RCNN
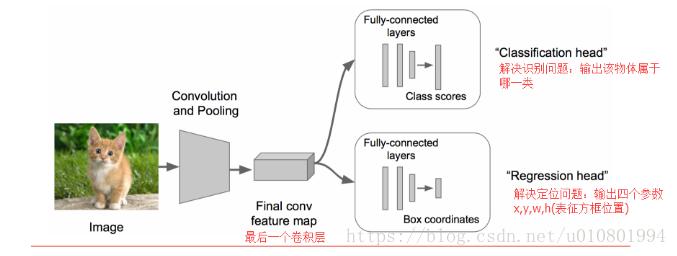
RCNN主要步骤:
(1)生成候选框(select search)。在图像中确定2k个候选框,采用Felzenszwalbs‘s method、SLIC、quick shift等方法实现。
(2)将生成的候选框缩放至相同大小,输入CNN进行提取特征
(3)分类。对候选框中的特征进行判别,SVM
(4)回归。对某一特征的候选框,调整位置。
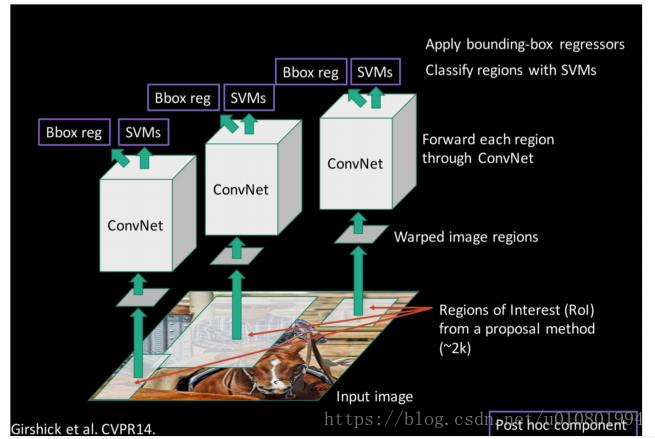
缺点:对生成的每个候选框都进行CNN特征提取,时间花费过多;候选框缩放,精度降低
SPPnet
论文:
SPP-Net是对rcnn的改进,spatial Pyramid Pooling,主要观点:
(1)共用特征卷积图
(2)空间金字塔池化,有效地解决了不同尺度的图片在全连接层输出不一致的问题。
fast RCNN
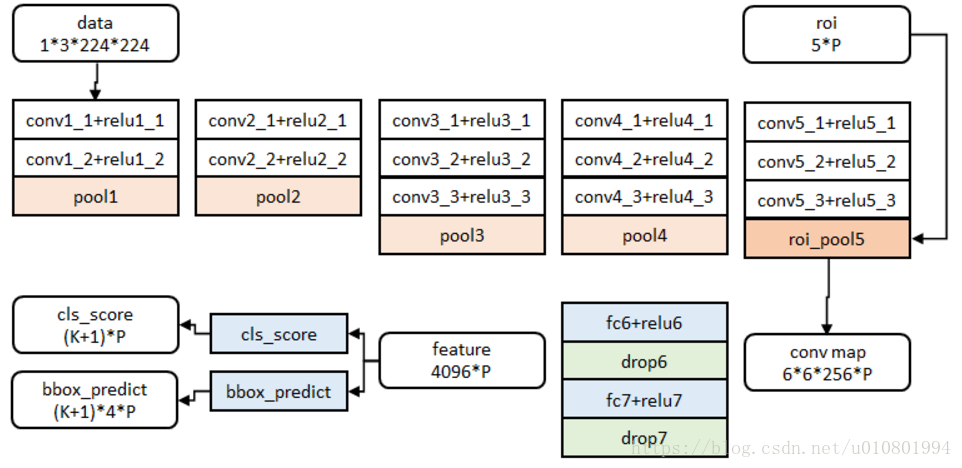

RCNN主要步骤:
(1)生成候选框(select search)。在图像中确定2k个候选框,采用Felzenszwalbs‘s method、SLIC、quick shift等方法实现。
(2)对整张图像进行卷积CNN特征提取。
(3)通过将候选框映射在conv5输出的feature map上。输入ROI pooling层(单层sppNet)进行下采样。
(3)分类。对候选框中的特征进行判别,SVM
(4)回归。对某一特征的候选框,调整位置。
NOTE:
SPPnet中金字塔模型的每一个刻度相当于一层,如插图(16(4*4)+4(2*2)+1(1*1)=21),相当于有3层金字塔,fast rcnn的ROI pooling,相当于是sppNet的单层金字塔。roi_pool层将每个候选区域均匀分成M×N块(对应候选区域的纵横比),(不是上面所讲的n*n,通过m*n进行尺度的缩放,如16*8,而固定大小为4*4,即均匀分成4*2块)。。。实现pooling后,即可将候选区域固定为大小一样的特征图
RCNN和fast RCNN:
rcnn:
SS候选框(2000个)—> 对每个候选框CNN特征提取—->分类+回归
fast rcnn:
一张图像—->CNN特征提取—->(SS候选框的特征进行对应提取)—>ROI pooling—>分类+回归
创新点:
(1)fast RCNN实现了大幅度提速,原因:仅对整张图像做一次CNN特征提取,通过将候选框映射在conv5输出的feature map上。
(2)fast rcnn使用ROI pooling使得尺寸保持一致。
(3)将分类和回归统一,实现多任务学习。
缺点:候选框的生成仍使用Select Search方法,无法应用GPU。
候选框的选择使用非极大值抑制NMS(Non maximum Suppression),局部最大搜索方法。
faster RCNN
优化候选框选择算法
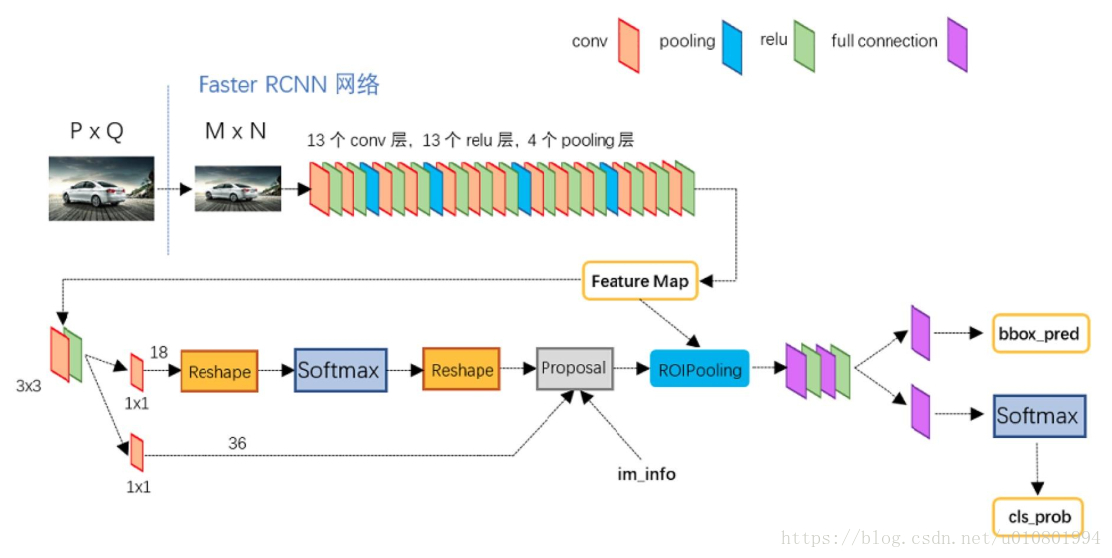
具体步骤为:
1、对整张图进行CNN特征提取,得到feature map
2、feature map输入RPN(region proposal network),快速生成候选区域;(anchor机制)
3、通过交替训练,使RPN和Fast-RCNN网络共享参数;
4、应用分类和回归。
mask RCNN
https://blog.csdn.net/xiao__run/article/details/81284094
SDD
1.多尺度的特征图用来检测
2.去掉了全连接层
3.设置先验框