1、什么是ROS?
ROS的全称是Robot Operating System,它实际上是一个中间件/类操作系统,连接了真正的操作系统和个人编写的程序。
先来看一下ROS框架:
分布式+进程管理+进程间通信:
ROS是一种分布式的系统,允许有多个进程,并将这些进程统一进行管理。但是,在ROS中,进程不再被称之为进程了,而是被称之为节点(Node)。
2、ROS的安装
可以参考官网的安装介绍:http://wiki.ros.org/cn/kinetic/Installation/Ubuntu
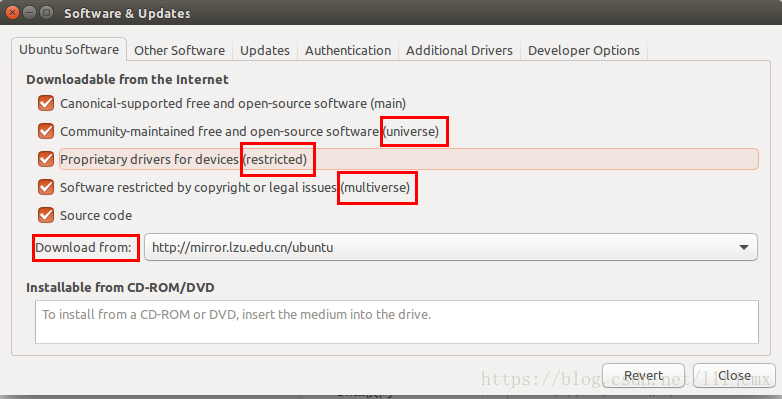
1、Configure Ubuntu Respositories
在software & update中选中restricted、universe、multiverse,一般也会设置Doadload from(不是必需),将下载服务器设置成清华的服务器或者让系统自动选择一个最合适的服务器。具体情况如下图所示:
2、Setup your sources.list
目的是设置电脑能够接受来自packages.ros.org的软件包
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'3、Setup your keys
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1164、安装
首先,确保软件包索引是最新的
sudo apt-get update安装ROS桌面完整版
sudo apt-get install ros-kinetic-desktop-full
注:我在这一步遇到了下面中的依赖问题
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
ros-kinetic-desktop-full : Depends: ros-kinetic-desktop but it is not going to be installed
Depends: ros-kinetic-simulators but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
解决办法:
sudo apt-get install aptitude
sudo aptitude install ros-kinetic-desktop-full
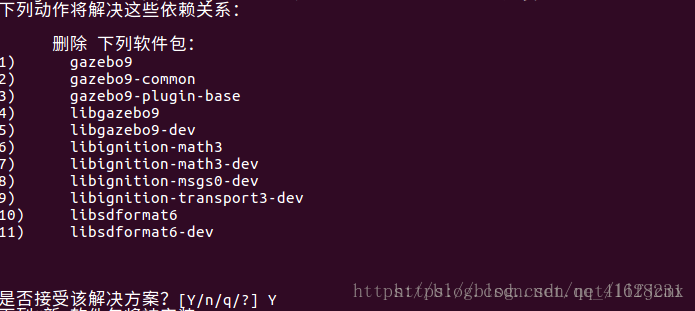
选择Y,会自动解决依赖关系,这条命令执行完后,ros应该已经装好了。
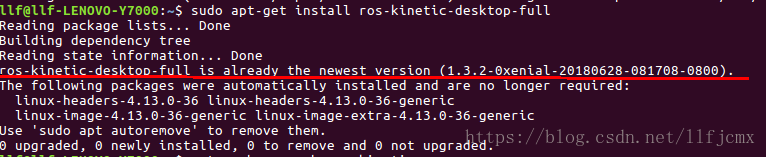
可以再执行一次: sudo apt-get install ros-kinetic-desktop-full
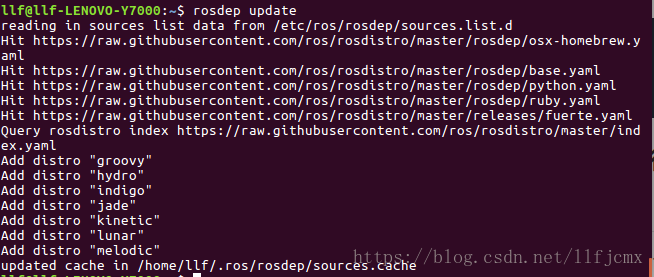
5、初始化rosdep
在开始使用ROS之前还需要初始化rosdep。rosdep可以方便在需要编译某些源码的时候自动安装一些系统依赖,同时也是运行ROS中的某些核心组件所必需的工具.
sudo rosdep init
rosdep update
执行结果如下图:
6、环境变量配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7、安装rosinstall等工具
到目前位置,已经安装了运行ROS核心组件所需的内容。为了创建和管理自己的ROS工作空间,有多种独立分布的工具和需求。例如:rosinstall是一个频繁使用的命令行工具,它让你能够轻松的用一条命令下载许多ROS包的源码树。
sudo apt-get install python-rosinstall
安装完成。下面说一下如何运行小乌龟的例子。
1、新打开一个终端,运行指令roscore
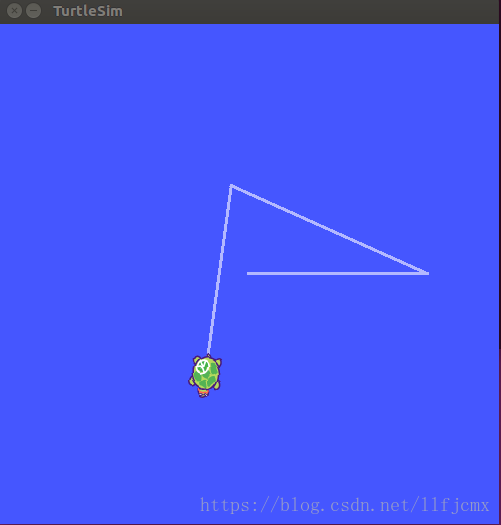
2、新打开一个终端,运行指令rosrun turtlesim turtlesim_node,打开一个小乌龟窗口

3、新打开一个终端,运行指令rosrun turtlesim turtle_teleop_key,运行控制乌龟运动的节点。然后就可以用方向键控制小乌龟移动了。
4、新打开一个窗口,运行指令rosrun rqt_graph rqt_graph,打开一个ros图形化界面,界面中展示了运行的ros节点之间的关系。
