先要搞明白ardupilot是怎么实现飞行控制的?然后再看文件
1.建立两个基本坐标系:地理坐标系和载体坐标系,保证两个基本坐标系的正确转化
一般使用旋转矩阵实现坐标系转换:
四元数运算(q0123);欧拉角(XYZ轴-roll/pitch/yaw) ;方向余弦矩阵(9个系数)
2.主要姿态数据:重力,地磁,陀螺仪,加速度计,电子罗盘,
重力和地磁属于地理坐标系/陀螺仪和加速度计和罗盘属于载体坐标系;
这些数据由UAV上面的传感器测量出来,exp:加速度计->测量线速度
陀螺仪->测量角速度
3.怎么保证坐标系的正确转化?
偏航yaw由电子罗盘,地磁对比修正误差补偿得到;
pitch俯仰和roll横滚的修正由加速度计,重力对比修正误差得到;
保证两个坐标系正确转化后,利用陀螺仪积分运算得到载体坐标系的姿态数据;
经过PID控制给出一系列控制量,完成基于载体坐标系的稳定控制,
再反应到地理坐标系稳定控制,达到可观察的定高/偏航/翻滚/俯仰等动作;
4.导航姿态理论上可只用陀螺仪完成,但是由于陀螺仪积分过程中产生误差累积,以及
白噪声,温度偏差,需要进行修正补偿。
1.需要用加速度计在水平面对重力进行对比和补偿,
2.需要用电子罗盘在水平面的地磁方向修正陀螺仪的水平误差。
加速度计:测量地球上的重力加速度,如果uav沿z轴旋转,则无法感知;
电子罗盘:测量地球磁场方向,如果uav沿y轴旋转,则无法感知;
5.航姿系统的缺陷所在:磁场和重力场越正交效果越好,如果方向相同,例如南北极,
则AHRS(加速度计,磁场计,陀螺仪)无法正常工作,高纬度航线角越来越大;
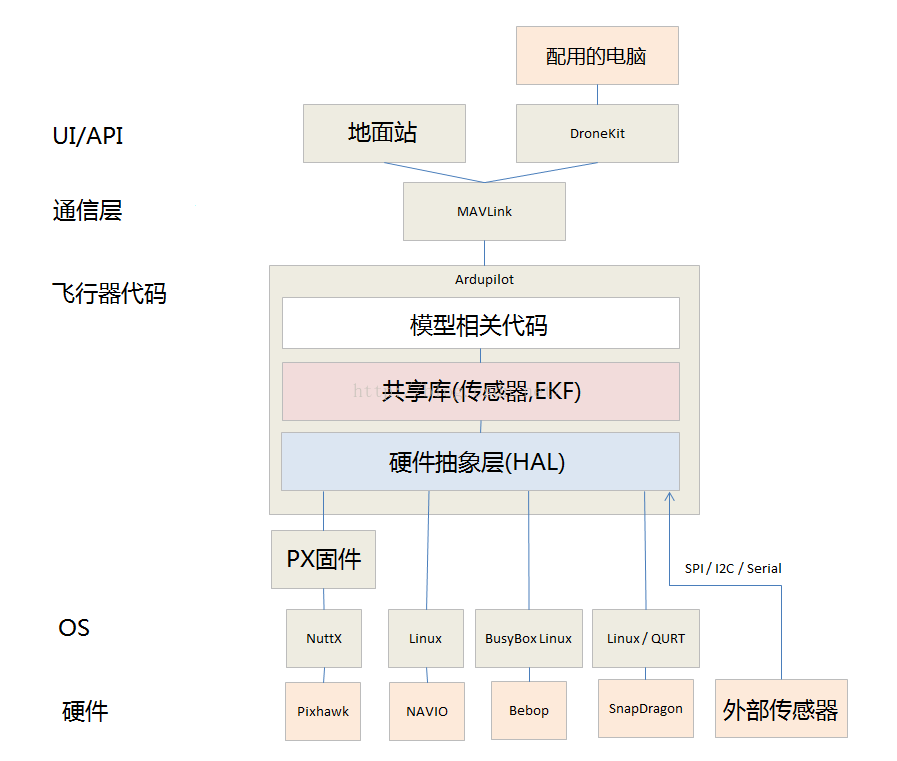
基本结构层次图:
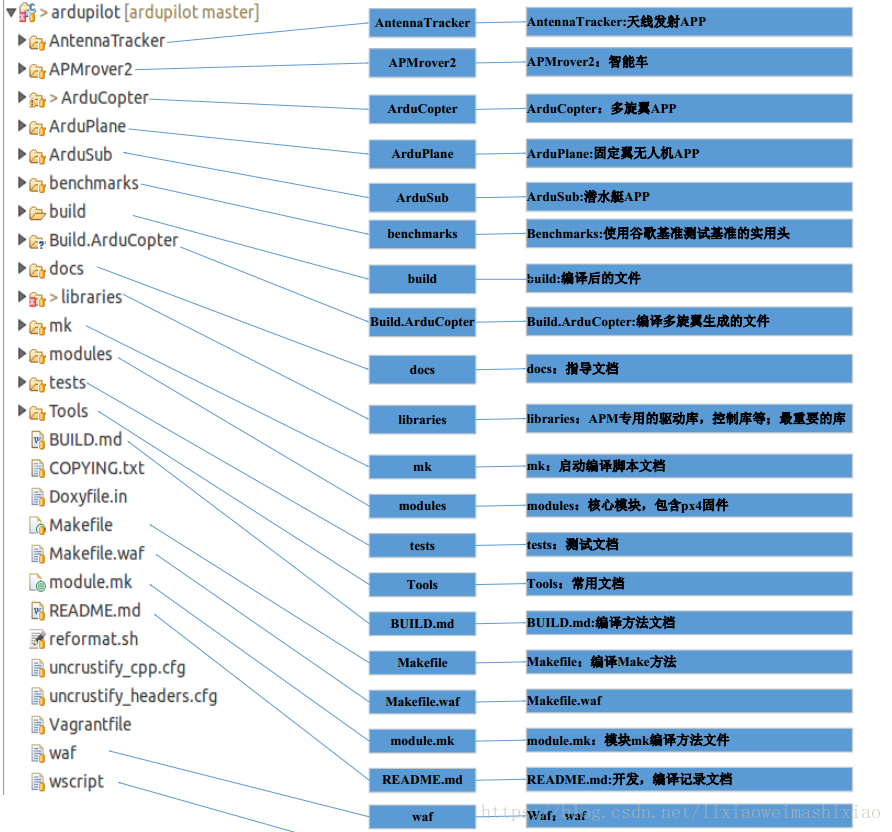
再看主要文件以及其功能介绍
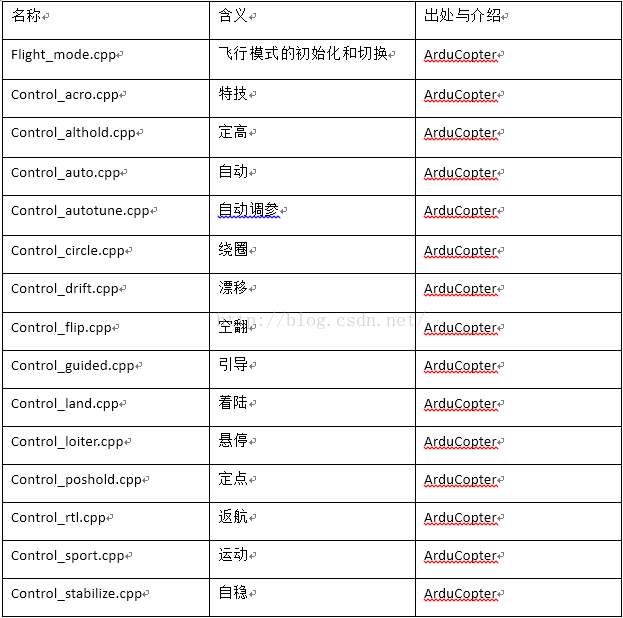
(1)飞行模式
(2)核心库
AP_AHRS:采用DCM(方向余弦矩阵方法)或EKF(扩展卡尔曼滤波方法)预估飞行器姿态。
AP_Common:所有执行文件(sketch格式,arduino IDE的文件)和其他库都需要的基础核心库。
AP_Math:包含了许多数学函数,特别对于矢量运算。
AC_PID:PID控制器库。
AP_InertialNav:扩展带有gps和气压计数据的惯性导航库。
AC_AttitudeControl:姿态控制相关库。
AP_WPNav:航点相关的导航库。
AP_Motors:多旋翼和传统直升机混合的电机库。
RC_Channel:更多的关于从APM_RC的PWM输入/输出数据转换到内部通用单位的库,比如角度。
AP_HAL,AP_HAL_AVR,AP_HAL_PX4:硬件抽象层库,提供给其他高级控制代码一致的接口,而不必担心底层不同的硬件。AP_HAL_PX4:GPIO、I2C、UART、RCinput/output、scheduler、semaphores、storage。
(3)传感器相关库
AP_InertialSensor:读取陀螺仪和加速度计数据,并向主程序执行标准程序和提供标准单位数据(deg/s,m/s)。
AP_RangerFinder:声呐和红外测距传感器的交互库
AP_Baro:气压计相关库
AP_GPS:GPS相关库
AP_Compass:三轴罗盘相关库
AP_OpticalFlow:光流传感器相关库
(4)其他库
AP_Mount,AP_Camera, AP_Relay:相机安装控制库,相机快门控制库
AP_Mission: 从eeprom(电可擦只读存储器)存储/读取飞行指令相关库
AP_Buffer:惯性导航时所用到的一个简单的堆栈(FIFO,先进先出)缓冲区
AP_AccelCal、AP_Declination、AP_RCMapper、AP_RPM、AP_RSSI
AP_ADC:Analog to Digital
APM_Control: pitch/roll/yaw controller
DataFlash:flash memory
GCS_Console/GCS_MAVLink:地面站通信、飞行日志

2.代码架构图:
参考:https://blog.csdn.net/qq_21842557/article/details/50815000