原理:
- Canny 边缘检测算法 是 John F. Canny 于 1986年开发出来的一个多级边缘检测算法,也被很多人认为是边缘检测的 最优算法, 最优边缘检测的三个主要评价标准是:
- 低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
- 高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
- 最小响应: 图像中的边缘只能标识一次。
步骤¶
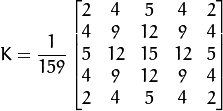
消除噪声。 使用高斯平滑滤波器卷积降噪。 下面显示了一个
的高斯内核示例:
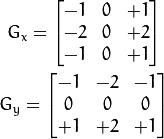
计算梯度幅值和方向。 此处,按照Sobel滤波器的步骤:
运用一对卷积阵列 (分别作用于
和
方向):
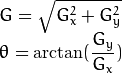
使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般 0, 45, 90, 135)
非极大值 抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
滞后阈值: 最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
- 如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
- 如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
- 如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
想要了解更多细节,你可以参考任何你喜欢的计算机视觉书籍。
CV_EXPORTS_W void Canny( InputArray image, OutputArray edges, double threshold1, double threshold2, int apertureSize=3, bool L2gradient=false );
image:原图灰度图edges: 输出边缘 可输出到原图中threshold1 :低阈值threshold2: 高阈值 一般为低阈值的二到三倍apertureSize: 内核大小L2gradient: 没找到干什么用的 以后要是用到的话再去官网看文档吧