1.Canny边缘检测
-
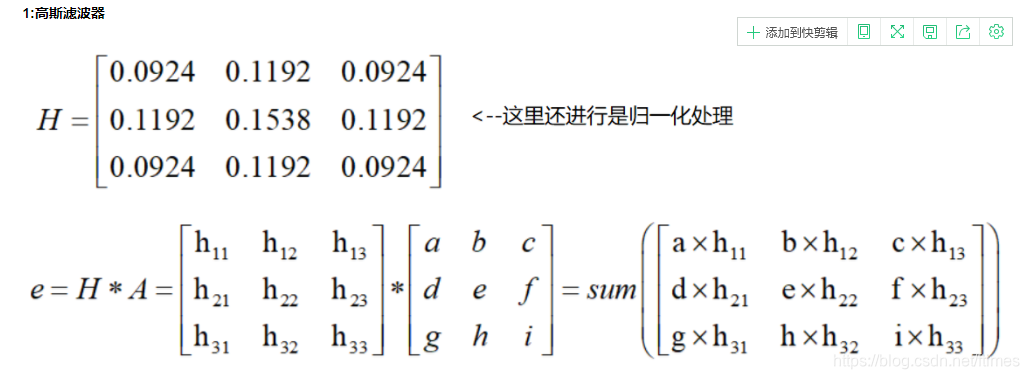
- 使用高斯滤波器,以平滑图像,滤除噪声。
-
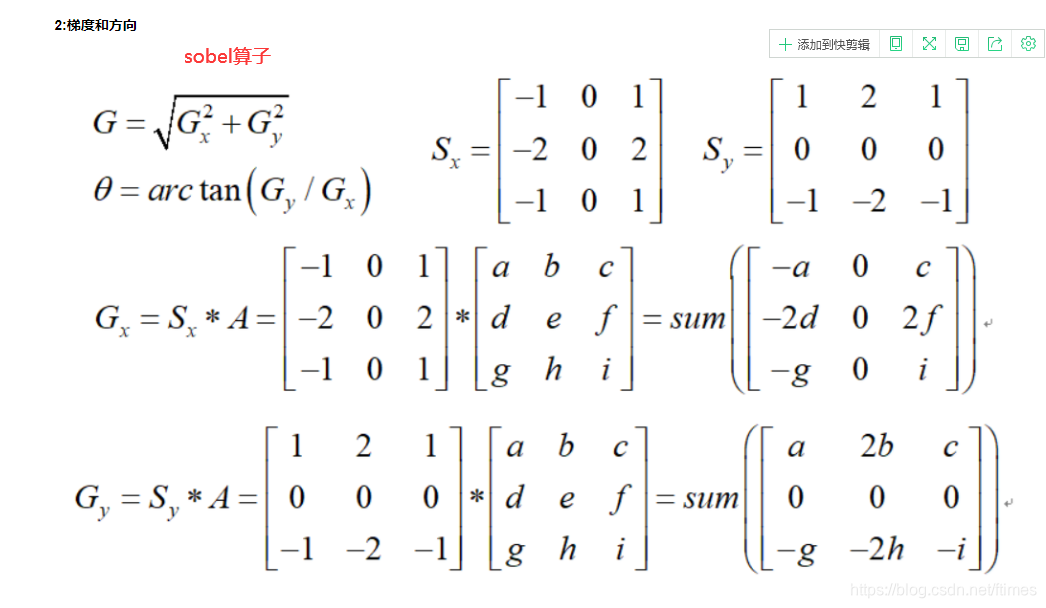
- 计算图像中每个像素点的梯度强度和方向。
-
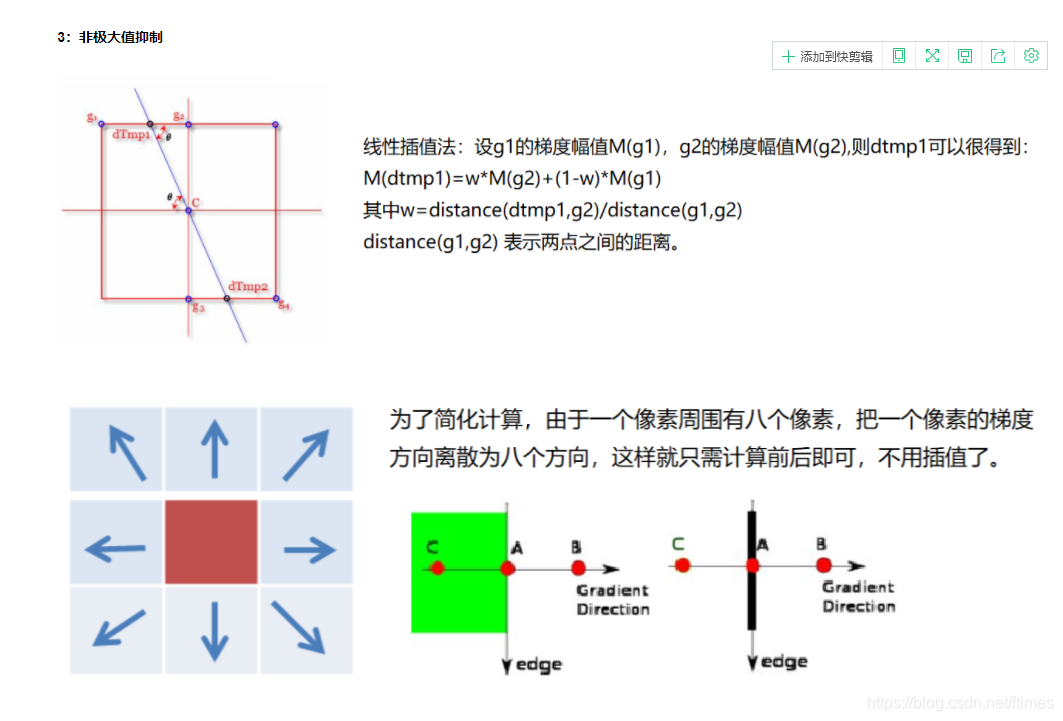
- 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
-
- 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
-
- 通过抑制孤立的弱边缘最终完成边缘检测。
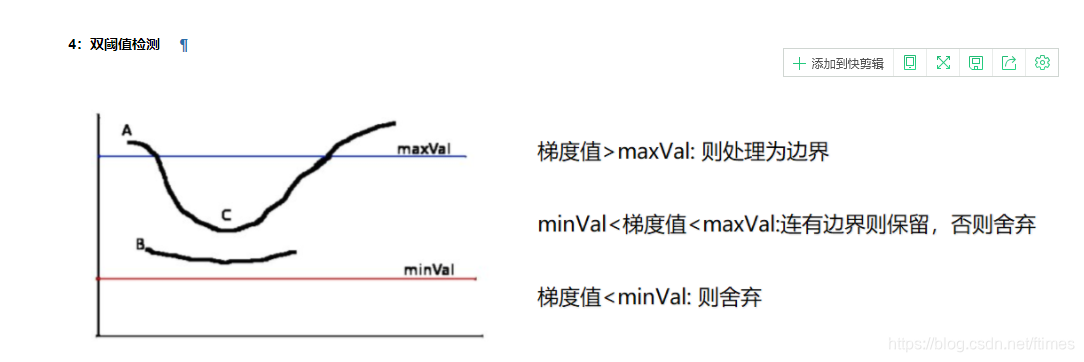
经过非极大抑制后图像中仍然有很多噪声点。Canny算法中应用了一种叫双阈值的技术。即设定一个阈值上界和阈值下界(opencv中通常由人为指定的),图像中的像素点如果大于阈值上界则认为必然是边界(称为强边界,strong edge),小于阈值下界则认为必然不是边界,两者之间的则认为是候选项(称为弱边界,weak edge),需进行进一步处理。经过双阈值处理的----百度百科
它设置两个阀值(threshold),分别为maxVal和minVal。其中大于maxVal的都被检测为边缘,而低于minval的都被检测为非边缘。对于中间的像素点,如果与确定为边缘的像素点邻接,则判定为边缘;否则为非边缘。
//那么是否代表着,上边界越低,越容易判定成边界,下边界越高,越容易判定非边界?
