本文是自己学习David Silver课程的学习笔记:原视频可以在油管或者B站上搜到。
PPT的连接如下:http://www0.cs.ucl.ac.uk/staff/D.Silver/web/Teaching.html。网速慢的话可以点击这里。
Dynamic :我们认为问题是拥有某种时间或者顺序方面的特性。
Programming:这里我们讨论的是数学规划,就像是线性规划,或者是二次规划。
动态规划能够帮助我们解决一些复杂的问题,就是将复杂的问题分解成子问题,然后去解决这些子问题,将这些子问题的答案结合起来,最终得到原问题的答案。
使用动态规划的方法需要满足两个特性:
1.最优结构:最优化原理,说的是我们可以将某些整体性问题,分解成两个或者多个的子问题,子问题的最优解也就是整体的最优解。简要来说就是整个优化问题可以分解为多个子优化问题。
2.重复的问题:子问题是重复的,这样我们就可以不断重复获得子优化问题的解,使得我们可以将子优化问题的解重复利用。
马尔可夫决策过程是满足动态规划的两个条件的,除此之外,马尔可夫决策过程也满足贝尔曼方程。贝尔曼方程就是递归组合,其中我们将最优值函数拆分两部分,第一步是最优行为,以及在此之后的最优行为。你可以理解为目前的一步行动是最好的,余下的其它步骤也将采取最优的行动,这些就组成了整体的最优值。
我们可以认为Value function就是缓存目前我们所找到MDP的最优值信息。通过value function 我们可以找到从任一状态出发的解决方案。通过value function函数,我们可以找到最优的行动方式。并以那个状态为起点,得到最大奖励。一旦你得到了最优奖励,就可以进行回溯。
这里我们说两个特殊案例的解决方案:

预测问题:
这个问题就是我们知道了一个标准的MDP,我们同时也知道了Policy。我想知道我将会得到多少奖励?针对这个问题,我们需要求解的就是value function,通过value function,我们就可以得到我们能获得的最大奖励是多少。实际上这也是policy评估,通过他我们能知道policy的效果如何。
控制问题:
在这个问题中我们也是知道了MDP的所有信息,像Atari游戏,我们需要知道游戏内部所有的数据,每一步将要产生的数据我们都知道,我们现在想做的就是控制这个游戏,但是我们并不知道policy。我们想知道的是最好的策略是什么?我们想要知道在所有的策略中我们选择哪一个才能得到最多的奖励。也就是找一个最好的状态到动作的映射。
Policy Evaluation

上节课我们是得到了状态值函的计算公式,状态s处的值函是是可以利用后继的值函数V(s')来表示的。通过高斯-赛德尔迭代算法,我们就可以对其进行求解,求解结果如上图中的公式所示。上面这个方程代表的是值函数的期望形式。
向前看一步,我们向前看的是下一个状态的值。采用贝尔曼方程,每当我们向前看一步,那么我们就得到了下个状态的值,我们所有可能采取的动作都考虑进去,得到接下来的状态,我们考虑这些连续状态的value,在得到下个时刻每一个状态的概率之后,我们将其备份,这样我们就知道了路径上的value值和其对应概率了。
之后的话我们就可以对其进行计算代。我们在叶节点存储我们先前的迭代value。以便我们求得下一次迭代的value,也就是我们想要得到value函数。我们需要最近一次迭代k,将k迭代产生的值带入方程中,得到叶节点的值。通过这些值,我们就能计算出下一次迭代所产生的一个新的value。我们对每个状态都做上述操作,我们就可以将所有状态进行更新求解。
下面举个例子说明一下:
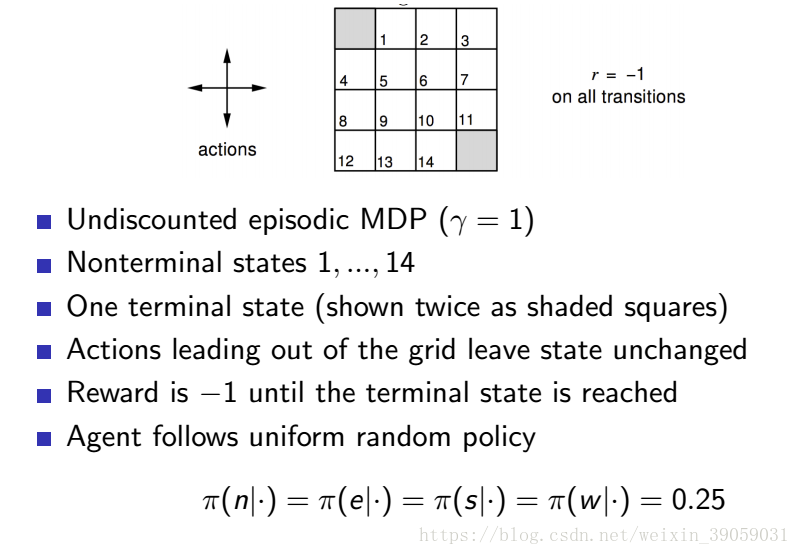
上图是游戏的机制:我们对其迭代求解有:
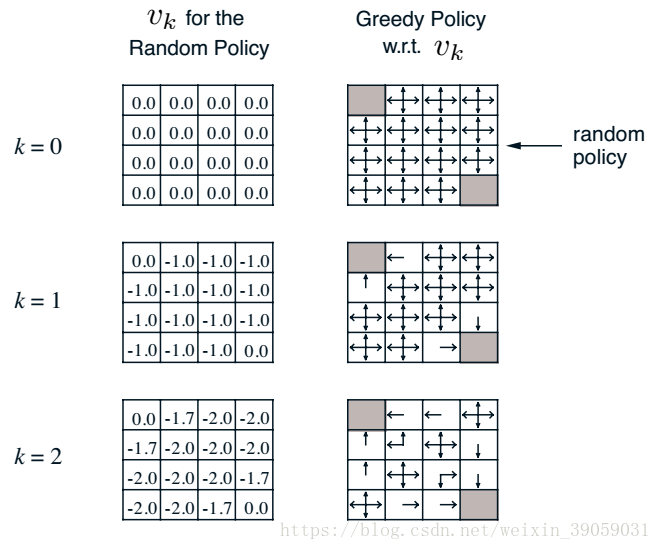

渐渐地,我们发现值函数最终会收敛,也就是当我们策略随机的时候,我们最终到达终点的步长将会是20左右。右侧的表格就是我们在知道value 函数之后构建的新的policy。如果我们忽略右侧的表格,我们可以通过这种策略迭代的方法知道目前我所使用的policy的value。这种方法实际上就是在迭代贝尔曼方程。
Policy Iteration
之前我们采取Policy Evaluation的方法能够去评估一个policy。现在我们想要在MDP过程中,寻找一个尽可能好的policy。我们想通过反馈的方式来将其实现。假设某人已近给了你一个policy,你怎么样才能返回一个policy,确保这个policy比原来那个要好。
我们将这个过程分成两部分,第一部分我们将评估这个给定policy的value函数,就像我们在上面policy evaluatioin说的那样,给定一个随机策略,然后更新我们的value函数。第二部分我们依据value函数来改进我们的策略,这里大多数是采用贪心算法(大部分动作的选择采取值函数最大的那一个,小部分采取随机选择)。我们通过第一部分->第二部分->第一部分····这样迭代之后,我们就将会寻找到一个最优的策略。
上面的问题概括起来的话就是下面这张图片:

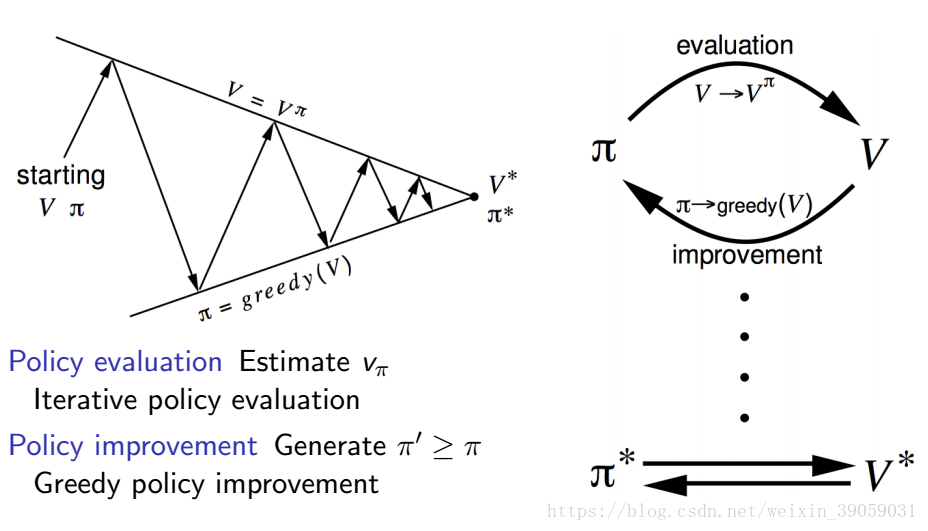
那么我们现在就推到一下整个策略迭代将会收敛,如下图所示:
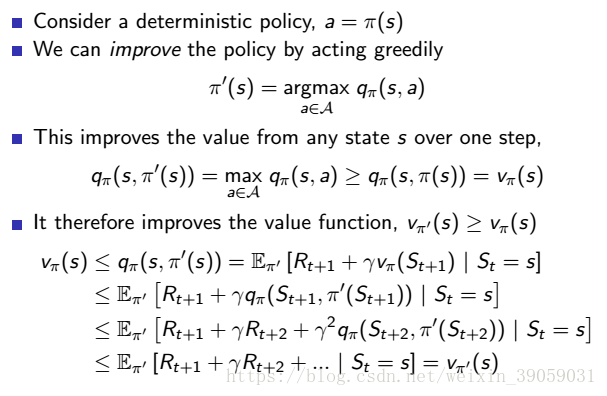
我们采用贪婪策略,每次都选取能获得最大价值的那个动作,那么我们得到的奖励至少是和之前的奖励一样大的。通过这样的一次一次迭代之后,我们将会得到一个最优解。
Value Iteration
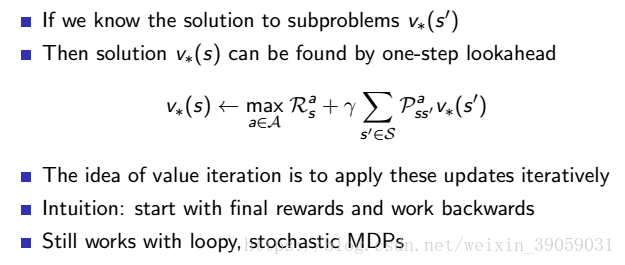
和策略迭代一样,值函是迭代也是通过回溯的方式来更新整个值函数的。和policy iteration不同的是,我们每一步并不会使用一个已近确定下来的policy,我们只会直接作用于value空间。只有value函数的迭代。
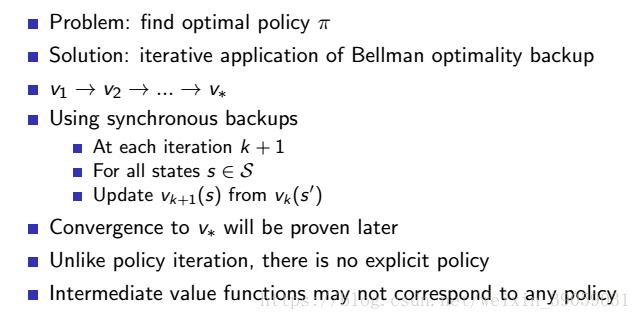
算法的更新过程如下图所示:

其实跟策略迭代没啥多大区别,一个是把动作加进去取max,一个是还没有加动作取max。
证明策略评估的收敛性
在这里我们采用压缩映射(Contraction Mapping)的方法对其实现证明。这个概念在泛函数分析里面有。涉及不动点理论。可以在以下链接中找到一些泛函数分析的教程。
在开始之前我们得先说一下压缩映像:
定义:设是完备的距离空间,
,如果对于任意的
,不等式:
成立,其中
,则存在唯一的
使得
。
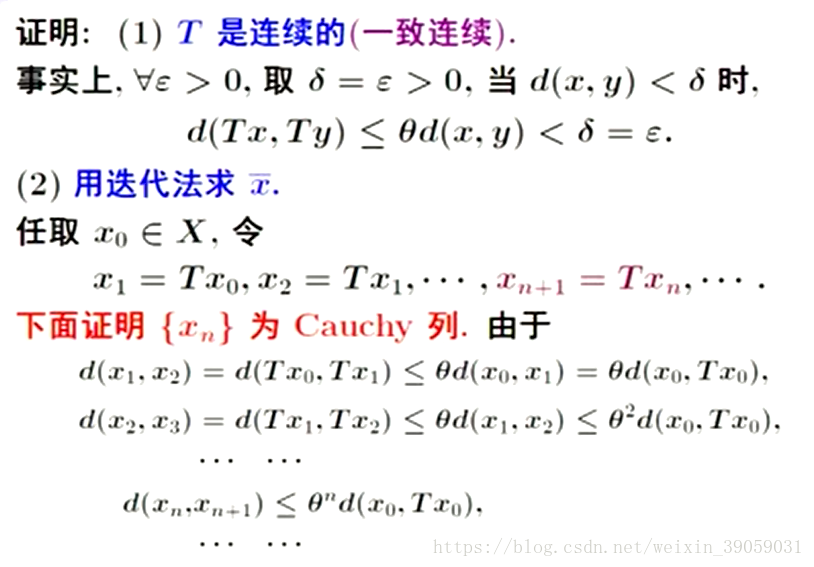
证明:要证明上述定义,我们分两步走,我们先找到的不动点,再证明唯一性。
从公式 中我们可以看到
作用之后,两点间的距离成比例地压缩了,是一压缩映像,我们希望用迭代的方法找到不动点。
任意取,令:
······
······。
开始我们取的x是随机的,如果我们能够证明是收敛的,
连续,则可以推出
。


从以上证明的话我们可以知道,在完备度量空间上的压缩映射具有唯一不动点。也就是说,从度量空间任何一点出发,只要满足压缩序列,压缩序列必定会收敛到唯一不动点。因此证明一个迭代序列是不是收敛,只要证明该序列所对应的映射是不是压缩映射就可以了。
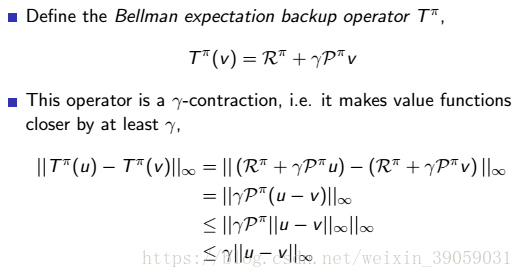
证明迭代值函数的映射为压缩映射:
选取无穷范数为度量: