版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/ktigerhero3/article/details/80927310
按照以下程序发送消息,
#include <ros/ros.h>
#include <ros/console.h>
#include <std_msgs/Int32.h>
#include <geometry_msgs/Vector3.h>
#include<iostream>
using namespace std;
int main( int argc, char **argv )
{
ros::init( argc, argv, "plottest" );
ros::NodeHandle n;
ros::Publisher pub_temp = n.advertise< std_msgs::Int32 >( "temp", 1000 );
ros::Publisher pub_accel = n.advertise< geometry_msgs::Vector3 >( "accel", 1000 );
std_msgs::Int32 msg_temp;
geometry_msgs::Vector3 msg_accel;
int i = 0;
ros::Rate rate( 1 );
while( ros::ok() ) {
msg_temp.data = i;
msg_accel.x = 0.1 * i;
msg_accel.y = 0.2 * i;
msg_accel.z = 0.3*i;
pub_temp.publish( msg_temp );
pub_accel.publish( msg_accel );
std::cout<<"i="<<i<<endl;
++i;
ros::spinOnce();
rate.sleep();
}
return EXIT_SUCCESS;
}运行
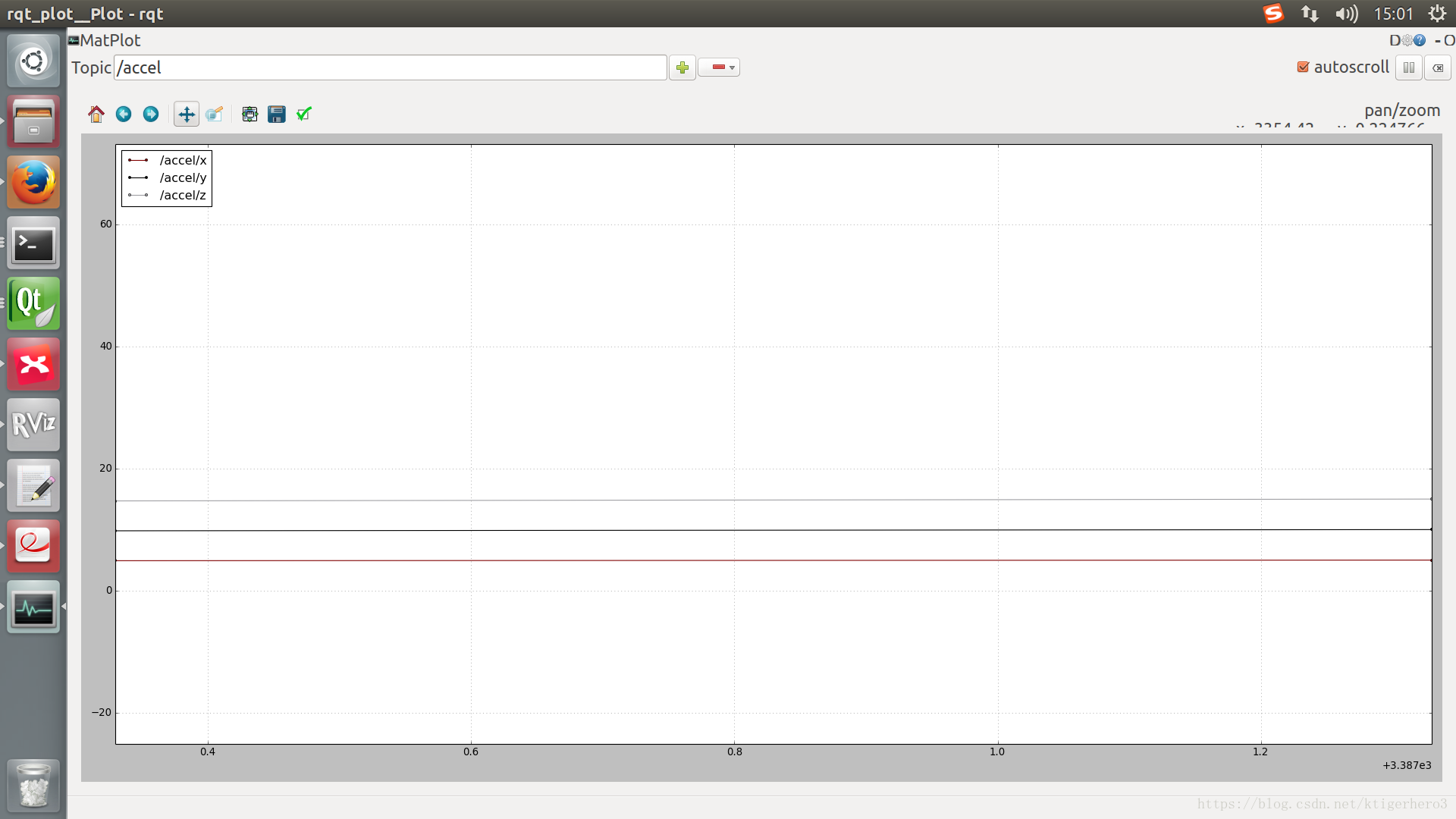
rosrun rqt_plot rqt_plot打开rqt_plot
在topic中输入订阅的topic
如图