霍夫直线有两个函数,HoughLines 与 HoughLinesP,第一个是得到极坐标输出,第二个得到直角坐标系中直线的首位两点集合。
HoughLines :
它是如何实现的?
-
众所周知, 一条直线在图像二维空间可由两个变量表示. 例如:
- 在 笛卡尔坐标系: 可由参数:
 斜率和截距表示.
斜率和截距表示. - 在 极坐标系: 可由参数:
 极径和极角表示
极径和极角表示
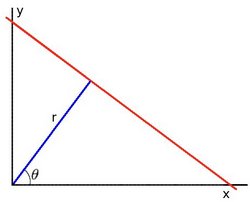
对于霍夫变换, 我们将用 极坐标系 来表示直线. 因此, 直线的表达式可为:
化简得:

- 在 笛卡尔坐标系: 可由参数:
-
一般来说对于点
 , 我们可以将通过这个点的一族直线统一定义为:
, 我们可以将通过这个点的一族直线统一定义为:
这就意味着每一对
 代表一条通过点 的直线.
代表一条通过点 的直线. -
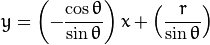
如果对于一个给定点
我们在极坐标对极径极角平面绘出所有通过它的直线, 将得到一条正弦曲线. 例如, 对于给定点  and
and  我们可以绘出下图 (在平面
我们可以绘出下图 (在平面  -
-  ):
):
只绘出满足下列条件的点
 and
and  .
. -
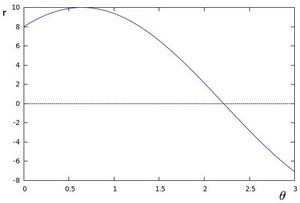
我们可以对图像中所有的点进行上述操作. 如果两个不同点进行上述操作后得到的曲线在平面
- 相交, 这就意味着它们通过同一条直线. 例如, 接上面的例子我们继续对点:  ,
,  和点
和点  ,
,  绘图, 得到下图:
绘图, 得到下图:
这三条曲线在
- 平面相交于点  , 坐标表示的是参数对 (
, 坐标表示的是参数对 ( ) 或者是说点 , 点
) 或者是说点 , 点  和点
和点  组成的平面内的的直线.
组成的平面内的的直线. -
那么以上的材料要说明什么呢? 这意味着一般来说, 一条直线能够通过在平面
- 寻找交于一点的曲线数量来 检测. 越多曲线交于一点也就意味着这个交点表示的直线由更多的点组成. 一般来说我们可以通过设置直线上点的 阈值 来定义多少条曲线交于一点我们才认为 检测 到了一条直线. -
这就是霍夫线变换要做的. 它追踪图像中每个点对应曲线间的交点. 如果交于一点的曲线的数量超过了 阈值, 那么可以认为这个交点所代表的参数对
 在原图像中为一条直线.
在原图像中为一条直线.
HoughLines(
InputArrray src,//输入图像,必须是8-bit的灰度图像
OutputArray lines,//输出的极坐标来表示直线
double rho,//生成极坐标时候的像素扫描步长
double theta,//生成极坐标时候的角度扫描步长,一般取CV_PI/180
int threshold,//阀值,只有获得足够交点的极坐标点才被看成是直线
double srn=0,//是否应用多尺度的霍夫变换,如果不是设置0,表示经典霍夫变换
double stn=0,//是否应用多尺度的霍夫变换,如果不是设置0,表示经典霍夫变换
double min_theta=0,//表示角度扫描范围的起始角度
double max_theta=CV_PI //表示角度扫描范围的结束角度,这是是0~180
)HoughLinesP(
InputArrray src,//输入图像,必须是8-bit的灰度图像
OutputArray lines,//输出的极坐标来表示直线
double rho,//生成极坐标时候的像素扫描步长
double theta,//生成极坐标时候的角度扫描步长,一般取CV_PI/180
int threshold,//阀值,只有获得足够交点的极坐标点才被看成是直线
double minLineLength,//表示承认的最短直线长度
double maxLineGap //表示可连接的最大间断间隙
)处理逻辑:先边缘检测 — 霍夫直线检测
#include <opencv2/opencv.hpp>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
char file[] = "2.bmp";
int main(int argc, char** argv)
{
Mat img = imread(file, -1);
pyrDown(img, img, Size(img.cols/2, img.rows/2));
imshow("img", img);
Mat gray, canny, RBGimg;
cvtColor(img, gray, CV_BGR2GRAY);
Canny(gray, canny, 100, 200, 3);
imshow("canny",canny);imwrite("canny.jpg",canny);
vector<Vec4i> lines;
//要求灰度图像,Vec4i 的容器
HoughLinesP(canny, lines, 1, CV_PI/180, 10,0,10);
cvtColor(gray, RBGimg, CV_GRAY2BGR);
for (size_t i=0; i<lines.size(); i++)
{
Vec4i p = lines[i];
line( RBGimg, Point(p[0],p[1]), Point(p[2], p[3]), Scalar(0,0,255), 2, 8);
}
imshow("imgs", RBGimg);imwrite("imgs.jpg",RBGimg);
waitKey();
return 1;
} 原图

canny

霍夫直线图

HoughCircles
HoughCircles函数实现了圆形检测,它使用的算法也是改进的霍夫变换——2-1霍夫变换(21HT)。
函数原型:
void HoughCircles( InputArray image, OutputArray circles,
int method, double dp, double minDist,
double param1 = 100, double param2 = 100,
int minRadius = 0, int maxRadius = 0 );
函数参数说明:
image:为输入图像,要求是灰度图像;
circles:为输出圆向量,每个向量包括三个浮点型的元素——圆心横坐标,圆心纵坐标和圆
半径;
method:为使用霍夫变换圆检测的算法,Opencv只实现了2-1霍夫变换,它的参数是
CV_HOUGH_GRADIENT;(一直都是如此)
dp:为第一阶段所使用的霍夫空间的分辨率,dp=1时表示霍夫空间与输入图像空间的大小
一致,dp=2时霍夫空间是输入图像空间的一半,以此类推;
minDist:为圆心之间的最小距离,如果检测到的两个圆心之间距离小于该值,则认为它们是
同一个圆心;
param1:为边缘检测时使用Canny算子的高阈值;
param2:为步骤1.5和步骤2.5中所共有的阈值;
minRadius,maxRadius:为所检测到的圆半径的最小值和最大值。
PS:在实际应用中HoughCircles的参数很让人着急,因此往往与fitellipse配合使用,大致原理为:
(1)使用HoughCircles做粗略定位;
(2)使用fitellipse进一步精确定位。(没试验过)
#include <opencv2/opencv.hpp>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
char file[] = "4.jpg";
int main(int argc, char** argv)
{
Mat img = imread(file, -1);
pyrDown(img, img, Size(img.cols/2, img.rows/2));
imshow("img", img);
//中值滤波
Mat medBlur;
medianBlur(img, medBlur, 3);
//转灰度
Mat gray;
cvtColor(img, gray, CV_BGR2GRAY);
//霍夫圆检测,自己实际操作非常困难,对于参数的调整很重要。很难找到所有的圆。
vector<Vec3f> points;
HoughCircles(gray, points, CV_HOUGH_GRADIENT, 1, 30, 400, 30, 1, 55);
for (size_t i=0; i<points.size(); i++)
{
Vec3f p = points[i];
//画圆
circle(img, Point(p[0],p[1]),p[2], Scalar(0,0,255), 1, 8);
//画圆心
circle(img, Point(p[0],p[1]),2, Scalar(255,255,0), 1, 8);
}
imshow("circle", img);imwrite("circle.jpg",img);
waitKey();
return 1;
} 原图,换了很多个效果也不理想

效果真的很让人着急
