点云滤波的概念
点云滤波是点云处理的基本步骤,也是进行 high level 三维图像处理之前必须要进行的预处理。其作用类似于信号处理中的滤波,但实现手段却和信号处理不一样。我认为原因有以下几个方面:
- 点云不是函数,对于复杂三维外形其x,y,z之间并非以某种规律或某种数值关系定义。所以点云无法建立横纵坐标之间的联系。
- 点云在空间中是离散的。和图像,信号不一样,并不定义在某个区域上,无法以某种模板的形式对其进行滤波。换言之,点云没有图像与信号那么明显的定义域。
- 点云在空间中分布很广泛。历整个点云中的每个点,并建立点与点之间相互位置关系成了最大难点。不像图像与信号,可以有迹可循。
- 点云滤波依赖于几何信息,而不是数值关系。
综上所述,点云滤波只在抽象意义上与信号,图像滤波类似。因为滤波的功能都是突出需要的信息。
点云滤波的方法
PCL常规滤波手段均进行了很好的封装。对点云的滤波通过调用各个滤波器对象来完成。主要的滤波器有直通滤波器,体素格滤波器,统计滤波器,半径滤波器 等。不同特性的滤波器构成了较为完整的点云前处理族,并组合使用完成任务。实际上,滤波手段的选择和采集方式是密不可分的。
- 如果使用线结构光扫描的方式采集点云,必然物体沿z向分布较广,但x,y向的分布处于有限范围内。此时可使用直通滤波器,确定点云在x或y方向上的范围,可较快剪除离群点,达到第一步粗处理的目的。
- 如果使用高分辨率相机等设备对点云进行采集,往往点云会较为密集。过多的点云数量会对后续分割工作带来困难。体素格滤波器可以达到向下采样同时不破坏点云本身几何结构的功能。点云几何结构不仅是宏观的几何外形,也包括其微观的排列方式,比如横向相似的尺寸,纵向相同的距离。随机下采样虽然效率比体素滤波器高,但会破坏点云微观结构。
- 统计滤波器用于去除明显离群点(离群点往往由测量噪声引入)。其特征是在空间中分布稀疏,可以理解为:每个点都表达一定信息量,某个区域点越密集则可能信息量越大。噪声信息属于无用信息,信息量较小。所以离群点表达的信息可以忽略不计。考虑到离群点的特征,则可以定义某处点云小于某个密度,既点云无效。计算每个点到其最近的k个点平均距离。则点云中所有点的距离应构成高斯分布。给定均值与方差,可剔除3∑之外的点。
- 半径滤波器与统计滤波器相比更加简单粗暴。以某点为中心画一个圆计算落在该圆中点的数量,当数量大于给定值时,则保留该点,数量小于给定值则剔除该点。此算法运行速度快,依序迭代留下的点一定是最密集的,但是圆的半径和圆内点的数目都需要人工指定。
实际上点云滤波的手段和传统的信号滤波与图像滤波在自动化程度,滤波效果上还有很大的差距。学者大多关注图像识别与配准算法在点云处理方面的移植,而对滤波算法关注较少。其实点云前处理对测量精度与识别速度都有很大影响。
点云库对滤波算法的实现
点云库中已经包含了上述所有滤波算法。PCL滤波算法的实现是通过滤波器类来完成的,需要实现滤波功能时则新建一个滤波器对象并设置参数。从而保证可以针对不同的滤波任务,使用不同参数的滤波器对点云进行处理。
直通滤波器:
-
// Create the filtering object
-
-
pcl::PassThrough<pcl::PointXYZ> pass;
-
-
pass.setInputCloud (cloud);
-
-
pass.setFilterFieldName ( "z");
-
-
pass.setFilterLimits ( 0.0, 1.0);
-
-
//pass.setFilterLimitsNegative (true);
-
-
pass.filter(* cloud_filtered);
体素滤波器:
// 创建过滤对象 pcl :: VoxelGrid <pcl :: PCLPointCloud2> sor; sor.setInputCloud(cloud); sor.setLeafSize(0.01f,0.01f,0.01f ); sor.filter( * cloud_filtered);
统计滤波器:

// 创建过滤对象 pcl :: StatisticalOutlierRemoval <pcl :: PointXYZ> sor; sor.setInputCloud(cloud); sor.setMeanK(50 ); sor.setStddevMulThresh(1.0 ); sor.filter( * cloud_filtered);
半径滤波器:
// 构建过滤器 pcl :: RadiusOutlierRemoval <pcl :: PointXYZ> outrem; outrem.setInputCloud(云); outrem.setRadiusSearch(0.8 ); outrem.setMinNeighborsInRadius(2 ); // apply filter outrem.filter(* cloud_filtered);
显然,不同的滤波器在滤波过程中,总是先创建一个对象,再设置对象参数,最后调用滤波函数对点云进行处理(点云为智能指针指向的一块区域)
1.点云的频率
今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概念。但这个概念并未在文献中出现也未被使用,谨在本博文中滥用一下“高频”一词。点云表达的是三维空间中的一种信息,这种信息本身并没有一一对应的函数值。故点云本身并没有在讲诉一种变化的信号。但在抽象意义上,点云必然是在表达某种信号的,虽然没有明确的时间关系,但应该会存在某种空间关系(例如激光雷达点云)。我们可以人为的指定点云空间中的一个点(例如扫描的重心或LIDAR的“源”),基于此点来讨论点云在各个方向上所谓的频率。
在传统的信号处理中,高频信号一般指信号变化快,低频信号一般指信号变化缓慢。在图像处理中,高低频的概念被引申至不同方向上图像灰度的变化,傅里叶变换可以用于提取图像的周期成分滤除布纹噪声在点云处理中,定义:。点云法线向量差为点云所表达的信号换言之,如果某处点云曲率大,则点云表达的是一个变化的信号如果点云曲率小,则其表达的是一个不变的信号这和我们的直观感受也是相近的,地面曲率小,它表达的信息量也小;人的五官部分曲率大,其表达了整个扫描中最大的信息量。
2.基于点云频率的滤波方法
虽然点云频率之前并没有被讨论,但使用频率信息的思想已经被广泛的应用在了各个方面,最著名的莫过于唐算法。难道算法被作者归类于点云分割算法中,但我认为并不准确,本质上DoN只是一种前处理,应该算是一种比较先进的点云滤波算法。分割本质上还是由欧式分割算法完成的.DoN是正常的简写。算法的目的是在去除点云低频滤波,低频信息(例如建筑物墙面,地面)往往会对分割产生干扰,高频信息(例如建筑物窗框,路面障碍锥)往往尺度上很小,直接采用基于临近信息的滤波。器会将此类信息合并至墙面或路面中所以唐算法利用了多尺度空间的思想,算法如下:
- 在小尺度上计算点云法线1
- 在大尺度上计算点云法线2
- 法线1-法线2
- 滤去3中值较小的点
- 欧式分割
显然,在小尺度上是可以对高频信息进行检测的,此算法可以很好的小尺度高频信息。其在大规模点云(如激光雷达点云)中优势尤其明显。
3.PCL对该算法的实现
算法运行过程可用图表示为:
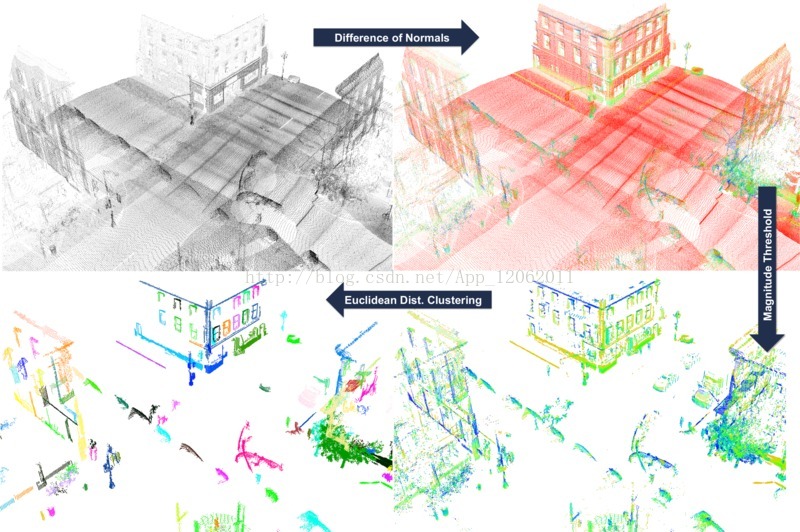
算法实现过程可表示为:
// 创建搜索树,将KDTreee用于非有组织的数据。 pcl :: search :: Search <PointXYZRGB> :: Ptr tree; if(cloud- > isOrganized()) { tree.reset(new pcl :: search :: OrganizedNeighbor <PointXYZRGB> ()); } 其他 { tree.reset(new pcl :: search :: KdTree <PointXYZRGB>(false )); } // 为搜索树 树设置输入pointcloud- > setInputCloud(cloud); // 生成法线估计器(OMP是并行计算,忽略) pcl :: NormalEstimationOMP <PointXYZRGB,PointNormal> ne; ne.setInputCloud(cloud); ne.setSearchMethod(tree); // 设定法线方向(要做差,同向很重要) ne.setViewPoint(std :: numeric_limits < float > :: max(),std :: numeric_limits < float > :: max(),std :: numeric_limits < float > :: max()); // 计算小尺度法线 pcl :: PointCloud <PointNormal> :: Ptr normals_large_scale(new pcl :: PointCloud <PointNormal> ); ne.setRadiusSearch(scale2); ne.compute( * normals_large_scale); // 计算大尺度法线 pcl :: PointCloud <PointNormal> :: Ptr normals_large_scale(new pcl :: PointCloud <PointNormal> ); ne.setRadiusSearch(scale2); ne.compute( * normals_large_scale); // 生成DoN分割器 pcl :: DifferenceOfNormalsEstimation <PointXYZRGB,PointNormal,PointNormal> don; don.setInputCloud(cloud); don.setNormalScaleLarge(normals_large_scale); don.setNormalScaleSmall(normals_small_scale); // 计算法线差 PointCloud <PointNormal> :: Ptr doncloud(new pcl :: PointCloud <PointNormal> ); copyPointCloud <PointXYZRGB,PointNormal>(* cloud,* doncloud); don.computeFeature( * doncloud); // 生成滤波条件:把法线差和阈值比 pcl :: ConditionOr <PointNormal> :: Ptr range_cond( new pcl :: ConditionOr <PointNormal> () ); range_cond - > addComparison(pcl :: FieldComparison <PointNormal> :: ConstPtr( new pcl :: FieldComparison <PointNormal>(“ curvature ” ,pcl :: ComparisonOps :: GT,threshold)) ); // 生成条件滤波器,输入滤波条件和点云 pcl :: ConditionalRemoval <PointNormal> condrem(range_cond); condrem.setInputCloud(doncloud); // 导出滤波结果 pcl :: PointCloud <PointNormal> :: Ptr doncloud_filtered(new pcl :: PointCloud <PointNormal> ); condrem.filter( * doncloud_filtered); // 欧式聚类~~~(略)
点云滤波的概念
点云滤波是点云处理的基本步骤,也是进行 high level 三维图像处理之前必须要进行的预处理。其作用类似于信号处理中的滤波,但实现手段却和信号处理不一样。我认为原因有以下几个方面:
- 点云不是函数,对于复杂三维外形其x,y,z之间并非以某种规律或某种数值关系定义。所以点云无法建立横纵坐标之间的联系。
- 点云在空间中是离散的。和图像,信号不一样,并不定义在某个区域上,无法以某种模板的形式对其进行滤波。换言之,点云没有图像与信号那么明显的定义域。
- 点云在空间中分布很广泛。历整个点云中的每个点,并建立点与点之间相互位置关系成了最大难点。不像图像与信号,可以有迹可循。
- 点云滤波依赖于几何信息,而不是数值关系。
综上所述,点云滤波只在抽象意义上与信号,图像滤波类似。因为滤波的功能都是突出需要的信息。
点云滤波的方法
PCL常规滤波手段均进行了很好的封装。对点云的滤波通过调用各个滤波器对象来完成。主要的滤波器有直通滤波器,体素格滤波器,统计滤波器,半径滤波器 等。不同特性的滤波器构成了较为完整的点云前处理族,并组合使用完成任务。实际上,滤波手段的选择和采集方式是密不可分的。
- 如果使用线结构光扫描的方式采集点云,必然物体沿z向分布较广,但x,y向的分布处于有限范围内。此时可使用直通滤波器,确定点云在x或y方向上的范围,可较快剪除离群点,达到第一步粗处理的目的。
- 如果使用高分辨率相机等设备对点云进行采集,往往点云会较为密集。过多的点云数量会对后续分割工作带来困难。体素格滤波器可以达到向下采样同时不破坏点云本身几何结构的功能。点云几何结构不仅是宏观的几何外形,也包括其微观的排列方式,比如横向相似的尺寸,纵向相同的距离。随机下采样虽然效率比体素滤波器高,但会破坏点云微观结构。
- 统计滤波器用于去除明显离群点(离群点往往由测量噪声引入)。其特征是在空间中分布稀疏,可以理解为:每个点都表达一定信息量,某个区域点越密集则可能信息量越大。噪声信息属于无用信息,信息量较小。所以离群点表达的信息可以忽略不计。考虑到离群点的特征,则可以定义某处点云小于某个密度,既点云无效。计算每个点到其最近的k个点平均距离。则点云中所有点的距离应构成高斯分布。给定均值与方差,可剔除3∑之外的点。
- 半径滤波器与统计滤波器相比更加简单粗暴。以某点为中心画一个圆计算落在该圆中点的数量,当数量大于给定值时,则保留该点,数量小于给定值则剔除该点。此算法运行速度快,依序迭代留下的点一定是最密集的,但是圆的半径和圆内点的数目都需要人工指定。
实际上点云滤波的手段和传统的信号滤波与图像滤波在自动化程度,滤波效果上还有很大的差距。学者大多关注图像识别与配准算法在点云处理方面的移植,而对滤波算法关注较少。其实点云前处理对测量精度与识别速度都有很大影响。
点云库对滤波算法的实现
点云库中已经包含了上述所有滤波算法。PCL滤波算法的实现是通过滤波器类来完成的,需要实现滤波功能时则新建一个滤波器对象并设置参数。从而保证可以针对不同的滤波任务,使用不同参数的滤波器对点云进行处理。
直通滤波器:
-
// Create the filtering object
-
-
pcl::PassThrough<pcl::PointXYZ> pass;
-
-
pass.setInputCloud (cloud);
-
-
pass.setFilterFieldName ( "z");
-
-
pass.setFilterLimits ( 0.0, 1.0);
-
-
//pass.setFilterLimitsNegative (true);
-
-
pass.filter(* cloud_filtered);
体素滤波器:
// 创建过滤对象 pcl :: VoxelGrid <pcl :: PCLPointCloud2> sor; sor.setInputCloud(cloud); sor.setLeafSize(0.01f,0.01f,0.01f ); sor.filter( * cloud_filtered);
统计滤波器:
// 创建过滤对象 pcl :: StatisticalOutlierRemoval <pcl :: PointXYZ> sor; sor.setInputCloud(cloud); sor.setMeanK(50 ); sor.setStddevMulThresh(1.0 ); sor.filter( * cloud_filtered);
半径滤波器:
// 构建过滤器 pcl :: RadiusOutlierRemoval <pcl :: PointXYZ> outrem; outrem.setInputCloud(云); outrem.setRadiusSearch(0.8 ); outrem.setMinNeighborsInRadius(2 ); // apply filter outrem.filter(* cloud_filtered);
显然,不同的滤波器在滤波过程中,总是先创建一个对象,再设置对象参数,最后调用滤波函数对点云进行处理(点云为智能指针指向的一块区域)
1.点云的频率
今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概念。但这个概念并未在文献中出现也未被使用,谨在本博文中滥用一下“高频”一词。点云表达的是三维空间中的一种信息,这种信息本身并没有一一对应的函数值。故点云本身并没有在讲诉一种变化的信号。但在抽象意义上,点云必然是在表达某种信号的,虽然没有明确的时间关系,但应该会存在某种空间关系(例如激光雷达点云)。我们可以人为的指定点云空间中的一个点(例如扫描的重心或LIDAR的“源”),基于此点来讨论点云在各个方向上所谓的频率。
在传统的信号处理中,高频信号一般指信号变化快,低频信号一般指信号变化缓慢。在图像处理中,高低频的概念被引申至不同方向上图像灰度的变化,傅里叶变换可以用于提取图像的周期成分滤除布纹噪声在点云处理中,定义:。点云法线向量差为点云所表达的信号换言之,如果某处点云曲率大,则点云表达的是一个变化的信号如果点云曲率小,则其表达的是一个不变的信号这和我们的直观感受也是相近的,地面曲率小,它表达的信息量也小;人的五官部分曲率大,其表达了整个扫描中最大的信息量。
2.基于点云频率的滤波方法
虽然点云频率之前并没有被讨论,但使用频率信息的思想已经被广泛的应用在了各个方面,最著名的莫过于唐算法。难道算法被作者归类于点云分割算法中,但我认为并不准确,本质上DoN只是一种前处理,应该算是一种比较先进的点云滤波算法。分割本质上还是由欧式分割算法完成的.DoN是正常的简写。算法的目的是在去除点云低频滤波,低频信息(例如建筑物墙面,地面)往往会对分割产生干扰,高频信息(例如建筑物窗框,路面障碍锥)往往尺度上很小,直接采用基于临近信息的滤波。器会将此类信息合并至墙面或路面中所以唐算法利用了多尺度空间的思想,算法如下:
- 在小尺度上计算点云法线1
- 在大尺度上计算点云法线2
- 法线1-法线2
- 滤去3中值较小的点
- 欧式分割
显然,在小尺度上是可以对高频信息进行检测的,此算法可以很好的小尺度高频信息。其在大规模点云(如激光雷达点云)中优势尤其明显。
3.PCL对该算法的实现
算法运行过程可用图表示为:
算法实现过程可表示为:
// 创建搜索树,将KDTreee用于非有组织的数据。 pcl :: search :: Search <PointXYZRGB> :: Ptr tree; if(cloud- > isOrganized()) { tree.reset(new pcl :: search :: OrganizedNeighbor <PointXYZRGB> ()); } 其他 { tree.reset(new pcl :: search :: KdTree <PointXYZRGB>(false )); } // 为搜索树 树设置输入pointcloud- > setInputCloud(cloud); // 生成法线估计器(OMP是并行计算,忽略) pcl :: NormalEstimationOMP <PointXYZRGB,PointNormal> ne; ne.setInputCloud(cloud); ne.setSearchMethod(tree); // 设定法线方向(要做差,同向很重要) ne.setViewPoint(std :: numeric_limits < float > :: max(),std :: numeric_limits < float > :: max(),std :: numeric_limits < float > :: max()); // 计算小尺度法线 pcl :: PointCloud <PointNormal> :: Ptr normals_large_scale(new pcl :: PointCloud <PointNormal> ); ne.setRadiusSearch(scale2); ne.compute( * normals_large_scale); // 计算大尺度法线 pcl :: PointCloud <PointNormal> :: Ptr normals_large_scale(new pcl :: PointCloud <PointNormal> ); ne.setRadiusSearch(scale2); ne.compute( * normals_large_scale); // 生成DoN分割器 pcl :: DifferenceOfNormalsEstimation <PointXYZRGB,PointNormal,PointNormal> don; don.setInputCloud(cloud); don.setNormalScaleLarge(normals_large_scale); don.setNormalScaleSmall(normals_small_scale); // 计算法线差 PointCloud <PointNormal> :: Ptr doncloud(new pcl :: PointCloud <PointNormal> ); copyPointCloud <PointXYZRGB,PointNormal>(* cloud,* doncloud); don.computeFeature( * doncloud); // 生成滤波条件:把法线差和阈值比 pcl :: ConditionOr <PointNormal> :: Ptr range_cond( new pcl :: ConditionOr <PointNormal> () ); range_cond - > addComparison(pcl :: FieldComparison <PointNormal> :: ConstPtr( new pcl :: FieldComparison <PointNormal>(“ curvature ” ,pcl :: ComparisonOps :: GT,threshold)) ); // 生成条件滤波器,输入滤波条件和点云 pcl :: ConditionalRemoval <PointNormal> condrem(range_cond); condrem.setInputCloud(doncloud); // 导出滤波结果 pcl :: PointCloud <PointNormal> :: Ptr doncloud_filtered(new pcl :: PointCloud <PointNormal> ); condrem.filter( * doncloud_filtered); // 欧式聚类~~~(略)