一、理论
混合高斯背景建模是基于像素样本统计信息的背景表示方法,利用像素在较长时间内大量样本值的概率密度等统计信息(如模式数量、每个模式的均值和标准差)表示背景,然后使用统计差分(如3σ原则)进行目标像素判断,可以对复杂动态背景进行建模,计算量较大。
在混合高斯背景模型中,认为像素之间的颜色信息互不相关,对各像素点的处理都是相互独立的。对于视频图像中的每一个像素点,其值在序列图像中的变化可看作是不断产生像素值的随机过程,即用高斯分布来描述每个像素点的颜色呈现规律【单模态(单峰),多模态(多峰)】。
对于多峰高斯分布模型,图像的每一个像素点按不同权值的多个高斯分布的叠加来建模,每种高斯分布对应一个可能产生像素点所呈现颜色的状态,各个高斯分布的权值和分布参数随时间更新。当处理彩色图像时,假定图像像素点R、G、B三色通道相互独立并具有相同的方差。对于随机变量 X 的观测数据集{ x1 , x2 ,…, xN }, xt =( rt , gt , bt )为 t 时刻像素的样本,则单个采样点 xt 其服从的混合高斯分布概率密度函数:
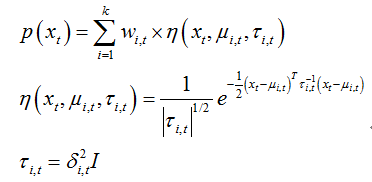
其中k为分布模式总数,η(xt,μi,t, τi,t)为t时刻第i个高斯分布,μi,t为其均值,τi,t为其协方差矩阵,δi,t为方差,I为三维单位矩阵,ωi,t为t时刻第i个高斯分布的权重。
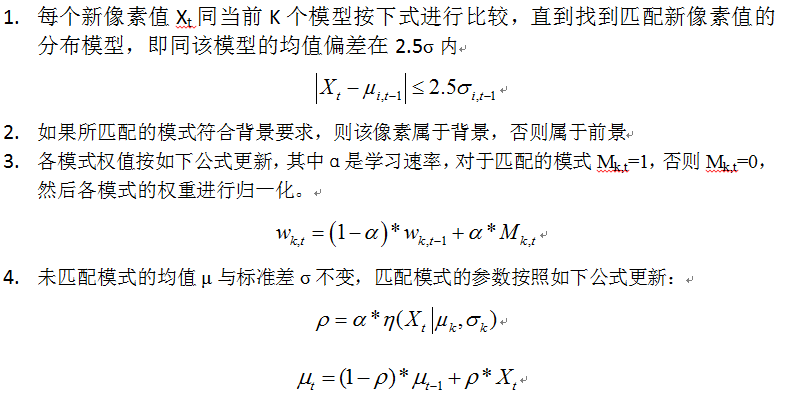
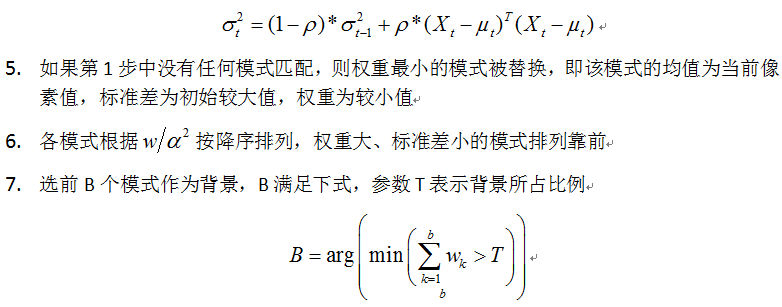
详细算法流程:
由于能力有限,代码来自实验室的师兄写的代码,我从中学到了很多内容。
//混合高斯背景建模
/*****************************************************************************************************
* File name: MixtureGaussian.cpp
* Author: source code by RamiYim
* Version: cs-hhu-cn0.0
* Date: 20150208
* Description: background modelling by mixture gaussian
* Others:
* Function List: mixtureGaussian();
* History: <rami>,<20150208>,<version>,<desc>
*
******************************************************************************************************/
/*
#include "cv.h"
#include "highgui.h"
#include <iostream>
using namespace std;
/*************************************************************************************************
Function:void mixtureGaussian()
Description:
Calls:
Called By:main()
Input:
Output:
Return:
Others:建立彩色的背景
Histroy:<author><time><version><desc>
<RamiYim><20150505><0.0><第一次创建函数>
***************************************************************************************************/
/*
void mixtureGaussianColor();
void mixtureGaussianGrey();
int main()
{
int i =0;
mixtureGaussianColor();
//mixtureGaussianGrey();
std::cout << i << endl;
return 0;
}
void mixtureGaussianColor()
{
//读入视频
CvCapture *capture = cvCreateFileCapture("E:\\新建文件夹\\cs.AVI");
IplImage *sourceFrame = cvQueryFrame(capture);
//创建背景帧和前景帧,并分配内存
IplImage *backgroundFrame = cvCreateImage(cvSize(sourceFrame->width, sourceFrame->height), IPL_DEPTH_8U, 3);
IplImage *foregroundFrame = cvCreateImage(cvSize(sourceFrame->width, sourceFrame->height), IPL_DEPTH_8U, 3);
/*----------------初始化各种变量--------------*/
/*
int liv_componets = 4; //高斯分布个数number of gaussian components (typically 3-5)
int liv_backgroundComponents = 4; //背景分布个数number of background components
int liv_stdDeviation = 6; //初始标准差initial standard deviation (for new components) var = 36 in paper
double lfv_alph = 0.01; //学习速率a learning rate (between 0 and 1) (from paper 0.01)
double lfv_lamda = 2.5; //偏差阈值λ positive deviation threshold
double lfv_thresh = 0.25; //前景阈值 foreground threshold (0.25 or 0.75 in paper)
//初始rho,用于更新均值和标准差
double lfv_rho = lfv_alph / (1 / liv_componets); //initial rho variable (used to update lpv_mean and lpv_std)
//初始化高度宽度,步长
int liv_height = sourceFrame->height;
int liv_width = sourceFrame->width;
int liv_widthStep = sourceFrame->widthStep;
/*-------------------申请空间,分配内存-----------*/
/*
//foreground array 前景数组
uchar *lpv_foregroundImageData = (uchar *) malloc(sizeof(char) * liv_height * liv_widthStep);
//background array 背景数组
uchar *lpv_backgroundImageData = (uchar *) malloc(sizeof(char) * liv_height * liv_widthStep);
//lpv_weights array 权值数组
double *lpv_weights = (double *) malloc(sizeof(double) * liv_height * liv_widthStep * liv_componets);
//pixel means 像素均值
double *lpv_mean = (double *) malloc(sizeof(double) * liv_height * liv_widthStep * liv_componets);
//pixel standard deviations 像素标准差
double *lpv_std = (double *) malloc(sizeof(double) * liv_height * liv_widthStep * liv_componets);
//difference of each pixel from lpv_mean
double *lpv_uDiff = (double *) malloc(sizeof(double) * liv_height * liv_widthStep * liv_componets);
//lpv_rank of components (weights / lpv_std)
//double *lpv_rank = (double *) malloc(sizeof(double) * liv_componets);
int *lpv_rankIndex = (int *) malloc(sizeof(int) * liv_componets);
// 为均值、标准差、权重赋初值
//opencv中c的rng类可以压缩一个64位的i整数并可以得到scalar和array的随机数。
//目前的版本支持均匀分布随机数和gaussian分布随机数。
CvRNG state; //初始化随机数生成器状态
for (int i = 0; i < liv_height; i++)
{
for (int j = 0; j < liv_widthStep; j++)
{
for(int k = 0; k < liv_componets; k++)
{
// 每一个高斯分量的下标
int liv_eachCompoent = i * liv_widthStep * liv_componets + j * liv_componets + k;
// 每一个通道的下标
int liv_eachChannels = i * liv_widthStep + j;
// 初始化均值、标准差、权重
lpv_mean[liv_eachCompoent] = cvRandReal(&state) * 255;
lpv_std[liv_eachCompoent] = liv_stdDeviation;
lpv_weights[liv_eachCompoent] = (double)1 / liv_componets;
}
}
}
while(sourceFrame = cvQueryFrame(capture))
{
for (int i = 0; i < liv_height; i++)
{
for (int j = 0; j < liv_widthStep; j++)
{
// 用于判断是否有高斯分量相匹配
int liv_match = 0;
float lfv_weightTotal = 0;
// 每一个通道的下标
int liv_eachChannel = i * liv_widthStep + j;
for (int k = 0; k < liv_componets; k++)
{
// 每一个高斯分量的下标
int liv_eachCompoent = i * liv_widthStep * liv_componets + j * liv_componets + k;
// 每一个高斯分量与其相对应通道的差值数组 |I-u|
lpv_uDiff[liv_eachCompoent] = abs((uchar)sourceFrame->imageData[liv_eachChannel]- lpv_mean[liv_eachCompoent]);
//匹配的
// |I-u| < lamda * std 时认为该像素是背景,需更新
if (lpv_uDiff[liv_eachCompoent] < lfv_lamda * lpv_std[liv_eachCompoent])
{
liv_match = 1; //liv_match变成了1
// 更新高斯分量权重, w = (1 - alph) * weights + alph * M (M = 1)
lpv_weights[liv_eachCompoent] = (1 - lfv_alph) * lpv_weights[liv_eachCompoent] + lfv_alph;
lfv_rho = lfv_alph / lpv_weights[liv_componets];
//更新高斯分量期望 u = (1 - rho) * u + rho * I
lpv_mean[liv_eachCompoent] = (1 - lfv_rho) * lpv_mean[liv_eachCompoent] + lfv_rho * (uchar)sourceFrame->imageData[liv_eachChannel];
//更新高斯分量标准差std = sqrt((1 - rho) * std^2 + rho * (I - u)^2)
lpv_std[liv_eachCompoent] = sqrt((1 - lfv_rho) * pow(lpv_std[liv_eachCompoent], 2)
+ lfv_rho * pow((uchar)sourceFrame->imageData[liv_eachChannel] - lpv_mean[liv_eachCompoent], 2));
}
//未匹配的 M=0,这个时候均值和方差不变
else
{
// 更新高斯分量权重, w = (1 - alph) * weights + alph * M(M = 0)
// weight slighly decreases
lpv_weights[liv_eachCompoent] = (1 - lfv_alph) * lpv_weights[liv_eachCompoent];
}
//权重总和
lfv_weightTotal += lpv_weights[liv_eachCompoent];
} // end for (int k = 0; k < liv_componets; k++)
// 归一化权值
for (int k = 0; k < liv_componets; k++)
{
// 每一个高斯分量的下标
int liv_eachCompoent = i * liv_widthStep * liv_componets + j * liv_componets + k;
//归一化权值,权值变为权值除以总的权值
lpv_weights[liv_eachCompoent] = lpv_weights[liv_eachCompoent] / lfv_weightTotal;
}
// 背景提取
lpv_backgroundImageData[liv_eachChannel] = 0;
for (int k = 0; k < liv_componets; k++)
{
// 每一个高斯分量的下标
int liv_eachCompoent = i * liv_widthStep * liv_componets + j * liv_componets + k;
//背景数组=归一化的权值*均值
lpv_backgroundImageData[liv_eachChannel] += lpv_weights[liv_eachCompoent] * lpv_mean[liv_eachCompoent];
}
//处理过后的背景数组里面的数据指回背景帧内存空间
backgroundFrame->imageData[liv_eachChannel] = lpv_backgroundImageData[liv_eachChannel];
//没有一个高斯分量匹配的
// 如果没有高斯分量匹配,则将权值最小的替换,即该高斯分量的均值变为当前像素值,标准差为初始较大值,权重为较小值
if (liv_match == 0)
{
// 最小权值下标
int liv_minWeightsIndex = 0;
// 权值最小的值,初始值为第一个高斯分量值
float lfv_minWeights = lpv_weights[i * liv_widthStep * liv_componets + j * liv_componets + liv_minWeightsIndex];
//找出最小的权值lfv_minWeights,以及最小权值的下标liv_minWeightsIndex
for (int k = 0; k < liv_componets; k++)
{
int liv_eachCompoent = i * liv_widthStep * liv_componets + j * liv_componets + k;
if (lpv_weights[liv_eachCompoent]< lfv_minWeights)
{
lfv_minWeights = lpv_weights[liv_eachCompoent];
liv_minWeightsIndex = k;
}
}
//当前最小权值的高斯分量的均值变为当前像素值
lpv_mean[i * liv_widthStep * liv_componets + j * liv_componets + liv_minWeightsIndex] = (uchar)sourceFrame->imageData[liv_eachChannel];
//最小权值的高斯分量的标准差是初始的标准差值
lpv_std[i * liv_widthStep * liv_componets + j * liv_componets + liv_minWeightsIndex] = liv_stdDeviation;
}
} // end (int j = 0; j < liv_widthStep; j++)
} // end for (int i = 0; i < liv_height; i++)
cvShowImage("source", sourceFrame);
cvShowImage("background", backgroundFrame);
char s = cvWaitKey(1);
if(s == 27) break;
} // end while(sourceFrame = cvQueryFrame(capture))
}
/*************************************************************************************************
Function:void mixtureGaussianGrey()
Description:
Calls:
Called By:main()
Input:
Output:
Return:
Others:从金圣韬博客copy过来,建立灰度背景
Histroy:<author><time><version><desc>
<RamiYim><20150208><0.0><第一次创建函数>
***************************************************************************************************/
/*
void mixtureGaussianGrey()
{
CvCapture *capture = cvCreateFileCapture("D:\\VideoData\\SDC11945.AVI");
IplImage *lpv_sourceFrame = cvQueryFrame(capture);
//当前,单通道
IplImage *current = cvCreateImage(cvSize(lpv_sourceFrame->width, lpv_sourceFrame->height), IPL_DEPTH_8U, 1);
//前景帧,单通道
IplImage *lpv_foregroundFrame = cvCreateImage(cvSize(lpv_sourceFrame->width, lpv_sourceFrame->height), IPL_DEPTH_8U, 1);
//背景帧,单通道
IplImage *lpv_backgroundFrame = cvCreateImage(cvSize(lpv_sourceFrame->width, lpv_sourceFrame->height), IPL_DEPTH_8U, 1);
//设置参数
int liv_componets = 4; //number of gaussian components (typically 3-5)
int liv_backgroundComponents = 4; //number of background components
int liv_stdDeviation = 6; //initial standard deviation (for new components) var = 36 in paper
double alph = 0.01; //learning rate (between 0 and 1) (from paper 0.01)
double lamda = 2.5; //positive deviation threshold
double thresh = 0.25; //foreground threshold (0.25 or 0.75 in paper)
double rho = alph / (1 / liv_componets); //initial rho variable (used to update lpv_mean and lpv_std)
int width = current->widthStep;
int height = current->height;
//申请空间,分配内存
int *lpv_foregroundImageData = (int *) malloc(sizeof(int) * width * height); //foreground array
int *lpv_backgroundImageData = (int *) malloc(sizeof(int) * width * height); //background array
double *lpv_weights = (double *) malloc(sizeof(double) * width * height * liv_componets);//lpv_weights array
double *lpv_mean = (double *) malloc(sizeof(double) * width * height * liv_componets); //pixel means
double *lpv_std = (double *) malloc(sizeof(double) * width * height * liv_componets); //pixel standard deviations
double *u_diff = (double *) malloc(sizeof(double) * width * height * liv_componets); //difference of each pixel from lpv_mean
////lpv_rank of components (weights / lpv_std)
//分布的排序,按照weights / lpv_std排序
double *lpv_rank = (double *) malloc(sizeof(double) * 1 * liv_componets);
//排序的序列号
int *rank_index = (int *) malloc(sizeof(int) * liv_componets);
CvRNG state;
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++)
{
for(int k = 0; k < liv_componets; k++)
{
lpv_mean[i * width * liv_componets + j * liv_componets + k] = cvRandReal(&state) * 255;
lpv_weights[i * width * liv_componets + j * liv_componets + k] = (double)1 / liv_componets;
lpv_std[i * width * liv_componets + j * liv_componets + k] = liv_stdDeviation;
}
}
}
while(lpv_sourceFrame = cvQueryFrame(capture))
{
//转灰度图像,当前帧图像lpv_sourceFrame,变成灰度图像current
cvCvtColor(lpv_sourceFrame, current, CV_BGR2GRAY);
//update gaussian components for each pixel
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++)
{
int match = 0;
double temp = 0; //权重总和初始值0
for(int k = 0; k < liv_componets; k++)
{
//calculate difference of pixel values from lpv_mean
u_diff[i * width * liv_componets + j * liv_componets + k] = abs((uchar)current->imageData[i * width + j]
- lpv_mean[i * width * liv_componets + j * liv_componets + k]);
if (abs(u_diff[i * width * liv_componets + j * liv_componets + k]) <= lamda * lpv_std[i * width * liv_componets + j * liv_componets + k])//pixel matches component
{
match = 1; // variable to single component match
//update lpv_weights, lpv_mean, lpv_std, rho
lpv_weights[i * width * liv_componets + j * liv_componets + k] = (1 - alph) * lpv_weights[i * width * liv_componets + j * liv_componets + k] + alph;
rho = alph / lpv_weights[i * width * liv_componets + j * liv_componets + k];
lpv_mean[i * width * liv_componets + j * liv_componets + k] = (1 - rho) * lpv_mean[i * width * liv_componets + j * liv_componets + k]
+ rho * (uchar)current->imageData[i * width + j];
lpv_std[i * width * liv_componets + j * liv_componets + k] = sqrt((1 - rho) * (lpv_std[i * width * liv_componets + j * liv_componets + k]
* lpv_std[i * width * liv_componets + j * liv_componets + k]) + rho * (pow((uchar)current->imageData[i * width + j]
- lpv_mean[i * width * liv_componets + j * liv_componets + k], 2)));
}
else
{
lpv_weights[i * width * liv_componets + j * liv_componets + k] = (1 - alph)
* lpv_weights[i * width * liv_componets+ j * liv_componets + k];// weight slighly decreases
}
//计算出权重的总和
temp += lpv_weights[i * width * liv_componets + j * liv_componets + k];
} //end for(int k = 0; k < liv_componets; k++)
//归一化权值
for(int k = 0; k < liv_componets; k++)
{
lpv_weights[i * width * liv_componets + j * liv_componets + k] = lpv_weights[i * width * liv_componets + j * liv_componets + k] / temp;
}
//temp值为第一个高斯分布的归一化之后的权值总和
temp = lpv_weights[i * width * liv_componets + j * liv_componets];
lpv_backgroundImageData[i * width + j] = 0;
int min_index = 0;
for (int k = 0; k < liv_componets; k++)
{
//背景数据=归一化后的权值*均值
lpv_backgroundImageData[i * width + j] = lpv_backgroundImageData[i * width + j]
+ lpv_weights[i * width * liv_componets + j * liv_componets + k] * lpv_mean[i * width * liv_componets + j * liv_componets + k];
//找出权值最小的高斯分布还有它的下标值
if (lpv_weights[i * width * liv_componets + j * liv_componets + k] <= temp)
{
min_index = k;
temp = lpv_weights[i * width * liv_componets + j * liv_componets + k];
}
}
//背景数据指回它对应的数据块
lpv_backgroundFrame->imageData[i * width + j] = (uchar)lpv_backgroundImageData[i * width + j];
//如果没有任何模式匹配的情况
//if no components match, create new component
if (match == 0)
{
lpv_mean[i * width * liv_componets + j * liv_componets + min_index] = (uchar)current->imageData[i * width + j];
lpv_std[i * width * liv_componets + j * liv_componets + min_index] = liv_stdDeviation;
}
for (int k = 0; k < liv_componets; k++)
{
rank_index[k] = k;
lpv_rank[k] = lpv_weights[i * width * liv_componets + j * liv_componets + k] / lpv_std[i * width * liv_componets + j * liv_componets + k];
}
//sort lpv_rank values
int rand_temp = 0, rank_index_temp = 0;
//冒泡排序
//各模式按照降序排列
for (int k = 1; k < liv_componets; k++)
{
for (int m = 0; m < k; m++)
{
if (lpv_rank[k] > lpv_rank[m])
{
// swap max values
rand_temp = lpv_rank[m];
lpv_rank[m] = lpv_rank[k];
lpv_rank[k] = rand_temp;
// swap max index values
rank_index_temp = rank_index[m];
rank_index[m] = rank_index[k];
rank_index[k] = rank_index_temp;
}
}
}
// calculate foreground
match = 0; int k = 0;
// lpv_foregroundFrame->imageData[i * width + j] = 0;
while ((match == 0) && (k < liv_backgroundComponents))
{
//选择前B个作为背景,B=arg(min(权值和>阈值))
if (lpv_weights[i * width * liv_componets + j * liv_componets + rank_index[k]] >= thresh)
{
if (abs(u_diff[i * width * liv_componets + j * liv_componets + rank_index[k]]) <=
lamda * lpv_std[i * width * liv_componets + j * liv_componets + rank_index[k]])
{
lpv_foregroundFrame->imageData[i * width + j] = 0; //背景,即前景中黑色部分,
match = 1;
}
else
{
lpv_foregroundFrame->imageData[i * width + j] = (uchar)current->imageData[i * width + j];
}
}
k = k + 1;
}
} // end for (int j = 0; j < width; j++)
} // end for (int i = 0; i < height; i++)
cvShowImage("source", lpv_sourceFrame);
cvShowImage("fore",lpv_foregroundFrame);
cvShowImage("back",lpv_backgroundFrame);
char s = cvWaitKey(1);
if(s == 27) break;
} // end while
free(rank_index);
free(lpv_foregroundImageData);
free(lpv_weights);
free(lpv_mean);
free(lpv_std);
free(u_diff);
free(lpv_rank);
cvReleaseCapture(&capture);
cvDestroyWindow("fore");
cvDestroyWindow("back");
}
*/
