版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/mobius_strip/article/details/79313105
1 矩阵
1.1 矩阵的定义及运算
1.1.1 矩阵的定义
矩阵是一个数表,由 m x n 个数排成的 m 行 n 列的数表
⎡⎣⎢⎢⎢⎢⎢a11a21⋮am1a12a22⋮am2⋯⋯⋱⋯a1na2n⋮amn⎤⎦⎥⎥⎥⎥⎥
称为一个m行n列的矩阵,
aij
为矩阵第i行j列的元素。
m=n时矩阵为方阵;只有
aii
不全为0的方阵叫对角阵;
aii
=1的对角阵为单位矩阵,记做I;元素都是0的矩阵为0矩阵。
1.1.2 线性方程组
{2x1+x2−x3x1+x3=1=−2
对应的系数矩阵为:
A=[2110−11]
对应的曾广矩阵为:
B=[2110−111−2]
1.1.3 矩阵的运算
| 运算 |
说明 |
| 同型矩阵 |
行列对应相等 |
| 矩阵相等 |
对应元素相同的同型矩阵 |
| 矩阵加法 |
同行矩阵才有定义,对应不元素相加 |
| 矩阵数乘 |
所有元素乘以对应的实数:kA = (k
aij
) |
| 矩阵乘法 |
Am×tBt×n=Cm×n=(cij)m×n
,其中
cij=∑tk=1aikbkj
|
| 矩阵等价 |
A通过初等变换得到B |
| 矩阵相似 |
A=M−1BM
|
1.2 矩阵的两个图
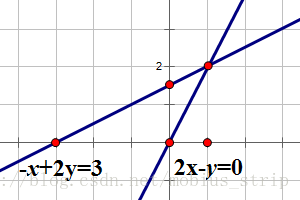
2x2矩阵
{2x−y=0−x+2y=3→[2−1−12][xy]=[03]x[2−1]+y[−12]=[03]→{x=1y=2
1.2.1 行图(row picture)
通过交点可以判断方程是否有解
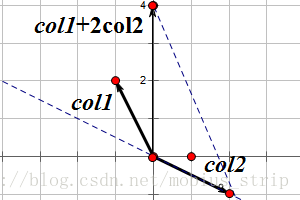
1.2.2 列图(column picture)
列向量的线性组合
1.2.3 行列运算
[col1col2col3]⎡⎣⎢abc⎤⎦⎥=a∗col1+b∗col2+c∗col3[abc]⎡⎣⎢row1row2row3⎤⎦⎥=a∗row21+b∗row2+c∗row3
1.3 消元法与LU分解
1.3.1 矩阵的初等变换
| ID |
初等行(列)变换 |
| 1 |
交换两行(列)的位置 |
| 2 |
用一非零数程昱某一行的所有元素 |
| 3 |
把矩阵的某一行(列)的适当倍数加到另一行(列)上去 |
经过初等变换后,将矩阵转化成阶梯形式,如果曾广矩阵有非零主元则方程无解;如果阶梯矩阵对应的系数部分主对角含零,则有无穷解;
初等矩阵:对单位矩阵做一次初等变换得到的矩阵;行变换等于左乘初等矩阵,列变换等价于右乘初等矩阵
1.3.2 LU分解
高斯消元法:对曾广矩阵实施行初等变换化为行(简化)阶梯形
通过消元法将矩阵A转换成矩阵B(阶梯,上三角),对应行变换左乘的初等矩阵记为:
E1,...,Ek
则有:
Ek..E1A=B→A=E−11..E−1kB,记L=E−11...E−1k,则A=LU
补:matlab求矩阵A的LU分解:rref(A)
1.3.3 线性方程组的解
在行变换的基础上加上交换行,化简后的矩阵为:
[I0F0]
其中I为单位矩阵,F是自由变元的矩阵
特解:
AXb=b,平移向量,将零空间移离原点
通解:
A(Xb+Xnull)=b,Xnull为零空间
1.4 Gram-Schmidt 正交化
qTiqj={01i≠ji=j
Q=[q1,..,qn],则QTQ=I
例:
Q1=12⎡⎣⎢⎢⎢11111−11−111−1−11−1−11⎤⎦⎥⎥⎥,Q2=[cos(θ)ain(θ)−sin(θ)cos(θ)]
| 步骤 |
说明 |
| 单位化 |
q1=a1||a1||,q2=b1||b1||,...
|
| 正交化 |
a=q1,b=q2−aTbaTaa,...
|
| 整理 |
Q=[ab..](A=QR,其中R=QTA为下三角矩阵
) |
注1:Q可以不是方阵,如果是方阵则
Q−1=QT
注2:Fourier变换基于正交基
[sin(t),cos(t),..]或[et,eit,..]
1.5 分块矩阵
矩阵可以分块计算
1.6 Markov矩阵
定义:所有元素都不小于0,每列和为1。
性质:
λ1=1,|λi|<1(i≠1)
用途:可以用于表示人口的迁移。
2 矩阵的逆
2.1 逆矩阵定义
如果AB=BA=I,则B为A的逆矩阵,记为A−1
| 等价命题 |
| A可逆 |
| AX = 0只有零解 |
| A与I等价 |
| A可以表示成有限个初等矩阵的乘积 |
2.2 Gass-Jordan
solve more equations at once:
(A|I)−→−−−−初等行变换(I|A−1)
A可逆的充要条件为Ax=b有唯一解x=b/A=A−1b
2.3 伪逆(sudo inverse)
| 伪逆 |
条件1 |
条件2 |
形式 |
结论 |
| left inverse |
r=n |
N(A)=0
|
(ATA)−1AT
|
0或1个解 |
| right inverse |
r=m |
N(AT)=0
|
AT(AAT)−1
|
多解,n-m个自由变量 |
A(ATA)−1AT
是在列空间中的投影
AT(AAT)−1A
是在行空间中的投影
2.4 奇异值分解(SVD)
任何矩阵A都可以分解成:
A=UΣVT
其中
Σ
为对角矩阵
AAT=UΣΣTUT=UDUT
ATA=VΣTΣVT=VWVT
Dm×m=⎡⎣⎢⎢⎢⎢σ2100.0.0.00σ2k....0⎤⎦⎥⎥⎥⎥,Wn×n=⎡⎣⎢⎢⎢⎢σ2100.0.0.00σ2k....0⎤⎦⎥⎥⎥⎥
对应的逆为:
A+=VΣ+UT,Σ+=⎡⎣⎢⎢⎢⎢⎢1σ100.0.0.00.1σk....0⎤⎦⎥⎥⎥⎥⎥
3 线性空间
3.1 线性相关和张成
| 定义 |
说明 |
例子 |
| 向量空间 |
< V,+,*>是定义了加法和数乘的代数系统 |
过原点直线,过原点平面 |
| 线性空间 |
满足叠加性:加性+齐性 |
f(ax+by)=a∗f(x)+b∗f(y)
|
| 线性无关 |
不能互相表示的向量构成的集合 |
笛卡尔坐标轴 |
| 张成(span) |
一组向量的全部线性组合的集合 |
|
| 基(base) |
张成整个空间V的线性无关向量组称为V的基 |
(1,0,0,…),(0,1,0,…),.. |
| 维度(dimention) |
基的长度(或基的个数) |
|
注:0向量是所有向量空间的子集
注:向量空间的交是向量空间,并不一定是
3.2 四个空间
| 名称 |
说明 |
| 列空间(column space) |
矩阵列向量张成的空间 |
| 零空间(null space) |
Ax=0
的X的解构成的空间,记
N(A)
|
| 行空间(转置的列空间) |
矩阵行向量张成的空间 |
| 转置零空间(左零空间) |
ATy=yTA=0
,记
N(AT)
|
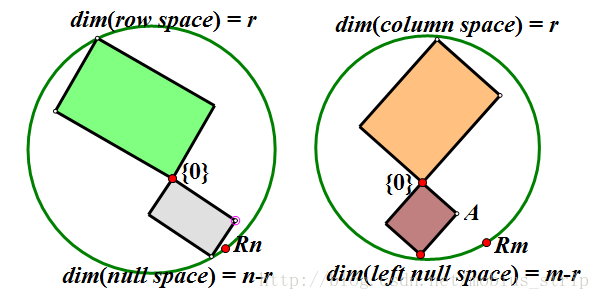
如图row space 与 N(A) 正交补,column space 与
N(AT)
正交补,row space与column space 构成双射,其他部分都是零空间。
定理:dim(V)= dim(N)+dim(值域)
3.3 线性映射
每个矩阵
Am×n
对应一个从
Rm
到
Rn
的线性映射,我们一般想要对矩阵A进行化简(特征值构成的对角矩阵),得到不同的基下的表示(分解成独立的子空间),可以简化问题或者看到问题的本质。
注:线性映射到矩阵的映射也是线性映射
3.3.1 特征值和特征向量(解耦、对角化)
特征向量在矩阵A的变化下只会出现缩放,不会出现方向变化:
Ax=λx,λ=0时,Ax=0,对应的x确定零空间N(A)
求解:
Ax=λx→(A−λI)x=0
x不为0时,有
|A−λI|=0,得到特征方程,xi为A−λiI的零空间。
注:
{Ax=αxBx=βx↛(A+B)x=(α+β)x,对应的特征向量不同
3.3.2 特殊的特征值
| 矩阵 |
特征值 |
例子 |
| 负对阵 |
λ为虚数
|
旋转矩阵[01−10],λ1=i,λ2=−i,v1=[i−1],v2=[i1]
|
| 正对称 |
λ为实数,不同特征值的特征向量正交
|
|
| 畸形 |
λ和正交向量不够n个
|
[0010],λ=1,v=[10]
|
3.3.3 特征值性质
∑ni=1λi=∑ni=1aii
∏ni=1λi=detA
3.3.4 QR法
利用QR分解迭代求解特征值:
Ai=QiRi
RiQi=Ai+1
迭代数次得到对角线矩阵,其中值为特征值
3.3.5 矩阵的多项式
f(A)=a1Ak+...+a1A+a0I
f(λ)=a1λk+...+a1λ+a0
性质:f(A)g(A) = g(A)f(A)
4 行列式
4.1 定义
detA=∣∣∣∣∣∣a11a21.an1a12a22.an2.........a1na2n.ann∣∣∣∣∣∣
当n=1时,detA=a11
当n≥2时,detA=a11A11+a12A12+...a1nA1n,Aij=(−1)i+jMij
其中Aij称为余子式,Mij为代数余子式。
4.2 对比矩阵和行列式
| 行列式 |
矩阵 |
| 数 |
数表 |
|
Dn
|
Am×n
|
| | | |
(),[] |
4.3 行列式的性质
| ID |
性质 |
推论 |
| 1 |
detI=1(放缩)
|
detA=0为奇异
|
| 2 |
行列式按任意一行展开,其值相等:
detA=ai1Ai1+...+ainAin
|
detA某一行全为0⇒detA=0
|
| 3 |
detA中某两行对应位置元素相等⇒detA=0
|
|
| 4 |
∣∣∣∣∣∣∣a11.bi1+ci1.an1........a1n.bin+cin.ann∣∣∣∣∣∣∣=∣∣∣∣∣∣∣a11.bi1.an1........a1n.bin.ann∣∣∣∣∣∣∣+∣∣∣∣∣∣∣a11.ci1.an1........a1n.cin.ann∣∣∣∣∣∣∣
|
|
| 5 |
将A的某一行元素全乘以k得到detA1=kdetA
|
将某一行的k倍加到其他行detA不,交换两行detA变号,某两行元素对应成比例则detA=0
|
| 6 |
det(AB)=detA∗detB
|
det(AT)=detA
|
4.4 伴随矩阵
A−1=CTdetA
CT
为伴随矩阵,
cij为对应的余子式
验证:
⎡⎣⎢⎢⎢a11a21.an1a12a22.an2...a1na2n.ann⎤⎦⎥⎥⎥⎡⎣⎢⎢⎢c11c21.cn1c12c22.an2...c1nc2n.cnn⎤⎦⎥⎥⎥=⎡⎣⎢⎢⎢detA0.00detA.0...00.detA⎤⎦⎥⎥⎥=detA⋅I
4.5 集合意义
行列式的值为向量组维成的超体的体积,特征向量方向的缩放比为对应的特征值。
5 应用
5.1 电路
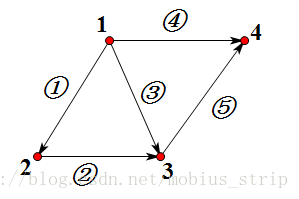
令矩阵A的行为边,列为节点,出度为-1,入度为1,x为顶点(电压),y为边(电流)。
5.1.1 电压
Ax=⎡⎣⎢⎢⎢⎢⎢⎢−10−1−101−10000110−100011⎤⎦⎥⎥⎥⎥⎥⎥⎡⎣⎢⎢⎢x1x2x3x4⎤⎦⎥⎥⎥=C⎡⎣⎢⎢⎢⎢⎢⎢y1y2y3y4y5⎤⎦⎥⎥⎥⎥⎥⎥
左侧为压降矩阵,右侧为欧姆定理,C为电阻矩阵。
5.1.2 电流
ATy=⎡⎣⎢⎢⎢−11000−110−1010−100100−11⎤⎦⎥⎥⎥⎡⎣⎢⎢⎢⎢⎢⎢y1y2y3y4y5⎤⎦⎥⎥⎥⎥⎥⎥=⎡⎣⎢⎢⎢0000⎤⎦⎥⎥⎥
基尔霍夫定律,节点电流和为0;加入电流源
f=ATy=ATCAX,ATCA为对称矩阵
。
5.2 投影(projection)
求解Ax=b,b不属于A的列向量张成的空间,此时求解距离最小的最优解Ax^=p,p是b在a方向的投影。
5.2.1 一维投影
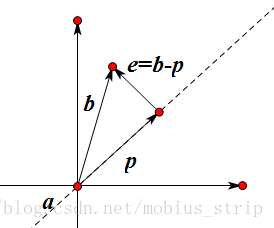
设
p⃗ =xa⃗ ,其中x为比例系数,故求解x即可。因为e⃗ 与p⃗ 正交时e的模最小,故:
e⃗ ⋅p⃗ =a⃗ T(b⃗ −p⃗ )=a⃗ T(b⃗ −xa⃗ )=0
x=aTbaTa,p=ax=aaTbaTa=aaTaTab=Pb
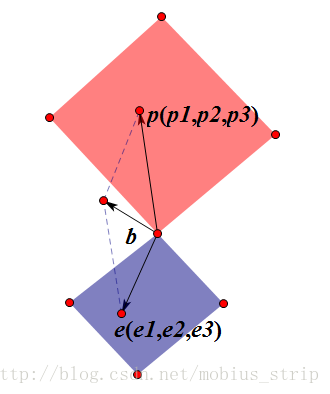
5.2.2 高维投影
因为e与A正交,故e
∈N(AT)
定义:
p=x1a1+..+xkak=Ax
正交:
aTiei=aTi(bi−Axi)=0
p=Ax=A(ATA)−1ATb=Pb
5.2.3 投影性质
| 投影矩阵(P)的性质 |
|
PT=P
|
|
P2=P
|
|
I=P+E,(b−p=e=Eb)
|
5.3 最小二乘
数据拟合,求解到已知点距离和最小的目标曲线。
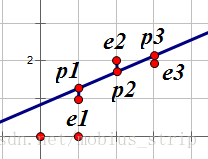
5.3.1 利用矩阵求解
设直线为C+Dx=y,带入三点坐标:
⎡⎣⎢111123⎤⎦⎥[CD]=⎡⎣⎢122⎤⎦⎥
ATAx^=ATb,x^为最小二乘解,图解如下:
5.3.2 利用导数求解
min||Ax−b||2=||e||2=e21+e22+e23
f(C,D)=(C+D−1)2+(C+2D−2)2+(C+3D−2)2
∂f∂C=0→6C+4D=0
∂f∂D=0→3C+6D=0
微分方程 5.4
Ax=λx→AS=ΛS→A=S−1ΛS
S为特征向量构成的矩阵,Λ为特征值构成的矩阵。上面公式可以简化矩阵求幂。
5.4.1 通解
| 方程 |
通解 |
|
Uk+1=AUk
|
Uk=C1λkxx+..
|
|
dudt=Au
|
u(t)=C1eλ1t+..
|
5.4.2 稳定性
线代控制理论用矩阵表示系统,如上面第二种微分方程,指数中的虚部代表震荡,实部影响稳定性。
|
λ
|
稳定性 |
| 所有
λi≤
1 |
李雅普诺夫稳定(不发散) |
| 所有
λi=
1 |
渐进稳定(随着时间收敛到0) |
| 存在
λi>
1 |
不稳定 |
5.5 基变换和图像压缩
图片(512x512 pixel)
−→−−−JPEG
64block(8x8 pixel)
−→−−基变换
系数c
−→−压缩c^(许多0)
| 变换基 |
举例 |
性质 |
| standard |
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢10000000⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢01000000⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
..
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢00000001⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
|
效果不好 |
| better |
低频(全同):
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢11111111⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
上下相反:
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢1111−1−1−1−1⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
..高频(棋盘):
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢00000001⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
|
不好求逆 |
| Fourier |
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢11111111⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢1ωω2ω3ω4ω5ω6ω7⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
..
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢1ω7ω14ω21ω28ω35ω42ω49⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
|
效果好,好求逆 |
| 简化小波 |
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢11111111⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢1111−1−1−1−1⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢11−1−10000⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢000011−1−1⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢1−1000000⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢001−10000⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢00001−100⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢0000001−1⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
|
效果好,好求逆 |