Introduce
JetSon系列是Nvidia公司推出的面向无人智能化领域的嵌入式平台,这块嵌入式板子的出现使得我们可以在边缘设备上处理复杂数据,实现人工智能。
Jetson TX2 模块
它是一台模块化 AI 超级计算机,采用 NVIDIA Pascal™ 架构。更棒的是,它性能强大,但外形小巧,节能高效,非常适合机器人、无人机、智能摄像机和便携医疗设备等智能边缘设备。它支持 Jetson TX1 模块的所有功能,同时可以铸就更大型、更复杂的深度神经网络。
技术规格
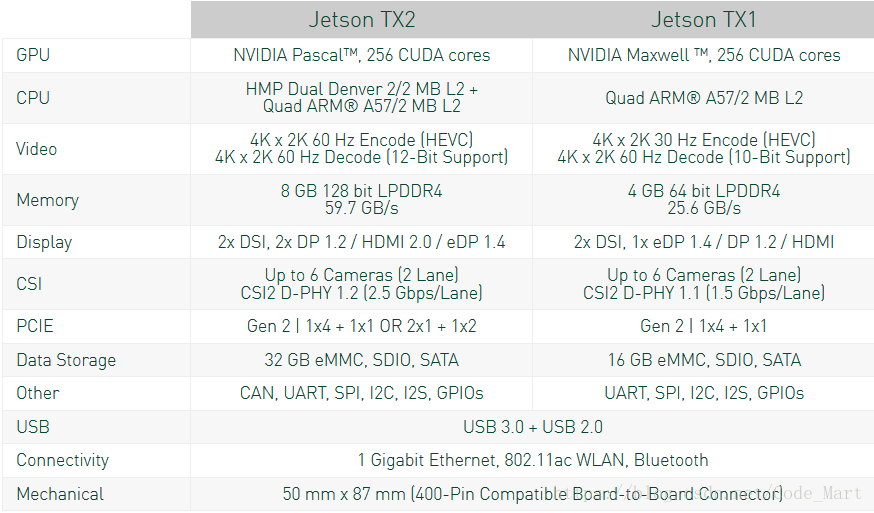
资料来源:NVIDIA JESTSON
PS:如果你是大学在校生或者从事科研工作,可以考虑教育折扣(某宝上5000+,教育折扣不到3000)
Requirements
- 一台主机,OS为Ubuntu 14.04/16.04(下文将其称为Host,此外,我所用HOST的系统为Ubuntu 16.04)
- HDMI转VGA转换器(TX2只提供了HDMI接口)
USB HUB(TX2 只提供一个USB接口和一个Micro USB接口,但是当你需要刷机时,该Micro USB接口另有它用)
Installation
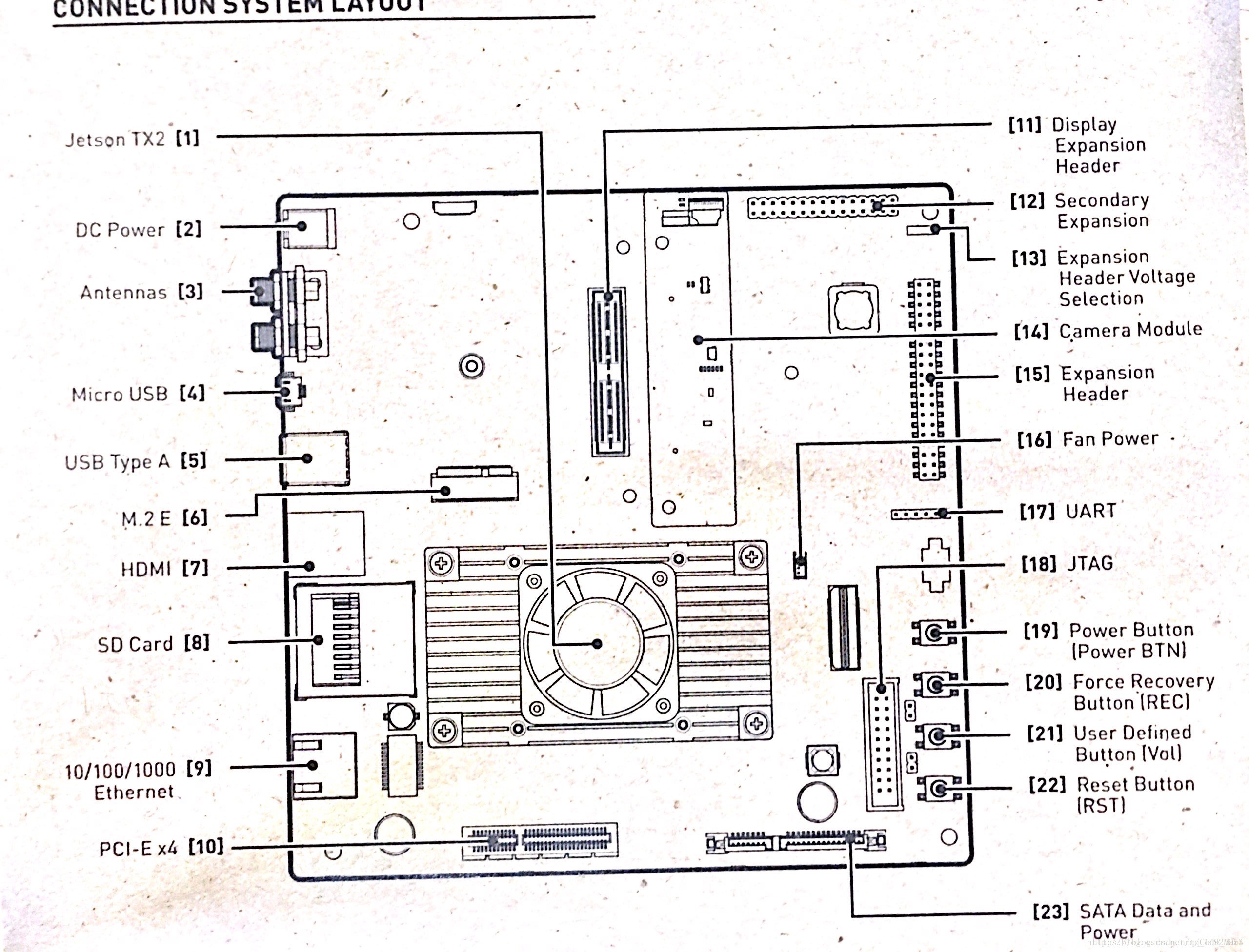
1.1 安装Jetson TX2
开箱之后,你会得到以下物品:
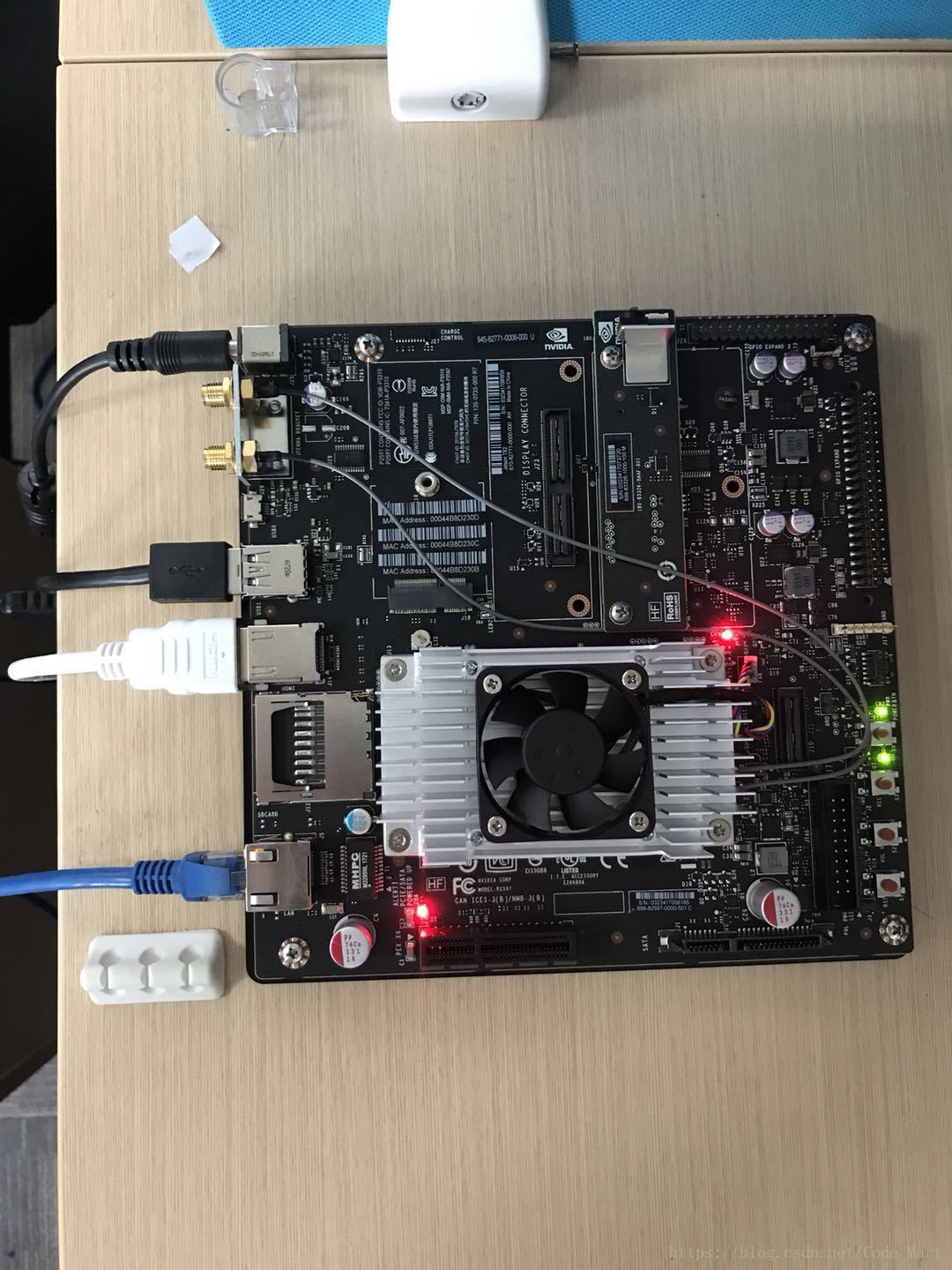
1. 嵌入式主板 X1
2. 电源适配器 X1
3. 天线 X2
4. USB线 X1
5. Micro USB线 X1
6. 电源线 X1将其完全装好后,应该如下图所示:
1.2 进入自带系统
Jetson TX2 自带ubuntu 16.04 系统,首次开机时,进入的是以nvidia用户登录的Ubuntu命令行界面。如果要使用图形化界面,需要安装Nvidia Linux驱动,Nvidia 驱动安装通过输入密码,切换ROOT权限用户(username:nvidia, password:nvidia)。
输入密码后,按照屏幕上的所提示的信息,输入以下命令即可:
cd /home/nvidia/NVIDIA-INSTALLER
./installer.sh
reboot1.3 在 Host 上安装 JetPack 3.3
- 注册 NVIDIA 账号
下载 JetPack 需要先注册 NVIDIA Developer 账号。
- 下载 JetPack 3.3
进入官网,下载 JetPack 3.3;在下载的同时,可以去参考官方教程。
此外,如果无法下载,此处放上百度云链接: JetPack 3.3。
- 运行 JetPack 3.3 安装程序
待 JetPack-L4T-3.3-linux-x64.run 下载完成后,我们先在主目录下创建一个JetPack文件夹,并将其放入该文件夹。
进入该文件夹,更改该文件的权限并运行该文件:
chmod +x ./JetPack-L4T-3.3-linux-x64.run
./JetPack-L4T-3.3-linux-x64.run
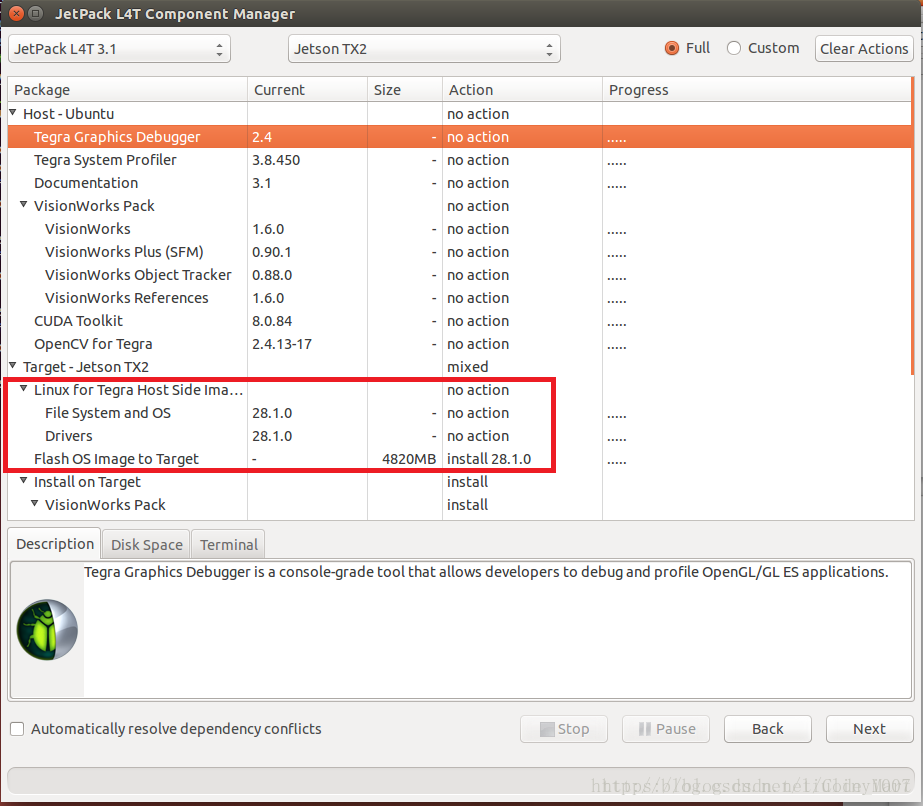
4. 选择所需安装资源
下载各种包,包括Ubuntu系统、CUDA8.0、cuDNN6.0、TensorRT2.1、VisionWorks1.6、OpenCV2.4.13等基本常用的工具,如果不需要装,就选中该项,点右上角的Clear Actions。如:如果不重装系统,则将下图红框里的内容不装。一般都是直接下一步。
在下载期间,可以查看 Jetson TX2 和 HOST 的的 IP 地址,并确保两者能互相通信。
此外,如果出现下载错误提示,可以先点 back,再点击 next,程序会接着之前的进度继续下载。
1.4 将软件加载至Jetson TX2
当 Host 下载好所有包,并安装完毕后,会如下图所示:
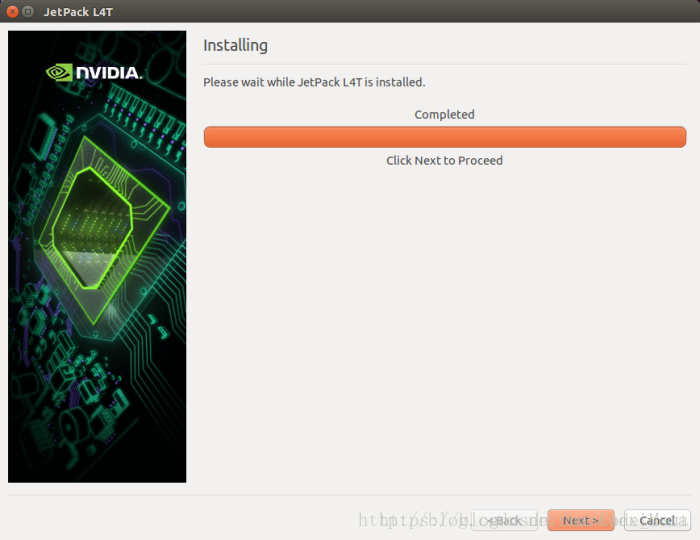
点击 next,并将 Jetson TX2 的 IP 地址,账号以及密码填写进去:
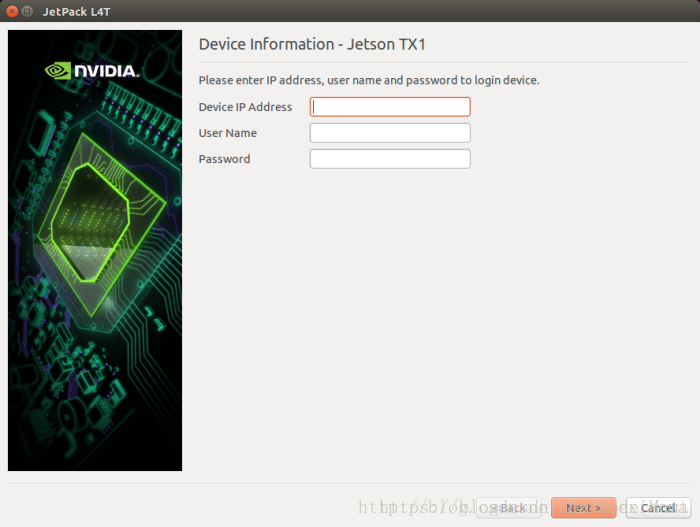
接着,程序将所有资源加载至 Jetson TX2中。
如果之前选择资源时,选择了重装系统,则需进行额外步骤,文章末尾所提供的其他博文对此有进行介绍
1.5 检查
以上步骤完成后,需重启Jetson TX2,再打开终端,分别输入以下命令,已查看所需包是否安装成功:
nvcc -C
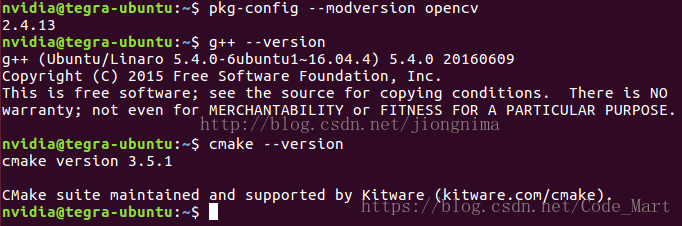
pkg-config --modversion opencv
g++ -version
cmake --version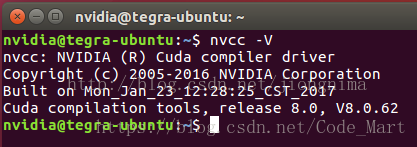
一般来说,重启之后,CUDA 已经安装完毕,如果终端报错,可能是因为路径设置的问题。
我们需要在 Jetson TX2 上设置环境变量,打开终端,在主目录下输入该命令:
sudo gedit /etc/bash.bashrc并在文件的末尾加入如下命令:
export PATH=/usr/local/cuda-8.0/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-8.0/lib64:$LD_LIBRARY_PATH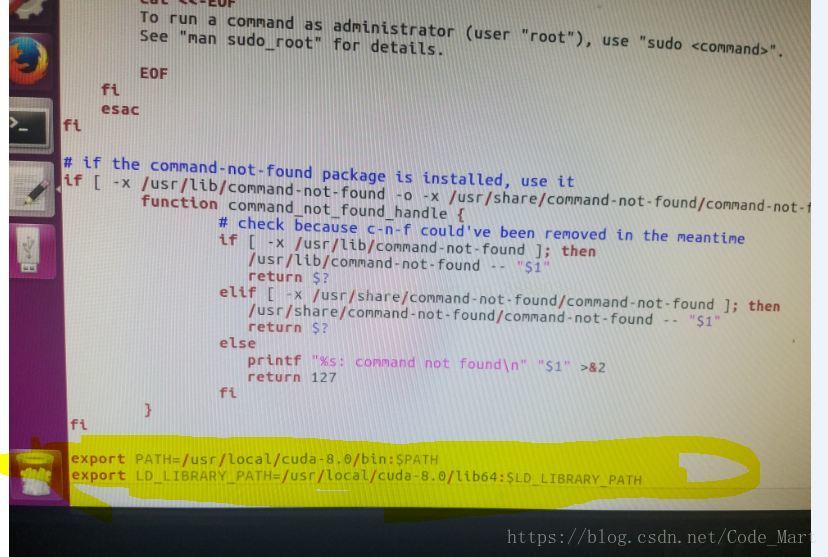
运行视频目标检测 Demo
安装成功后,重启 TX2,连接键盘鼠标显示器,就可以跑 Demo 了。
1. 海面模拟
cd ~
cd NVIDIA_CUDA-9.0_Samples/bin/aarch64/linux/release/
./oceanFFT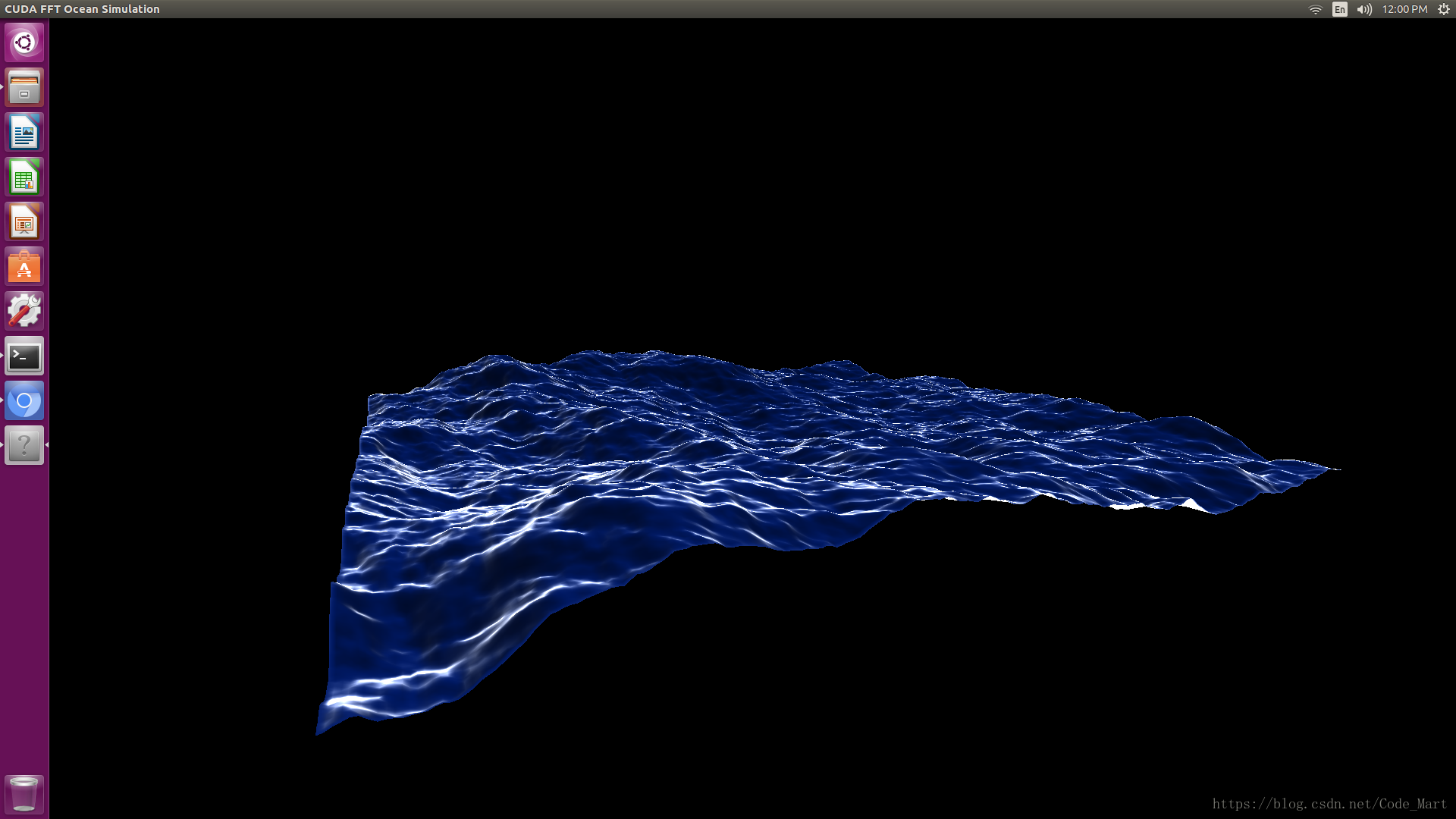
2. 车辆识别
cd ~
cd tegra_multimedia_api/samples/backend
./backend 1 ../../data/Video/sample_outdoor_car_1080p_10fps.h264 H264 --trt-deployfile ../../data/Model/GoogleNet_one_class/GoogleNet_modified_oneClass_halfHD.prototxt --trt-modelfile ../../data/Model/GoogleNet_one_class/GoogleNet_modified_oneClass_halfHD.caffemodel --trt-forcefp32 0 --trt-proc-interval 1 -fps 10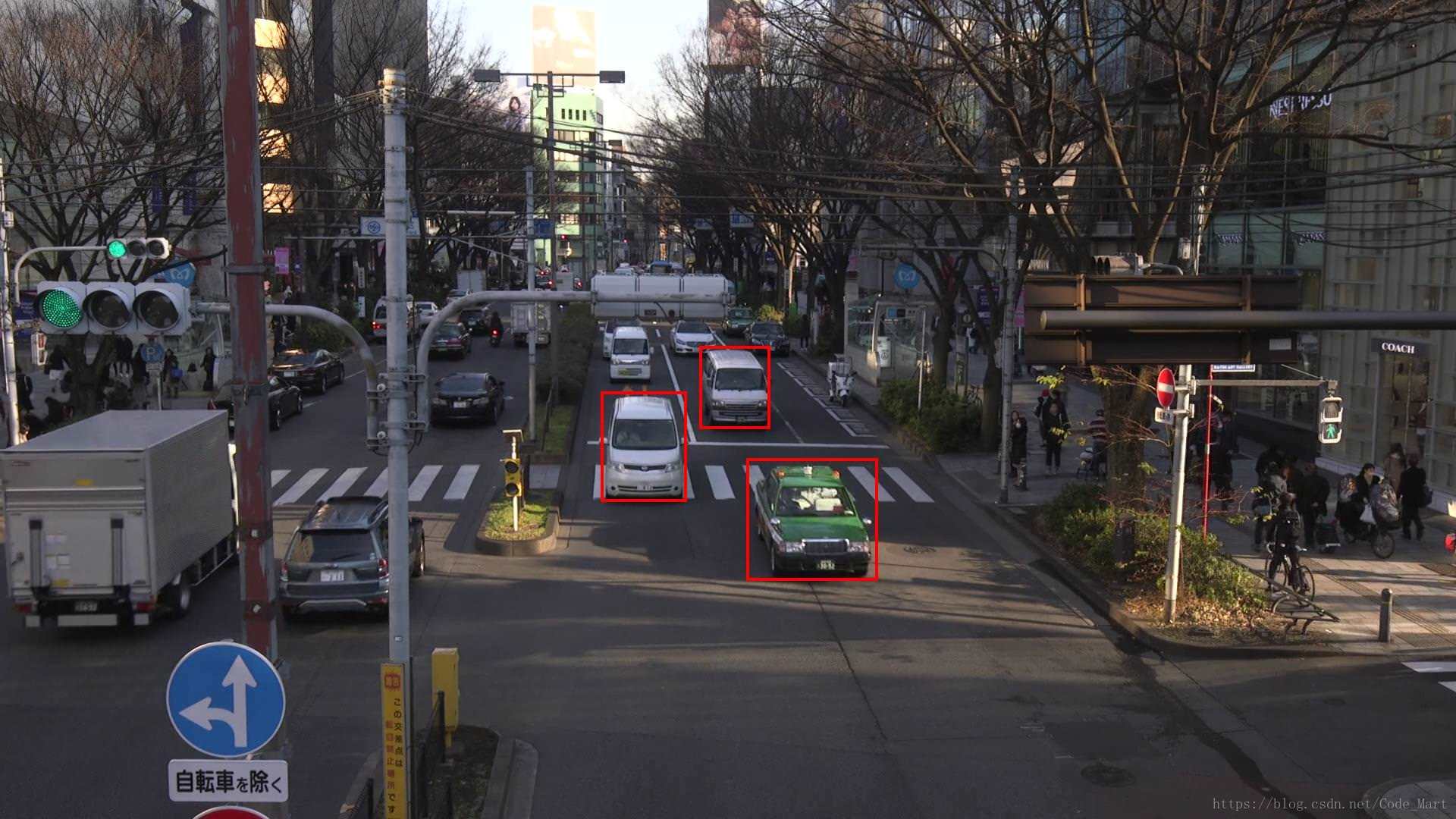
References
- Jetson TX2 刷机并安装JetPack3.1
- Nvidia Jetson TX2刷机过程
- TX2从入门到放弃学习笔记(1)-基础
- Jetson TX2 开机测试及刷机
- Jetson TX2安装Jetpack 3.0注意事项
- nvidia jetson TX2配置caffe
- Jetson TX2入门之开箱刷机跑demo
如果你看到了这篇文章的最后,并且觉得有帮助的话,麻烦你花几秒钟时间点个赞,或者受累在评论中指出我的错误。谢谢!
作者信息:
CSDN:Code_Mart
Github:Bojack-want-drink