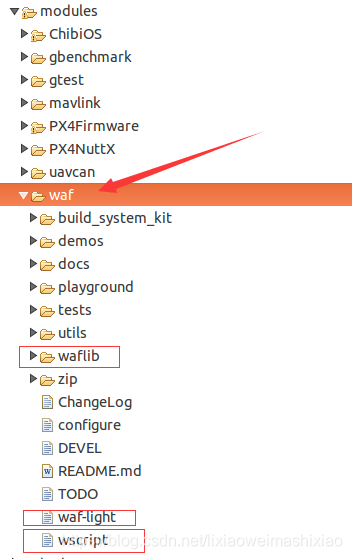
ardupilot的每个设备层都有一个支持python语言的waf脚本。并且总的目录下面仍有一个wscript脚本。总目录的脚本调用每个设备层下的脚本对飞控代码进行整体的编译,生成机器可以识别的语言。
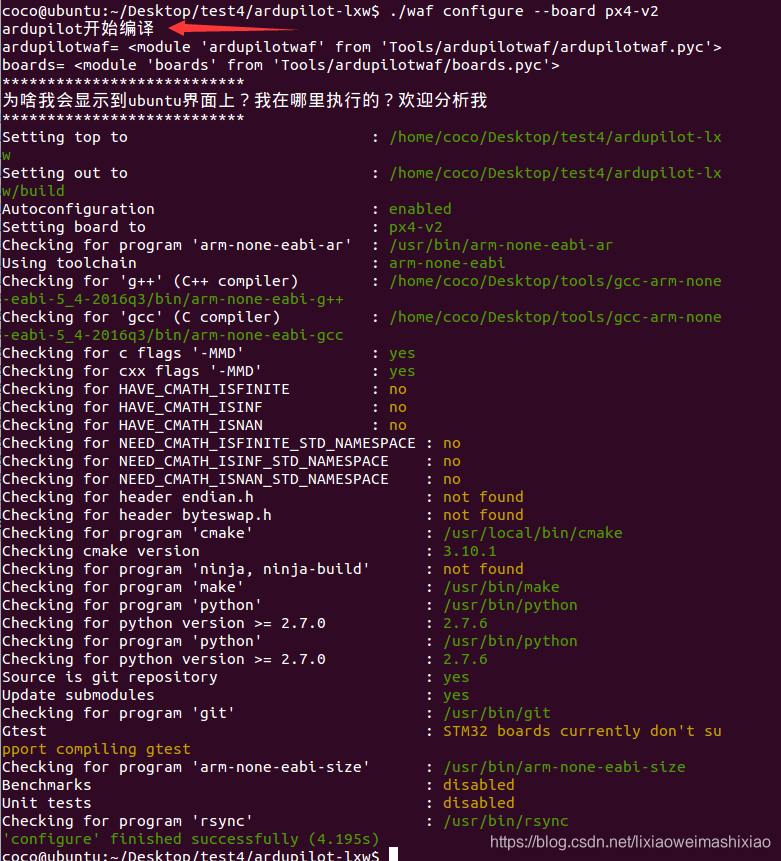
当我们执行
./waf configure --board fmuv5
ubuntu的终端显示内容:
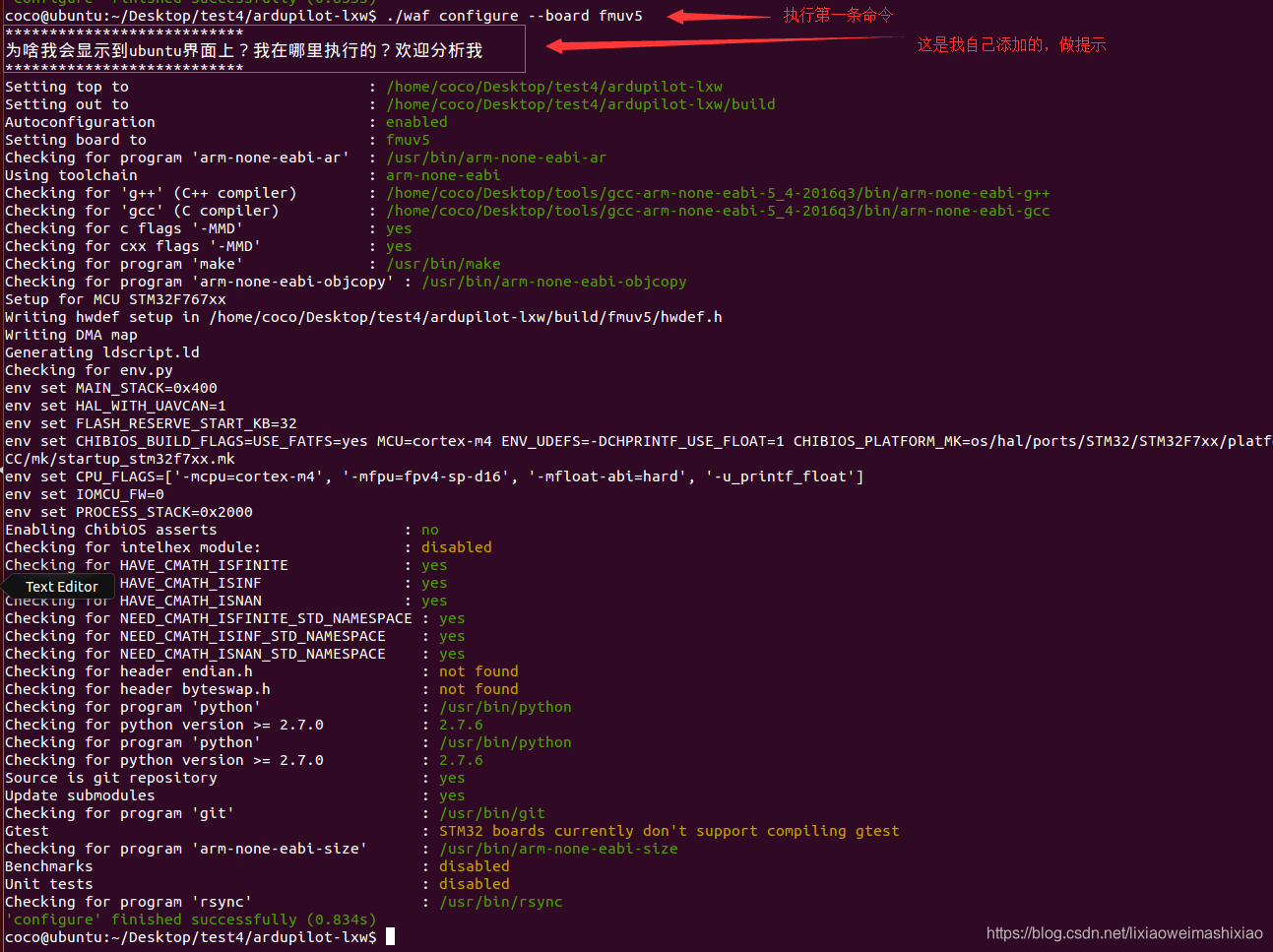
之所以ubuntu会回显这些字符,是因为我们采用了python的print打印输出函数,python我也是刚学习没多久,不做讲解。
1.总的wscript分析
分析之前先注意一个文件夹
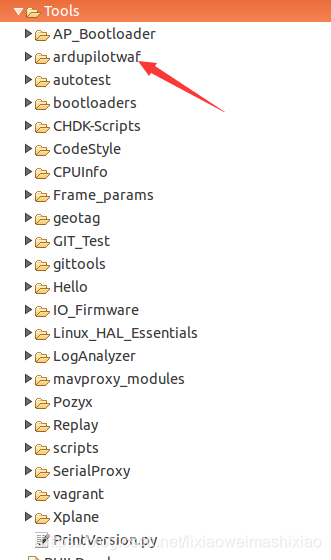
1.ardupilotwaf文件夹内容
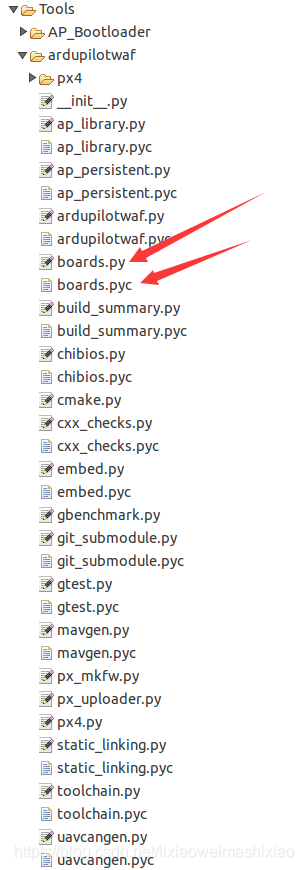
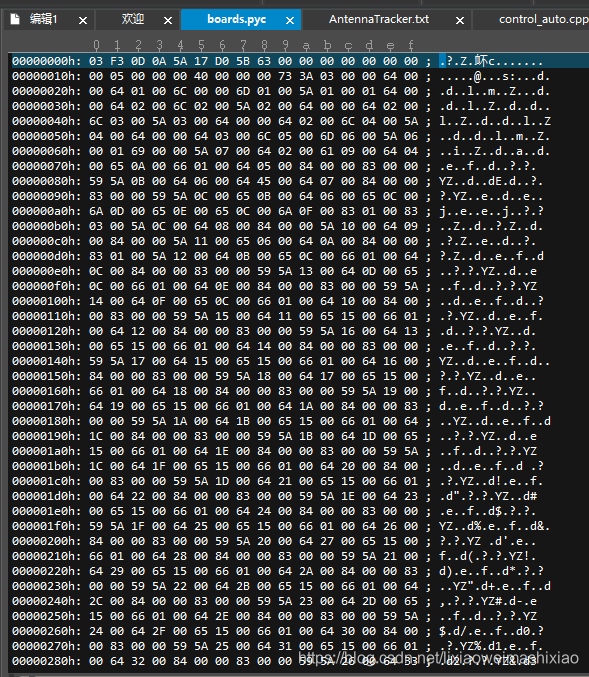
注意:什么是.pyc文件:pyc文件是python文件编译后生成的字节码文件(byte code)。pyc文件经过python解释器最终会生成机器码运行。所以pyc文件是可以跨平台部署的,类似Java的.class文件。一般py文件改变后,都会重新生成pyc文件。
采用UltraEdit软件打开ardupilotwaf文件下面的board.pyc,全部是编码,这个编码是有python编译board.py生成
2.分析脚本运行
1.主脚本代码
整体代码内容:导入模块和定义
#!/usr/bin/env python #python输入格式要求,大部分python文件的头部都会写上 #!/usr/bin/python 或者 #!/usr/bin/env ,这个语句主要和运行模式有关,使用后者可以解释不一定在python目录
# encoding: utf-8 #一种变长字节编码方式
#在开头加上from __future__ import print_function这句之后,即使在python2.X,使用print就得像python3.X那样加括号使用。
#python2.X中print不需要括号,而在python3.X中则需要。
from __future__ import print_function #主要就是设置print
print('ardupilot开始编译') #字节添加代码
import os.path #导入os.path模块,获取当前脚本路径,加载到sys.path里,就是组织代码使用
import sys #导入sys,用来获取当前模块的绝对路径
sys.path.insert(0, 'Tools/ardupilotwaf/') #把ardupilotwaf加载到当前路径
import ardupilotwaf #上面加载路径完成后,现在就可以导入这个模块,可以被后面使用
print("ardupilotwaf=",ardupilotwaf) #这个打印输出:ardupilotwaf= <module 'ardupilotwaf' from 'Tools/ardupilotwaf/ardupilotwaf.pyc'>
import boards #导入boards
print("boards=",boards) #打印输出:boards= <module 'boards' from 'Tools/ardupilotwaf/boards.pyc'>
from waflib import Build, ConfigSet, Configure, Context, Utils #从waflib库导入Build, ConfigSet, Configure, Context, Utils;这个waflib在modules下面
# TODO: implement a command 'waf help' that shows the basic tasks a(执行waf命令帮助(waf help))
# developer might want to do: e.g. how to configure a board, compile a
# vehicle, compile all the examples, add a new example. Should fit in
# less than a terminal screen, ideally commands should be copy
# pastable. Add the 'export waf="$PWD/waf"' trick to be copy-pastable
# as well.
# TODO: replace defines with the use of the generated ap_config.h file
# this makes recompilation at least when defines change. which might
# be sufficient.
# Default installation prefix for Linux boards
default_prefix = '/usr/' #变量赋值
#定义函数
def _set_build_context_variant(variant):
for c in Context.classes:
if not issubclass(c, Build.BuildContext):
continue
c.variant = variant
#定义函数
def init(ctx):
env = ConfigSet.ConfigSet()
try:
p = os.path.join(Context.out_dir, Build.CACHE_DIR, Build.CACHE_SUFFIX)
env.load(p)
except:
return
Configure.autoconfig = 'clobber' if env.AUTOCONFIG else False
if 'VARIANT' not in env:
return
# define the variant build commands according to the board
_set_build_context_variant(env.VARIANT)
#定义函数
def options(opt):
opt.load('compiler_cxx compiler_c waf_unit_test python')
opt.load('ardupilotwaf')
opt.load('build_summary')
g = opt.ap_groups['configure']
boards_names = boards.get_boards_names()
g.add_option('--board',
action='store',
choices=boards_names,
default='sitl',
help='Target board to build, choices are %s.' % boards_names)
g.add_option('--debug',
action='store_true',
default=False,
help='Configure as debug variant.')
g.add_option('--enable-asserts',
action='store_true',
default=False,
help='enable OS level asserts.')
g.add_option('--bootloader',
action='store_true',
default=False,
help='Configure for building a bootloader.')
g.add_option('--no-autoconfig',
dest='autoconfig',
action='store_false',
default=True,
help='''Disable autoconfiguration feature. By default, the build system
triggers a reconfiguration whenever it thinks it's necessary - this
option disables that.
''')
g.add_option('--no-submodule-update',
dest='submodule_update',
action='store_false',
default=True,
help='''Don't update git submodules. Useful for building with
submodules at specific revisions.
''')
g.add_option('--enable-header-checks', action='store_true',
default=False,
help="Enable checking of headers")
print('***************************')
print("为啥我会显示到ubuntu界面上?我在哪里执行的?欢迎分析我")
print('***************************')
g.add_option('--default-parameters',
default=None,
help='set default parameters to embed in the firmware')
g = opt.ap_groups['linux']
linux_options = ('--prefix', '--destdir', '--bindir', '--libdir')
for k in linux_options:
option = opt.parser.get_option(k)
if option:
opt.parser.remove_option(k)
g.add_option(option)
g.add_option('--apstatedir',
action='store',
default='',
help='''Where to save data like parameters, log and terrain.
This is the --localstatedir + ArduPilots subdirectory [default:
board-dependent, usually /var/lib/ardupilot]''')
g.add_option('--rsync-dest',
dest='rsync_dest',
action='store',
default='',
help='''Destination for the rsync Waf command. It can be passed during
configuration in order to save typing.
''')
g.add_option('--enable-benchmarks',
action='store_true',
default=False,
help='Enable benchmarks.')
g.add_option('--enable-lttng', action='store_true',
default=False,
help="Enable lttng integration")
g.add_option('--disable-libiio', action='store_true',
default=False,
help="Don't use libiio even if supported by board and dependencies available")
g.add_option('--disable-tests', action='store_true',
default=False,
help="Disable compilation and test execution")
g.add_option('--enable-sfml', action='store_true',
default=False,
help="Enable SFML graphics library")
g.add_option('--static',
action='store_true',
default=False,
help='Force a static build')
#定义函数
def _collect_autoconfig_files(cfg):
for m in sys.modules.values():
paths = []
if hasattr(m, '__file__') and m.__file__ is not None:
paths.append(m.__file__)
elif hasattr(m, '__path__'):
for p in m.__path__:
if p is not None:
paths.append(p)
for p in paths:
if p in cfg.files or not os.path.isfile(p):
continue
with open(p, 'rb') as f:
cfg.hash = Utils.h_list((cfg.hash, f.read()))
cfg.files.append(p)
#定义函数
def configure(cfg):
cfg.env.BOARD = cfg.options.board
cfg.env.DEBUG = cfg.options.debug
cfg.env.AUTOCONFIG = cfg.options.autoconfig
cfg.env.VARIANT = cfg.env.BOARD
_set_build_context_variant(cfg.env.VARIANT)
cfg.setenv(cfg.env.VARIANT)
cfg.env.BOARD = cfg.options.board
cfg.env.DEBUG = cfg.options.debug
cfg.env.ENABLE_ASSERTS = cfg.options.enable_asserts
cfg.env.BOOTLOADER = cfg.options.bootloader
# Allow to differentiate our build from the make build
cfg.define('WAF_BUILD', 1)
cfg.msg('Autoconfiguration', 'enabled' if cfg.options.autoconfig else 'disabled')
if cfg.options.static:
cfg.msg('Using static linking', 'yes', color='YELLOW')
cfg.env.STATIC_LINKING = True
cfg.load('ap_library')
cfg.msg('Setting board to', cfg.options.board)
cfg.get_board().configure(cfg)
cfg.load('clang_compilation_database')
cfg.load('waf_unit_test')
cfg.load('mavgen')
cfg.load('uavcangen')
cfg.env.SUBMODULE_UPDATE = cfg.options.submodule_update
cfg.start_msg('Source is git repository')
if cfg.srcnode.find_node('.git'):
cfg.end_msg('yes')
else:
cfg.end_msg('no')
cfg.env.SUBMODULE_UPDATE = False
cfg.msg('Update submodules', 'yes' if cfg.env.SUBMODULE_UPDATE else 'no')
cfg.load('git_submodule')
if cfg.options.enable_benchmarks:
cfg.load('gbenchmark')
cfg.load('gtest')
cfg.load('static_linking')
cfg.load('build_summary')
cfg.start_msg('Benchmarks')
if cfg.env.HAS_GBENCHMARK:
cfg.end_msg('enabled')
else:
cfg.end_msg('disabled', color='YELLOW')
cfg.start_msg('Unit tests')
if cfg.env.HAS_GTEST:
cfg.end_msg('enabled')
else:
cfg.end_msg('disabled', color='YELLOW')
cfg.env.append_value('GIT_SUBMODULES', 'mavlink')
cfg.env.prepend_value('INCLUDES', [
cfg.srcnode.abspath() + '/libraries/',
])
cfg.find_program('rsync', mandatory=False)
if cfg.options.rsync_dest:
cfg.msg('Setting rsync destination to', cfg.options.rsync_dest)
cfg.env.RSYNC_DEST = cfg.options.rsync_dest
if cfg.options.enable_header_checks:
cfg.msg('Enabling header checks', cfg.options.enable_header_checks)
cfg.env.ENABLE_HEADER_CHECKS = True
else:
cfg.env.ENABLE_HEADER_CHECKS = False
# TODO: Investigate if code could be changed to not depend on the
# source absolute path.
cfg.env.prepend_value('DEFINES', [
'SKETCHBOOK="' + cfg.srcnode.abspath() + '"',
])
# Always use system extensions
cfg.define('_GNU_SOURCE', 1)
cfg.write_config_header(os.path.join(cfg.variant, 'ap_config.h'))
_collect_autoconfig_files(cfg)
#定义函数
def collect_dirs_to_recurse(bld, globs, **kw):
dirs = []
globs = Utils.to_list(globs)
if bld.bldnode.is_child_of(bld.srcnode):
kw['excl'] = Utils.to_list(kw.get('excl', []))
kw['excl'].append(bld.bldnode.path_from(bld.srcnode))
for g in globs:
for d in bld.srcnode.ant_glob(g + '/wscript', **kw):
dirs.append(d.parent.relpath())
return dirs
#定义函数
def list_boards(ctx):
print(*boards.get_boards_names()) #这里打印板子名称
#定义函数
def board(ctx):
env = ConfigSet.ConfigSet()
try:
p = os.path.join(Context.out_dir, Build.CACHE_DIR, Build.CACHE_SUFFIX)
env.load(p)
except:
print('No board currently configured')
return
print('***************************')
print('Board configured to: {}'.format(env.VARIANT))
print('***************************')
#定义函数
def _build_cmd_tweaks(bld):
if bld.cmd == 'check-all':
bld.options.all_tests = True
bld.cmd = 'check'
if bld.cmd == 'check':
if not bld.env.HAS_GTEST:
bld.fatal('check: gtest library is required')
bld.options.clear_failed_tests = True
#定义函数
def _build_dynamic_sources(bld):
if not bld.env.BOOTLOADER:
bld(
features='mavgen',
source='modules/mavlink/message_definitions/v1.0/ardupilotmega.xml',
output_dir='libraries/GCS_MAVLink/include/mavlink/v2.0/',
name='mavlink',
# this below is not ideal, mavgen tool should set this, but that's not
# currently possible
export_includes=[
bld.bldnode.make_node('libraries').abspath(),
bld.bldnode.make_node('libraries/GCS_MAVLink').abspath(),
],
)
if bld.get_board().with_uavcan or bld.env.HAL_WITH_UAVCAN==True:
bld(
features='uavcangen',
source=bld.srcnode.ant_glob('modules/uavcan/dsdl/uavcan/**/*.uavcan'),
output_dir='modules/uavcan/libuavcan/include/dsdlc_generated',
name='uavcan',
export_includes=[
bld.bldnode.make_node('modules/uavcan/libuavcan/include/dsdlc_generated').abspath(),
]
)
def write_version_header(tsk):
bld = tsk.generator.bld
return bld.write_version_header(tsk.outputs[0].abspath())
bld(
name='ap_version',
target='ap_version.h',
vars=['AP_VERSION_ITEMS'],
rule=write_version_header,
)
bld.env.prepend_value('INCLUDES', [
bld.bldnode.abspath(),
])
#定义函数
def _build_common_taskgens(bld):
# NOTE: Static library with vehicle set to UNKNOWN, shared by all
# the tools and examples. This is the first step until the
# dependency on the vehicles is reduced. Later we may consider
# split into smaller pieces with well defined boundaries.
bld.ap_stlib(
name='ap',
ap_vehicle='UNKNOWN',
ap_libraries=bld.ap_get_all_libraries(),
)
if bld.env.HAS_GTEST:
bld.libgtest(cxxflags=['-include', 'ap_config.h'])
if bld.env.HAS_GBENCHMARK:
bld.libbenchmark()
#定义函数
def _build_recursion(bld):
common_dirs_patterns = [
# TODO: Currently each vehicle also generate its own copy of the
# libraries. Fix this, or at least reduce the amount of
# vehicle-dependent libraries.
'*',
'Tools/*',
'libraries/*/examples/*',
'libraries/*/tests',
'libraries/*/utility/tests',
'libraries/*/benchmarks',
]
common_dirs_excl = [
'modules',
'libraries/AP_HAL_*',
'libraries/SITL',
]
hal_dirs_patterns = [
'libraries/%s/tests',
'libraries/%s/*/tests',
'libraries/%s/*/benchmarks',
'libraries/%s/examples/*',
]
dirs_to_recurse = collect_dirs_to_recurse(
bld,
common_dirs_patterns,
excl=common_dirs_excl,
)
if bld.env.IOMCU_FW is not None:
if bld.env.IOMCU_FW:
dirs_to_recurse.append('libraries/AP_IOMCU/iofirmware')
for p in hal_dirs_patterns:
dirs_to_recurse += collect_dirs_to_recurse(
bld,
[p % l for l in bld.env.AP_LIBRARIES],
)
# NOTE: we need to sort to ensure the repeated sources get the
# same index, and random ordering of the filesystem doesn't cause
# recompilation.
dirs_to_recurse.sort()
for d in dirs_to_recurse:
bld.recurse(d)
#定义函数
def _build_post_funs(bld):
if bld.cmd == 'check':
bld.add_post_fun(ardupilotwaf.test_summary)
else:
bld.build_summary_post_fun()
if bld.env.SUBMODULE_UPDATE:
bld.git_submodule_post_fun()
#定义函数
def load_pre_build(bld):
'''allow for a pre_build() function in build modules'''
brd = bld.get_board()
if getattr(brd, 'pre_build', None):
brd.pre_build(bld)
#定义函数
def build(bld):
config_hash = Utils.h_file(bld.bldnode.make_node('ap_config.h').abspath())
bld.env.CCDEPS = config_hash
bld.env.CXXDEPS = config_hash
bld.post_mode = Build.POST_LAZY
bld.load('ardupilotwaf')
bld.env.AP_LIBRARIES_OBJECTS_KW.update(
use=['mavlink'],
cxxflags=['-include', 'ap_config.h'],
)
load_pre_build(bld)
if bld.get_board().with_uavcan:
bld.env.AP_LIBRARIES_OBJECTS_KW['use'] += ['uavcan']
_build_cmd_tweaks(bld)
if bld.env.SUBMODULE_UPDATE:
bld.add_group('git_submodules')
for name in bld.env.GIT_SUBMODULES:
bld.git_submodule(name)
bld.add_group('dynamic_sources')
_build_dynamic_sources(bld)
bld.add_group('build')
bld.get_board().build(bld)
_build_common_taskgens(bld)
_build_recursion(bld)
_build_post_funs(bld)
ardupilotwaf.build_command('check',
program_group_list='all',
doc='builds all programs and run tests',
)
ardupilotwaf.build_command('check-all',
program_group_list='all',
doc='shortcut for `waf check --alltests`',
)
for name in ('antennatracker', 'copter', 'heli', 'plane', 'rover', 'sub', 'bootloader','iofirmware'):
ardupilotwaf.build_command(name,
program_group_list=name,
doc='builds %s programs' % name,
)
for program_group in ('all', 'bin', 'tools', 'examples', 'tests', 'benchmarks'):
ardupilotwaf.build_command(program_group,
program_group_list=program_group,
doc='builds all programs of %s group' % program_group,
)
class LocalInstallContext(Build.InstallContext):
"""runs install using BLD/install as destdir, where BLD is the build variant directory"""
cmd = 'localinstall'
def __init__(self, **kw):
super(LocalInstallContext, self).__init__(**kw)
self.local_destdir = os.path.join(self.variant_dir, 'install')
def execute(self):
old_destdir = self.options.destdir
self.options.destdir = self.local_destdir
r = super(LocalInstallContext, self).execute()
self.options.destdir = old_destdir
return r
class RsyncContext(LocalInstallContext):
"""runs localinstall and then rsyncs BLD/install with the target system"""
cmd = 'rsync'
def __init__(self, **kw):
super(RsyncContext, self).__init__(**kw)
self.add_pre_fun(RsyncContext.create_rsync_taskgen)
def create_rsync_taskgen(self):
if 'RSYNC' not in self.env:
self.fatal('rsync program seems not to be installed, can\'t continue')
self.add_group()
tg = self(
name='rsync',
rule='${RSYNC} -a ${RSYNC_SRC}/ ${RSYNC_DEST}',
always=True,
)
tg.env.RSYNC_SRC = self.local_destdir
if self.options.rsync_dest:
self.env.RSYNC_DEST = self.options.rsync_dest
if 'RSYNC_DEST' not in tg.env:
self.fatal('Destination for rsync not defined. Either pass --rsync-dest here or during configuration.')
tg.post()
# print("===========================")
# print(*boards.get_boards_names()) #这里打印板子名称
# print("===========================")
要想弄明白这个代码,还是得一条一条分析,我在里面家里一部分打印函数,用来说明代码执行。./waf configure --board px4-v2后首先进入的就是wscript这个脚本
1.ardupilotwaf.py和board.py被加载
#!/usr/bin/env python
# encoding: utf-8
#在开头加上from __future__ import print_function这句之后,即使在python2.X,使用print就得像python3.X那样加括号使用。python2.X中print不需要括号,而在python3.X中则需要。
from __future__ import print_function
from waflib import Build, Logs, Options, Utils #从waflib导入Build,Logs,Options,Utils
print("导入Build=",Build) #导入Build= <module 'waflib.Build' from '/home/coco/Desktop/test4/ardupilot-lxw/modules/waf/waflib/Build.pyc'>
print("导入Logs=",Logs) #导入Logs= <module 'waflib.Logs' from '/home/coco/Desktop/test4/ardupilot-lxw/modules/waf/waflib/Logs.pyc'>
print("导入Options=",Options) #导入Options= <module 'waflib.Options' from '/home/coco/Desktop/test4/ardupilot-lxw/modules/waf/waflib/Options.pyc'>
print("导入Utils=",Utils) #导入Utils= <module 'waflib.Utils' from '/home/coco/Desktop/test4/ardupilot-lxw/modules/waf/waflib/Utils.pyc'>
from waflib.Configure import conf #waflib.Configure导入函数
from waflib.TaskGen import before_method, feature #从waflib.TaskGen导入before_method,feature函数
import os.path, os
from collections import OrderedDict
import ap_persistent
print("导入ap_persistent=",ap_persistent)
print("编译ardupilotwaf.py") #增加该print说明函数跑到这里
SOURCE_EXTS = [ #定义字符列表
'*.S',
'*.c',
'*.cpp',
]
COMMON_VEHICLE_DEPENDENT_LIBRARIES = [ #定义所有的设备库字符列表
'AP_AccelCal',
'AP_ADC',
'AP_AHRS',
'AP_Airspeed',
'AP_Baro',
'AP_BattMonitor',
'AP_BoardConfig',
'AP_Buffer',
'AP_Common',
'AP_Compass',
'AP_Declination',
'AP_GPS',
'AP_HAL',
'AP_HAL_Empty',
'AP_InertialSensor',
'AP_Math',
'AP_Mission',
'AP_NavEKF2',
'AP_NavEKF3',
'AP_Notify',
'AP_OpticalFlow',
'AP_Param',
'AP_Rally',
'AP_RangeFinder',
'AP_Scheduler',
'AP_SerialManager',
'AP_Terrain',
'AP_Vehicle',
'DataFlash',
'Filter',
'GCS_MAVLink',
'RC_Channel',
'SRV_Channel',
'StorageManager',
'AP_Tuning',
'AP_RPM',
'AP_RSSI',
'AP_Mount',
'AP_Module',
'AP_Button',
'AP_ICEngine',
'AP_Frsky_Telem',
'AP_FlashStorage',
'AP_Relay',
'AP_ServoRelayEvents',
'AP_Volz_Protocol',
'AP_SBusOut',
'AP_IOMCU',
'AP_RAMTRON',
'AP_RCProtocol',
'AP_Radio',
'AP_TempCalibration',
'AP_VisualOdom',
'AP_BLHeli',
'AP_ROMFS',
'AP_Proximity',
'AP_Gripper',
'AP_RTC',
'AC_Sprayer',
]
#定义函数get_legacy_defines()
def get_legacy_defines(sketch_name):
return [
'APM_BUILD_DIRECTORY=APM_BUILD_' + sketch_name,
'SKETCH="' + sketch_name + '"',
'SKETCHNAME="' + sketch_name + '"',
]
IGNORED_AP_LIBRARIES = [
'doc',
]
#‘@’符号用作函数修饰符是python2.4新增加的功能,修饰符必须出现在函数定义前一行,不允许和函数定义在同一行。
# 从这里可以看出@conf 等价于 conf(ap_get_all_libraries())
@conf
#定义函数ap_get_all_libraries()
def ap_get_all_libraries(bld):
if bld.env.BOOTLOADER:
# we don't need the full set of libraries for the bootloader build
#print("+++++++++")
return ['AP_HAL']
libraries = []
for lib_node in bld.srcnode.ant_glob('libraries/*', dir=True, src=False):
name = lib_node.name
if name in IGNORED_AP_LIBRARIES:
continue
if name.startswith('AP_HAL'):
continue
if name == 'SITL':
continue
libraries.append(name)
libraries.extend(['AP_HAL', 'AP_HAL_Empty'])
return libraries
# 从这里可以看出@conf 等价于 conf(ap_common_vehicle_libraries(bld))
@conf
def ap_common_vehicle_libraries(bld):
libraries = COMMON_VEHICLE_DEPENDENT_LIBRARIES
if bld.env.DEST_BINFMT == 'pe':
libraries += [
'AC_Fence',
]
return libraries
_grouped_programs = {}
# 从这里可以看出@conf 等价于 conf(ap_program())
@conf
def ap_program(bld,
program_groups='bin',
program_dir=None,
use_legacy_defines=True,
program_name=None,
**kw):
if 'target' in kw:
bld.fatal('Do not pass target for program')
if 'defines' not in kw:
kw['defines'] = []
if 'source' not in kw:
kw['source'] = bld.path.ant_glob(SOURCE_EXTS)
if not program_name:
program_name = bld.path.name
if use_legacy_defines:
kw['defines'].extend(get_legacy_defines(bld.path.name))
kw['cxxflags'] = kw.get('cxxflags', []) + ['-include', 'ap_config.h']
kw['features'] = kw.get('features', []) + bld.env.AP_PROGRAM_FEATURES
program_groups = Utils.to_list(program_groups)
if not program_dir:
program_dir = program_groups[0]
name = os.path.join(program_dir, program_name)
tg_constructor = bld.program
if bld.env.AP_PROGRAM_AS_STLIB:
tg_constructor = bld.stlib
else:
if bld.env.STATIC_LINKING:
kw['features'].append('static_linking')
tg = tg_constructor(
target='#%s' % name,
name=name,
program_name=program_name,
program_dir=program_dir,
**kw
)
for group in program_groups:
_grouped_programs.setdefault(group, []).append(tg)
# 从这里可以看出@conf 等价于 conf(ap_example())
@conf
def ap_example(bld, **kw):
kw['program_groups'] = 'examples'
ap_program(bld, use_legacy_defines=False, **kw)
def unique_list(items):
'''remove duplicate elements from a list while maintaining ordering'''
return list(OrderedDict.fromkeys(items))
# @conf 等价于 conf(ap_stlib())
@conf
def ap_stlib(bld, **kw):
if 'name' not in kw:
bld.fatal('Missing name for ap_stlib')
if 'ap_vehicle' not in kw:
bld.fatal('Missing ap_vehicle for ap_stlib')
if 'ap_libraries' not in kw:
bld.fatal('Missing ap_libraries for ap_stlib')
kw['ap_libraries'] = unique_list(kw['ap_libraries'] + bld.env.AP_LIBRARIES)
for l in kw['ap_libraries']:
bld.ap_library(l, kw['ap_vehicle'])
kw['features'] = kw.get('features', []) + ['cxx', 'cxxstlib']
kw['target'] = kw['name']
kw['source'] = []
bld.stlib(**kw)
_created_program_dirs = set()
@feature('cxxstlib', 'cxxprogram')
@before_method('process_rule')
def ap_create_program_dir(self):
if not hasattr(self, 'program_dir'):
return
if self.program_dir in _created_program_dirs:
return
self.bld.bldnode.make_node(self.program_dir).mkdir()
_created_program_dirs.add(self.program_dir)
@feature('cxxstlib')
@before_method('process_rule')
def ap_stlib_target(self):
if self.target.startswith('#'):
self.target = self.target[1:]
self.target = '#%s' % os.path.join('lib', self.target)
# @conf 等价于 conf(ap_find_tests)
@conf
def ap_find_tests(bld, use=[]):
if not bld.env.HAS_GTEST:
return
features = []
if bld.cmd == 'check':
features.append('test')
use = Utils.to_list(use)
use.append('GTEST')
includes = [bld.srcnode.abspath() + '/tests/']
for f in bld.path.ant_glob(incl='*.cpp'):
ap_program(
bld,
features=features,
includes=includes,
source=[f],
use=use,
program_name=f.change_ext('').name,
program_groups='tests',
use_legacy_defines=False,
cxxflags=['-Wno-undef'],
)
_versions = []
# @conf 等价于 conf(ap_version_append_str())
@conf
def ap_version_append_str(ctx, k, v):
ctx.env['AP_VERSION_ITEMS'] += [(k, '"{}"'.format(os.environ.get(k, v)))]
@conf
def ap_version_append_int(ctx, k, v):
ctx.env['AP_VERSION_ITEMS'] += [(k,v)]
@conf
def write_version_header(ctx, tgt):
with open(tgt, 'w') as f:
print(
'''// auto-generated header, do not edit
#pragma once
#ifndef FORCE_VERSION_H_INCLUDE
#error ap_version.h should never be included directly. You probably want to include AP_Common/AP_FWVersion.h
#endif
''', file=f)
for k, v in ctx.env['AP_VERSION_ITEMS']:
print('#define {} {}'.format(k, v), file=f)
@conf
def ap_find_benchmarks(bld, use=[]):
if not bld.env.HAS_GBENCHMARK:
return
includes = [bld.srcnode.abspath() + '/benchmarks/']
for f in bld.path.ant_glob(incl='*.cpp'):
ap_program(
bld,
features=['gbenchmark'],
includes=includes,
source=[f],
use=use,
program_name=f.change_ext('').name,
program_groups='benchmarks',
use_legacy_defines=False,
)
def test_summary(bld):
from io import BytesIO
import sys
if not hasattr(bld, 'utest_results'):
Logs.info('check: no test run')
return
fails = []
for filename, exit_code, out, err in bld.utest_results:
Logs.pprint('GREEN' if exit_code == 0 else 'YELLOW',
' %s' % filename,
'returned %d' % exit_code)
if exit_code != 0:
fails.append(filename)
elif not bld.options.check_verbose:
continue
if len(out):
buf = BytesIO(out)
for line in buf:
print(" OUT: %s" % line.decode(), end='', file=sys.stderr)
print()
if len(err):
buf = BytesIO(err)
for line in buf:
print(" ERR: %s" % line.decode(), end='', file=sys.stderr)
print()
if not fails:
Logs.info('check: All %u tests passed!' % len(bld.utest_results))
return
Logs.error('check: %u of %u tests failed' %
(len(fails), len(bld.utest_results)))
for filename in fails:
Logs.error(' %s' % filename)
bld.fatal('check: some tests failed')
_build_commands = {}
def _process_build_command(bld):
if bld.cmd not in _build_commands:
return
params = _build_commands[bld.cmd]
targets = params['targets']
if targets:
if bld.targets:
bld.targets += ',' + targets
else:
bld.targets = targets
program_group_list = Utils.to_list(params['program_group_list'])
bld.options.program_group.extend(program_group_list)
#编译命令
def build_command(name,
targets=None,
program_group_list=[],
doc='build shortcut'):
_build_commands[name] = dict(
targets=targets,
program_group_list=program_group_list,
)
class context_class(Build.BuildContext):
cmd = name
context_class.__doc__ = doc
#定义_select_programs_from_group(bld)函数
def _select_programs_from_group(bld):
groups = bld.options.program_group
if not groups:
if bld.targets:
groups = []
else:
groups = ['bin']
if 'all' in groups:
groups = _grouped_programs.keys()
for group in groups:
if group not in _grouped_programs:
bld.fatal('Group %s not found' % group)
tg = _grouped_programs[group][0]
if bld.targets:
bld.targets += ',' + tg.name
else:
bld.targets = tg.name
for tg in _grouped_programs[group][1:]:
bld.targets += ',' + tg.name
def options(opt):
opt.ap_groups = {
'configure': opt.add_option_group('Ardupilot configure options'),
'linux': opt.add_option_group('Linux boards configure options'),
'build': opt.add_option_group('Ardupilot build options'),
'check': opt.add_option_group('Ardupilot check options'),
'clean': opt.add_option_group('Ardupilot clean options'),
}
g = opt.ap_groups['build']
g.add_option('--program-group',
action='append',
default=[],
help='''Select all programs that go in <PROGRAM_GROUP>/ for the build.
Example: `waf --program-group examples` builds all examples. The
special group "all" selects all programs.
''')
g.add_option('--upload',
action='store_true',
help='''Upload applicable targets to a connected device. Not all
platforms may support this. Example: `waf copter --upload` means "build
arducopter and upload it to my board".
''')
g = opt.ap_groups['check']
g.add_option('--check-verbose',
action='store_true',
help='Output all test programs.')
g = opt.ap_groups['clean']
g.add_option('--clean-all-sigs',
action='store_true',
help='''Clean signatures for all tasks. By default, tasks that scan for
implicit dependencies (like the compilation tasks) keep the dependency
information across clean commands, so that that information is changed
only when really necessary. Also, some tasks that don't really produce
files persist their signature. This option avoids that behavior when
cleaning the build.
''')
def build(bld):
print("^^^^^^^^^^^^^^^^^^")
bld.add_pre_fun(_process_build_command)
bld.add_pre_fun(_select_programs_from_group)
print("^^^^^^^^^^^^^^^^^^")
#!/usr/bin/env python
# encoding: utf-8
from collections import OrderedDict
import sys, os
import waflib
from waflib.Configure import conf
_board_classes = {}
_board = None
#类定义Meta板
class BoardMeta(type):
def __init__(cls, name, bases, dct): #方法定义
super(BoardMeta, cls).__init__(name, bases, dct)
if 'abstract' not in cls.__dict__:
cls.abstract = False
if cls.abstract:
return
if not hasattr(cls, 'toolchain'):
cls.toolchain = 'native'
board_name = getattr(cls, 'name', name)
if board_name in _board_classes:
raise Exception('board named %s already exists' % board_name)
_board_classes[board_name] = cls
#类定义
class Board:
abstract = True
def __init__(self):
self.with_uavcan = False
def configure(self, cfg):
cfg.env.TOOLCHAIN = self.toolchain
cfg.env.ROMFS_FILES = []
cfg.load('toolchain')
cfg.load('cxx_checks')
env = waflib.ConfigSet.ConfigSet()
self.configure_env(cfg, env)
d = env.get_merged_dict()
# Always prepend so that arguments passed in the command line get
# the priority.
for k, val in d.items():
# Dictionaries (like 'DEFINES') are converted to lists to
# conform to waf conventions.
if isinstance(val, dict):
keys = list(val.keys())
if not isinstance(val, OrderedDict):
keys.sort()
val = ['%s=%s' % (vk, val[vk]) for vk in keys]
if k in cfg.env and isinstance(cfg.env[k], list):
cfg.env.prepend_value(k, val)
else:
cfg.env[k] = val
cfg.ap_common_checks()
cfg.env.prepend_value('INCLUDES', [
cfg.srcnode.find_dir('libraries/AP_Common/missing').abspath()
])
def configure_env(self, cfg, env):
# Use a dictionary instead of the convetional list for definitions to
# make easy to override them. Convert back to list before consumption.
env.DEFINES = {}
env.CFLAGS += [
'-ffunction-sections',
'-fdata-sections',
'-fsigned-char',
'-Wall',
'-Wextra',
'-Wformat',
'-Wshadow',
'-Wpointer-arith',
'-Wcast-align',
'-Wundef',
'-Wno-missing-field-initializers',
'-Wno-unused-parameter',
'-Wno-redundant-decls',
'-Wno-unknown-pragmas',
'-Wno-trigraphs',
'-Werror=return-type',
'-Werror=unused-result',
]
if 'clang' in cfg.env.COMPILER_CC:
env.CFLAGS += [
'-fcolor-diagnostics',
'-Wno-gnu-designator',
'-Wno-inconsistent-missing-override',
'-Wno-mismatched-tags',
'-Wno-gnu-variable-sized-type-not-at-end',
'-Wno-c++11-narrowing'
]
if cfg.env.DEBUG:
env.CFLAGS += [
'-g',
'-O0',
]
env.CXXFLAGS += [
'-std=gnu++11',
'-fdata-sections',
'-ffunction-sections',
'-fno-exceptions',
'-fsigned-char',
'-Wall',
'-Wextra',
'-Wformat',
'-Wshadow',
'-Wpointer-arith',
'-Wcast-align',
'-Wundef',
'-Wno-unused-parameter',
'-Wno-missing-field-initializers',
'-Wno-reorder',
'-Wno-redundant-decls',
'-Wno-unknown-pragmas',
'-Werror=format-security',
'-Werror=array-bounds',
'-Werror=uninitialized',
'-Werror=init-self',
'-Werror=return-type',
'-Werror=switch',
'-Werror=sign-compare',
'-Werror=unused-result',
'-Wfatal-errors',
'-Wno-trigraphs',
]
if 'clang++' in cfg.env.COMPILER_CXX:
env.CXXFLAGS += [
'-fcolor-diagnostics',
'-Wno-gnu-designator',
'-Wno-inconsistent-missing-override',
'-Wno-mismatched-tags',
'-Wno-gnu-variable-sized-type-not-at-end',
'-Wno-c++11-narrowing'
]
else:
env.CXXFLAGS += [
'-Werror=unused-but-set-variable'
]
if cfg.env.DEBUG:
env.CXXFLAGS += [
'-g',
'-O0',
]
if cfg.env.DEST_OS == 'darwin':
env.LINKFLAGS += [
'-Wl,-dead_strip',
]
else:
env.LINKFLAGS += [
'-Wl,--gc-sections',
]
if self.with_uavcan:
env.AP_LIBRARIES += [
'AP_UAVCAN',
'modules/uavcan/libuavcan/src/**/*.cpp'
]
env.CXXFLAGS += [
'-Wno-error=cast-align',
]
env.DEFINES.update(
UAVCAN_CPP_VERSION = 'UAVCAN_CPP03',
UAVCAN_NO_ASSERTIONS = 1,
UAVCAN_NULLPTR = 'nullptr'
)
env.INCLUDES += [
cfg.srcnode.find_dir('modules/uavcan/libuavcan/include').abspath()
]
# We always want to use PRI format macros
cfg.define('__STDC_FORMAT_MACROS', 1)
def pre_build(self, bld):
'''pre-build hook that gets called before dynamic sources'''
if bld.env.ROMFS_FILES:
self.embed_ROMFS_files(bld)
def build(self, bld):
bld.ap_version_append_str('GIT_VERSION', bld.git_head_hash(short=True))
import time
ltime = time.localtime()
bld.ap_version_append_int('BUILD_DATE_YEAR', ltime.tm_year)
bld.ap_version_append_int('BUILD_DATE_MONTH', ltime.tm_mon)
bld.ap_version_append_int('BUILD_DATE_DAY', ltime.tm_mday)
def embed_ROMFS_files(self, ctx):
'''embed some files using AP_ROMFS'''
import embed
header = ctx.bldnode.make_node('ap_romfs_embedded.h').abspath()
if not embed.create_embedded_h(header, ctx.env.ROMFS_FILES):
bld.fatal("Failed to created ap_romfs_embedded.h")
Board = BoardMeta('Board', Board.__bases__, dict(Board.__dict__))
def add_dynamic_boards():
'''add boards based on existance of hwdef.dat in subdirectories for ChibiOS'''
dirname, dirlist, filenames = next(os.walk('libraries/AP_HAL_ChibiOS/hwdef'))
for d in dirlist:
if d in _board_classes.keys():
continue
hwdef = os.path.join(dirname, d, 'hwdef.dat')
if os.path.exists(hwdef):
newclass = type(d, (chibios,), {'name': d})
def get_boards_names():
add_dynamic_boards()
ret = sorted(list(_board_classes.keys()))
# some board types should not be selected
hidden = ['chibios']
for h in hidden:
if h in ret:
ret.remove(h)
return ret
@conf
def get_board(ctx):
global _board
if not _board:
if not ctx.env.BOARD:
ctx.fatal('BOARD environment variable must be set before first call to get_board()')
_board = _board_classes[ctx.env.BOARD]()
return _board
# NOTE: Keeping all the board definitions together so we can easily
# identify opportunities to simplify common flags. In the future might
# be worthy to keep board definitions in files of their own.
#注意:将所有的板定义保持在一起,这样我们就可以很容易地识别简化通用标志的机会。在未来可能值得保留的板层定义在自己的文件。
class sitl(Board):
def configure_env(self, cfg, env):
super(sitl, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD = 'HAL_BOARD_SITL',
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_NONE',
)
env.CXXFLAGS += [
'-Werror=float-equal'
]
if not cfg.env.DEBUG:
env.CXXFLAGS += [
'-O3',
]
env.LIB += [
'm',
]
cfg.check_librt(env)
env.LINKFLAGS += ['-pthread',]
env.AP_LIBRARIES += [
'AP_HAL_SITL',
'SITL',
]
if cfg.options.enable_sfml:
if not cfg.check_SFML(env):
cfg.fatal("Failed to find SFML libraries")
env.CXXFLAGS += ['-DWITH_SITL_OSD','-DOSD_ENABLED=ENABLED','-DHAL_HAVE_AP_ROMFS_EMBEDDED_H']
import fnmatch
for f in os.listdir('libraries/AP_OSD/fonts'):
if fnmatch.fnmatch(f, "font*bin"):
env.ROMFS_FILES += [(f,'libraries/AP_OSD/fonts/'+f)]
if sys.platform == 'cygwin':
env.LIB += [
'winmm',
]
env.CXXFLAGS += ['-DCYGWIN_BUILD']
if 'clang++' in cfg.env.COMPILER_CXX:
print("Disabling SLP for clang++")
env.CXXFLAGS += [
'-fno-slp-vectorize' # compiler bug when trying to use SLP
]
#定义chibios板
class chibios(Board):
toolchain = 'arm-none-eabi'
def configure_env(self, cfg, env):
super(chibios, self).configure_env(cfg, env)
cfg.load('chibios')
env.BOARD = self.name
env.DEFINES.update(
CONFIG_HAL_BOARD = 'HAL_BOARD_CHIBIOS',
HAVE_OCLOEXEC = 0,
HAVE_STD_NULLPTR_T = 0,
)
env.AP_LIBRARIES += [
'AP_HAL_ChibiOS',
]
# make board name available for USB IDs
env.CHIBIOS_BOARD_NAME = 'HAL_BOARD_NAME="%s"' % self.name
env.CXXFLAGS += cfg.env.CPU_FLAGS + [
'-Wlogical-op',
'-Wframe-larger-than=1300',
'-fsingle-precision-constant',
'-Wno-attributes',
'-Wno-error=double-promotion',
'-Wno-error=missing-declarations',
'-Wno-error=float-equal',
'-Wno-error=undef',
'-Wno-error=cpp',
'-Wno-cast-align',
'-fno-exceptions',
'-fno-rtti',
'-fno-threadsafe-statics',
'-Wall',
'-Wextra',
'-Wno-sign-compare',
'-Wfloat-equal',
'-Wpointer-arith',
'-Wmissing-declarations',
'-Wno-unused-parameter',
'-Werror=array-bounds',
'-Wfatal-errors',
'-Werror=unused-variable',
'-Werror=uninitialized',
'-Werror=init-self',
'-Wframe-larger-than=1024',
'-Werror=unused-but-set-variable',
'-Wno-missing-field-initializers',
'-Wno-trigraphs',
'-Os',
'-fno-strict-aliasing',
'-fomit-frame-pointer',
'-falign-functions=16',
'-ffunction-sections',
'-fdata-sections',
'-fno-strength-reduce',
'-fno-builtin-printf',
'-fno-builtin-fprintf',
'-fno-builtin-vprintf',
'-fno-builtin-vfprintf',
'-fno-builtin-puts',
'-mno-thumb-interwork',
'-mthumb',
'-DCHIBIOS_BOARD_NAME="%s"' % self.name,
'--specs=nano.specs',
'-specs=nosys.specs'
]
if sys.platform == 'cygwin':
env.CXXFLAGS += ['-DCYGWIN_BUILD']
bldnode = cfg.bldnode.make_node(self.name)
env.BUILDROOT = bldnode.make_node('').abspath()
env.LINKFLAGS = cfg.env.CPU_FLAGS + [
'-Os',
'-fomit-frame-pointer',
'-falign-functions=16',
'-ffunction-sections',
'-fdata-sections',
'-u_port_lock',
'-u_port_unlock',
'-u_exit',
'-u_kill',
'-u_getpid',
'-u_errno',
'-uchThdExit',
'-fno-common',
'-nostartfiles',
'-mno-thumb-interwork',
'-mthumb',
'-specs=nano.specs',
'-specs=nosys.specs',
'-L%s' % env.BUILDROOT,
'-L%s' % cfg.srcnode.make_node('modules/ChibiOS/os/common/startup/ARMCMx/compilers/GCC/ld/').abspath(),
'-L%s' % cfg.srcnode.make_node('libraries/AP_HAL_ChibiOS/hwdef/common/').abspath(),
'-Wl,--gc-sections,--no-warn-mismatch,--library-path=/ld,--script=ldscript.ld,--defsym=__process_stack_size__=%s,--defsym=__main_stack_size__=%s' % (cfg.env.PROCESS_STACK, cfg.env.MAIN_STACK)
]
if cfg.env.DEBUG:
env.CFLAGS += [
'-gdwarf-4',
'-g3',
]
env.LINKFLAGS += [
'-gdwarf-4',
'-g3',
]
if cfg.env.ENABLE_ASSERTS:
cfg.msg("Enabling ChibiOS asserts", "yes")
env.CFLAGS += [ '-DHAL_CHIBIOS_ENABLE_ASSERTS' ]
env.CXXFLAGS += [ '-DHAL_CHIBIOS_ENABLE_ASSERTS' ]
else:
cfg.msg("Enabling ChibiOS asserts", "no")
env.LIB += ['gcc', 'm']
env.GIT_SUBMODULES += [
'ChibiOS',
]
try:
import intelhex
env.HAVE_INTEL_HEX = True
cfg.msg("Checking for intelhex module:", 'OK')
except Exception:
cfg.msg("Checking for intelhex module:", 'disabled', color='YELLOW')
env.HAVE_INTEL_HEX = False
def build(self, bld):
super(chibios, self).build(bld)
bld.ap_version_append_str('CHIBIOS_GIT_VERSION', bld.git_submodule_head_hash('ChibiOS', short=True))
bld.load('chibios')
def pre_build(self, bld):
'''pre-build hook that gets called before dynamic sources'''
super(chibios, self).pre_build(bld)
from waflib.Context import load_tool
module = load_tool('chibios', [], with_sys_path=True)
fun = getattr(module, 'pre_build', None)
if fun:
fun(bld)
#定义linux板
class linux(Board):
def configure_env(self, cfg, env):
super(linux, self).configure_env(cfg, env)
cfg.find_toolchain_program('pkg-config', var='PKGCONFIG')
env.DEFINES.update(
CONFIG_HAL_BOARD = 'HAL_BOARD_LINUX',
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_NONE',
)
if not cfg.env.DEBUG:
env.CXXFLAGS += [
'-O3',
]
env.LIB += [
'm',
]
cfg.check_librt(env)
cfg.check_lttng(env)
cfg.check_libdl(env)
cfg.check_libiio(env)
env.LINKFLAGS += ['-pthread',]
env.AP_LIBRARIES += [
'AP_HAL_Linux',
]
if self.with_uavcan:
cfg.define('UAVCAN_EXCEPTIONS', 0)
if cfg.options.apstatedir:
cfg.define('AP_STATEDIR', cfg.options.apstatedir)
def build(self, bld):
super(linux, self).build(bld)
if bld.options.upload:
waflib.Options.commands.append('rsync')
# Avoid infinite recursion
bld.options.upload = False
#定义板子类型erleboard
class erleboard(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(erleboard, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_ERLEBOARD',
)
#定义板子类型navio
class navio(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(navio, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_NAVIO',
)
#定义板子类型navio2
class navio2(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(navio2, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_NAVIO2',
)
#定义板子类型edge
class edge(linux):
toolchain = 'arm-linux-gnueabihf'
def __init__(self):
self.with_uavcan = True
def configure_env(self, cfg, env):
super(edge, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_EDGE',
)
#定义板子类型zynq
class zynq(linux):
toolchain = 'arm-xilinx-linux-gnueabi'
def configure_env(self, cfg, env):
super(zynq, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_ZYNQ',
)
#定义板子类型ocpoc_zynq
class ocpoc_zynq(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(ocpoc_zynq, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_OCPOC_ZYNQ',
)
#定义板子类型bbbmini
class bbbmini(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(bbbmini, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_BBBMINI',
)
#定义板子类型blue
class blue(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(blue, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_BLUE',
)
class pocket(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(pocket, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_POCKET',
)
class pxf(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(pxf, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_PXF',
)
class bebop(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(bebop, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_BEBOP',
)
class disco(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(disco, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_DISCO',
)
class erlebrain2(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(erlebrain2, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_ERLEBRAIN2',
)
class bhat(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(bhat, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_BH',
)
class dark(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(dark, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_DARK',
)
class pxfmini(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(pxfmini, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_PXFMINI',
)
class aero(linux):
def __init__(self):
self.with_uavcan = True
def configure_env(self, cfg, env):
super(aero, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_AERO',
)
class rst_zynq(linux):
toolchain = 'arm-linux-gnueabihf'
def configure_env(self, cfg, env):
super(rst_zynq, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD_SUBTYPE = 'HAL_BOARD_SUBTYPE_LINUX_RST_ZYNQ',
)
#定义px4板
class px4(Board):
abstract = True
toolchain = 'arm-none-eabi'
def __init__(self):
# bootloader name: a file with that name will be used and installed
# on ROMFS
super(px4, self).__init__()
self.bootloader_name = None
# board name: it's the name of this board that's also used as path
# in ROMFS: don't add spaces
self.board_name = None
# px4io binary name: this is the name of the IO binary to be installed
# in ROMFS
self.px4io_name = None
# board-specific init script: if True a file with `board_name` name will
# be searched for in sources and installed in ROMFS as rc.board. This
# init script is used to change the init behavior among different boards.
self.board_rc = False
# Path relative to the ROMFS directory where to find a file with default
# parameters. If set this file will be copied to /etc/defaults.parm
# inside the ROMFS
self.param_defaults = None
self.ROMFS_EXCLUDE = []
# use ardupilot version of px_uploader.py
os.environ['UPLOADER'] = os.path.realpath(os.path.join(os.path.dirname(__file__), 'px_uploader.py'))
def configure(self, cfg):
if not self.bootloader_name:
cfg.fatal('configure: px4: bootloader name is required')
if not self.board_name:
cfg.fatal('configure: px4: board name is required')
super(px4, self).configure(cfg)
cfg.load('px4')
def configure_env(self, cfg, env):
super(px4, self).configure_env(cfg, env)
env.DEFINES.update(
CONFIG_HAL_BOARD = 'HAL_BOARD_PX4',
HAVE_OCLOEXEC = 0,
HAVE_STD_NULLPTR_T = 0,
)
env.CXXFLAGS += [
'-Wlogical-op',
'-Wframe-larger-than=1300',
'-fsingle-precision-constant',
'-Wno-attributes',
'-Wno-error=double-promotion',
'-Wno-error=missing-declarations',
'-Wno-error=float-equal',
'-Wno-error=undef',
'-Wno-error=cpp',
]
env.AP_LIBRARIES += [
'AP_HAL_PX4',
]
env.GIT_SUBMODULES += [
'PX4Firmware',
'PX4NuttX',
'uavcan',
]
if sys.platform == 'cygwin':
env.CXXFLAGS += ['-DCYGWIN_BUILD']
env.ROMFS_EXCLUDE = self.ROMFS_EXCLUDE
env.PX4_BOOTLOADER_NAME = self.bootloader_name
env.PX4_BOARD_NAME = self.board_name
env.PX4_BOARD_RC = self.board_rc
env.PX4_PX4IO_NAME = self.px4io_name
env.PX4_PARAM_DEFAULTS = self.param_defaults
env.PX4_RC_S_SCRIPT = 'init.d/rcS'
env.AP_PROGRAM_AS_STLIB = True
def build(self, bld):
super(px4, self).build(bld)
bld.ap_version_append_str('NUTTX_GIT_VERSION', bld.git_submodule_head_hash('PX4NuttX', short=True))
bld.ap_version_append_str('PX4_GIT_VERSION', bld.git_submodule_head_hash('PX4Firmware', short=True))
bld.load('px4')
def romfs_exclude(self, exclude):
self.ROMFS_EXCLUDE += exclude
#定义px4_v1板
class px4_v1(px4):
name = 'px4-v1'
def __init__(self):
super(px4_v1, self).__init__()
self.bootloader_name = 'px4fmu_bl.bin'
self.board_name = 'px4fmu-v1'
self.px4io_name = 'px4io-v1'
self.romfs_exclude(['oreoled.bin'])
#定义px4_v2板
class px4_v2(px4):
name = 'px4-v2'
def __init__(self):
super(px4_v2, self).__init__()
self.bootloader_name = 'px4fmuv2_bl.bin'
self.board_name = 'px4fmu-v2'
self.px4io_name = 'px4io-v2'
self.romfs_exclude(['oreoled.bin'])
self.with_uavcan = True
#定义px4_v3板
class px4_v3(px4):
name = 'px4-v3'
def __init__(self):
super(px4_v3, self).__init__()
self.bootloader_name = 'px4fmuv2_bl.bin'
self.board_name = 'px4fmu-v3'
self.px4io_name = 'px4io-v2'
self.with_uavcan = True
#定义skyviper_v2450_px4板
class skyviper_v2450_px4(px4_v3):
name = 'skyviper-v2450-px4'
def __init__(self):
super(skyviper_v2450_px4, self).__init__()
self.px4io_name = None
self.param_defaults = '../../../Tools/Frame_params/SkyViper-2450GPS/defaults.parm'
def configure_env(self, cfg, env):
super(skyviper_v2450_px4, self).configure_env(cfg, env)
env.DEFINES.update(
TOY_MODE_ENABLED = 'ENABLED',
USE_FLASH_STORAGE = 1,
ARMING_DELAY_SEC = 0,
LAND_START_ALT = 700,
HAL_RCINPUT_WITH_AP_RADIO = 1,
LAND_DETECTOR_ACCEL_MAX = 2,
CYRF_SPI_PX4_SPI_BUS = 2,
CYRF_SPI_PX4_SPIDEV_EXT = '(spi_dev_e)1',
CYRF_IRQ_INPUT = '(GPIO_INPUT|GPIO_FLOAT|GPIO_EXTI|GPIO_PORTD|GPIO_PIN15)',
)
env.PX4_RC_S_SCRIPT = 'init.d/rcS_no_microSD'
env.BUILD_ABIN = True
#定义px4_v4板
class px4_v4(px4):
name = 'px4-v4'
def __init__(self):
super(px4_v4, self).__init__()
self.bootloader_name = 'px4fmuv4_bl.bin'
self.board_name = 'px4fmu-v4'
self.romfs_exclude(['oreoled.bin'])
self.with_uavcan = True
#定义px4_v5板,这个是自己添加
class px4_v5(px4):
name = 'px4-v5'
def __init__(self):
super(px4_v5, self).__init__()
self.bootloader_name = 'px4fmuv5_bl.bin'
self.board_name = 'px4fmu-v5'
self.romfs_exclude(['oreoled.bin'])
self.with_uavcan = True
#定义px4_v5板,这个是自己添加
#定义px4_v4pro板,这个是自己添加
class px4_v4pro(px4):
name = 'px4-v4pro'
def __init__(self):
super(px4_v4pro, self).__init__()
self.bootloader_name = 'px4fmuv4pro_bl.bin'
self.board_name = 'px4fmu-v4pro'
self.px4io_name = 'px4io-v2'
self.romfs_exclude(['oreoled.bin'])
self.with_uavcan = True
class aerofc_v1(px4):
name = 'aerofc-v1'
def __init__(self):
super(aerofc_v1, self).__init__()
self.bootloader_name = 'aerofcv1_bl.bin'
self.board_name = 'aerofc-v1'
self.romfs_exclude(['oreoled.bin'])
self.board_rc = True
self.param_defaults = '../../../Tools/Frame_params/intel-aero-rtf.param'