内容整理自<视觉SLAM十四讲>
一.前言
上回说道:
这就得到了一个总体意义下的最小二乘问题(Least Square Problem)。我们明白它的最优解等价于状态的最大似然估计。
也就是说最大似然估计又被转换成了噪声项(即误差)的平方的最小化.
现在开始用非线性优化的方法求求解最小二乘法:注意前端通过ICP 和PnP会提供非线性优化算法的初值.
初值可能会通过"先求相机位姿,再求空间点位置"的方法,(注意这个方法和BA中的边缘化方法不是一个哈,边缘化虽然也有点类似这个意思,Schur补)但是非线性优化则是把它们都看成优化变量.
注意非线性优化和BA是不同的:非线性优化是一种优化算法,BA只是passive vision(被动视觉)也就是普通相机进行SLAM 求解时的那个观测方程的表现形式.BA使用非线性优化策略.当然如果BA已经扩散成一个大概念了那就不同了.
二.总体思路
对于最小二乘问题,可以直接求解目标函数的导数,使导数为0,然后求解X的最优值.注意这里的X是一个整体优化函数,里面包括三维地图点和相机位姿.(如果在dso里面,还要包括很多东西,包括相机光学参数等)
但是直接求解导数的零点这样的非线性方程太复杂了,所以:
三.算法推导
3.1) 最速下降法和牛顿法推导(最简单的一阶梯度和二阶梯度)

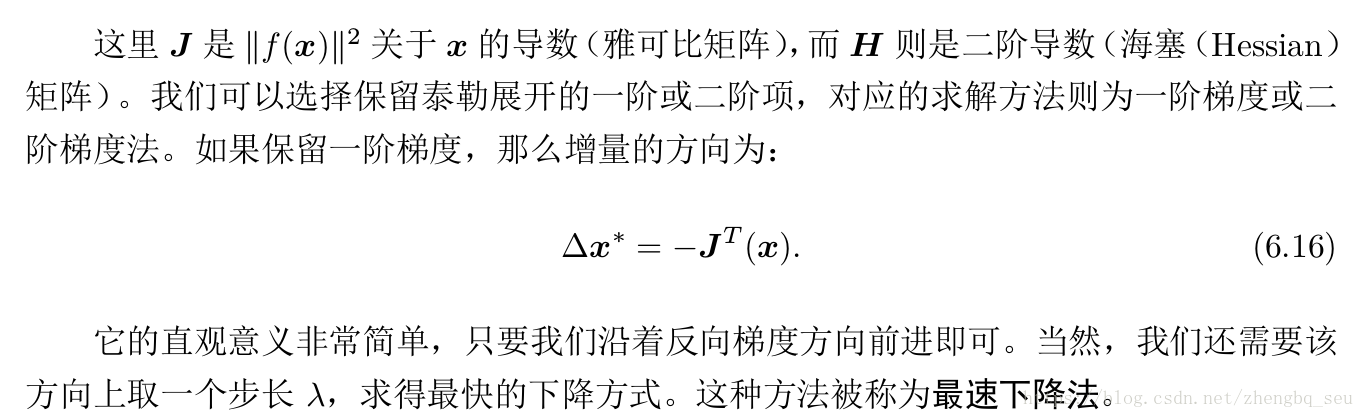
这里雅克比矩阵的转置(猜测):因为是要沿着一阶梯度的反向梯度方向前进,加负号和转置都是反向的意思.(好比T包含着R和t,其中R的反向就是R的转置,t就是负号.这个猜测好像比较生硬.
这里对二次型求导若是:Y=X'*A*X --> DY/DX=2AX (二次型求导),则针对一次的getaX求导前面则要转置(这个若成立则下面所有推导就成立了)
雅克比矩阵(百度百科):在向量微积分中,雅可比矩阵是一阶偏导数以一定方式排列成的矩阵,其行列式称为雅克比行列式。雅可比矩阵的重要性在于它体现了一个可微方程与给出点的最优线性逼近。因此,雅可比矩阵类似于多元函数的导数.
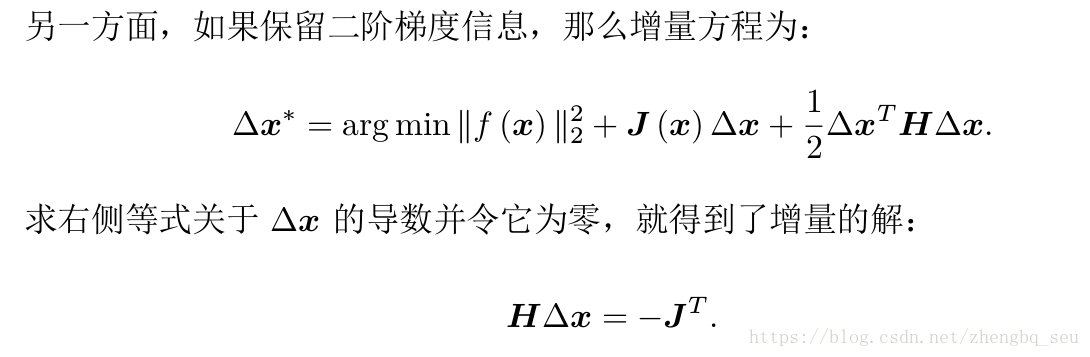
这里的增量方程和最后的解我都没能make it clear. 但是最后的解是最重要的.(前面也有很多猜测)

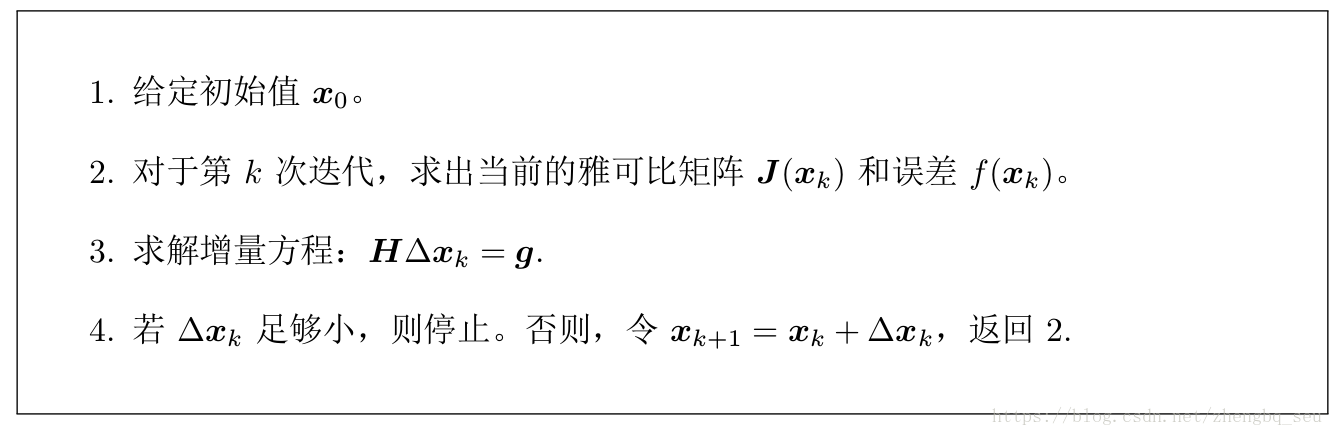
3.2) 高斯-牛顿法和LM法结论
推导过程见书
LM方法: