ESP32 - ULP 协处理器在低功耗模式下操作 RTC GPIO 的例子
本文目的是介绍 ESP32 如何在 ULP 协处理器中操作 RTC GPIO
1. RTC GPIO
RTC GPIO 一共有 18 个 IO 口,这些 GPIO 管脚具有低功耗 RTC 性能和模拟功能,并且由 ESP32 的 RTC 子系统控制。这些功能不使用 IO_MUX 和 GPIO 交换矩阵,而是使用 RTC_MUX 将 IO 指向 RTC 子系统。
当这些管脚被配置为 RTC GPIO 管脚时,作为输出的管脚能够在芯片处于 Deep-Sleep 睡眠状态下保持输出电平值,或者作为输入管脚使用时可以将芯片从 Deep-Sleep 中唤醒。
下表列出了 RTC 管脚和其对应的 GPIO 管脚
| RTC GPIO Num | GPIO Num | Pad Name | Analog Function1 | Analog Function2 | Analog Function3 |
|---|---|---|---|---|---|
| 0 | 36 | SENSOR_VP | ADC_H | ADC1_CH0 | - |
| 1 | 37 | SENSOR_CAPP | ADC_H | ADC1_CH1 | - |
| 2 | 38 | SENSOR_CAPN | ADC_H | ADC1_CH2 | - |
| 3 | 39 | SENSOR_VN | - | ADC1_CH3 | - |
| 4 | 34 | VDET_1 | - | ADC1_CH6 | - |
| 5 | 35 | VDET_2 | - | ADC1_CH7 | - |
| 6 | 25 | GPIO25 | DAC_1 | ADC2_CH8 | - |
| 7 | 26 | GPIO26 | DAC_2 | ADC2_CH9 | - |
| 8 | 33 | 32K_XN | XTAL_32K_N | ADC1_CH5 | TOUCH8 |
| 9 | 32 | 32K_XP | XTAL_32K_P | ADC1_CH4 | TOUCH9 |
| 10 | 4 | GPIO4 | - | ADC2_CH0 | TOUCH0 |
| 11 | 0 | GPIO0 | - | ADC2_CH1 | TOUCH1 |
| 12 | 2 | GPIO2 | - | ADC2_CH2 | TOUCH2 |
| 13 | 15 | MTDO | - | ADC2_CH3 | TOUCH3 |
| 14 | 13 | MTCK | - | ADC2_CH4 | TOUCH4 |
| 15 | 12 | MTDI | - | ADC2_CH5 | TOUCH5 |
| 16 | 14 | MTMS | - | ADC2_CH6 | TOUCH6 |
| 17 | 27 | GPIO27 | - | ADC2_CH7 | TOUCH7 |
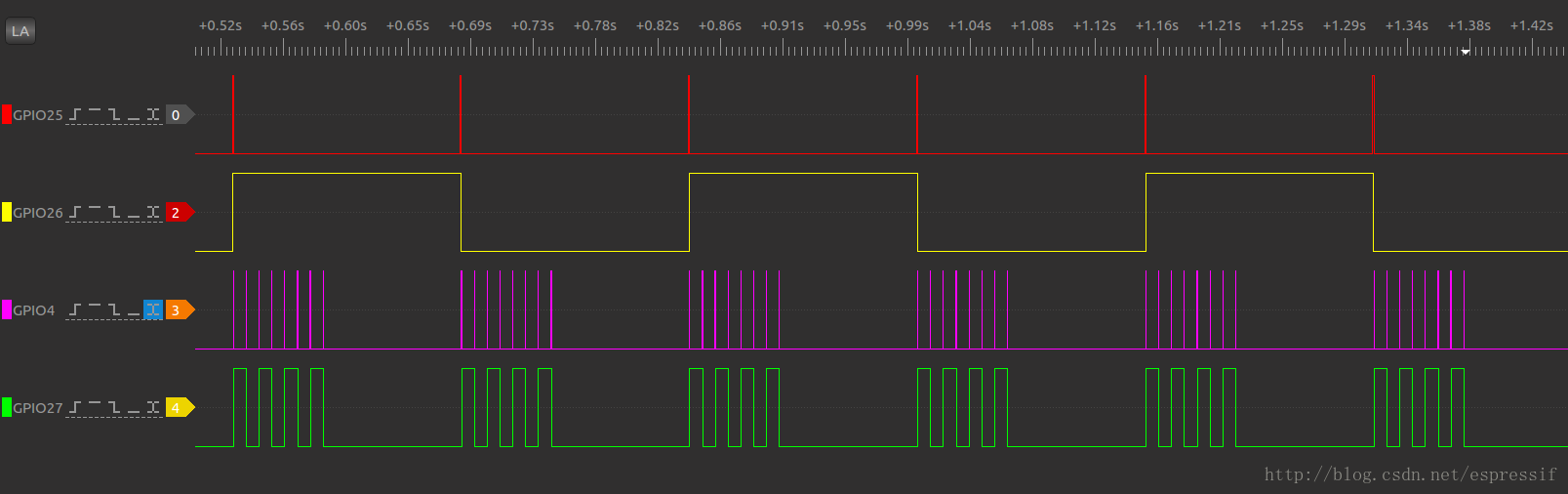
在本例子中,我们使用 GPIO25,GPIO26 指示 CPU 的工作状态;GPIO4,GPIO27 指示 ULP 协处理器的状态。
| PIN | 说明 |
|---|---|
| GPIO25 | 主 CPU 运行时置高,主 CPU 休眠时置低 |
| GPIO26 | 每当主 CPU 被唤醒时,翻转一次电平状态 |
| GPIO4 | ULP 协处理器运行时置高,ULP 协处理器时休眠时置低 |
| GPIO27 | 每当 ULP 协处理器被唤醒时,翻转一次电平状态 |
2. RTC GPIO 翻转图示
本例子主 CPU 设置 ULP 协处理器每隔 10ms 唤醒自身一次 并且 ULP 协处理器每隔 8 个唤醒周期后,再唤醒主 CPU 一次,依此循环。每次处理器状态切换时,均有相应的 GPIO 翻转指示当前的状态。
3.软件部分
ESP32 的 C 语言编译环境安装和配置参照 链接地址,另外 ULP 协处理器目前只支持汇编编程,所以还需要安装汇编工具链,下面介绍汇编工具链的安装和配置。
3.1 汇编环境的配置
ULP 协处理器配置汇编编译工具链,只需两步即可安装配置完毕,下面给出 ubuntu 操作系统下配置的步骤,或者点击 链接地址 获得更多 ULP 编程信息
- 第一步, 下载工具链
binutils-esp32ulp toolchain链接地址, 解压到需要安装的目录- 第二步,添加工具链的
bin目录到系统环境变量PATH中。例如我的解压目录是/opt/esp32ulp-elf-binutils那么添加export PATH=/opt/esp32ulp-elf-binutils/bin:$PATH这一行到 /home 目录的隐藏文件.bashrc文件最后一行,保存关闭文件并使用命令source .bashrc使上述环境变量生效
至此,汇编编译环境就安装好了,将 ulp_rtc_gpio/ 目录下的 sdkconfig.defaults 复制一份改名为 sdkconfig,然后在工程中使用 make all -j8 && make flash monitor 编译并烧录命令时,会自动调用汇编工具链编译汇编代码。
3.2 汇编代码介绍
需要注意:每个 GPIO(包括 RTC GPIO)都有单独的 hold 功能,由 RTC 寄存器控制。 GPIO 的 hold 功能被置上后, GPIO 在置上 hold 那一刻的状态被强制保持,无论内部信号如何变化,修改 IO_MUX 配置或者 GPIO 配置,都不会改变 GPIO 的状态。所以如果希望在看门狗超时触发内核复位或系统复位时亦或者 Deep-sleep 时 GPIO 的状态不被改变,就需要提前把相应GPIO 的 hold 功能置位。
在下面的汇编代码中,我们需要操作 RTC_GPIO10, 则先应 disable RTC_GPIO10 管脚的 hold 功能后,再操作 RTC_GPIO10 输出高
.global entry
entry:
/* Disable hold of RTC_GPIO10 output */
WRITE_RTC_REG(RTC_IO_TOUCH_PAD0_REG,RTC_IO_TOUCH_PAD0_HOLD_S,1,0)
/* Set the RTC_GPIO10 output HIGH to signal that ULP is now up */
WRITE_RTC_REG(RTC_GPIO_OUT_W1TS_REG,RTC_GPIO_OUT_DATA_W1TS_S+10,1,1)
/* Wait some cycles to have visible trace on the scope */
wait 1000同理,在进入 Deep-Sleep 之前,拉低 RTC_GPIO10 之后,则需要把 RTC_GPIO10 管脚的 hold 功能置位,使其在系统复位时能够保持原来的电平状态
.global toggle_complete
toggle_complete:
/* Set the RTC_GPIO10 output LOW (clear output) to signal that ULP is now going down */
WRITE_RTC_REG(RTC_GPIO_OUT_W1TC_REG,RTC_GPIO_OUT_DATA_W1TC_S+10,1,1)
/* Enable hold on RTC_GPIO10 output */
WRITE_RTC_REG(RTC_IO_TOUCH_PAD0_REG,RTC_IO_TOUCH_PAD0_HOLD_S,1,1)
/* Compare the toggle counter with toggle cycles to wakeup SoC and wakup SoC if the values match */
and r0, r3, toggle_cycles_to_wakeup
jump wake_up, eq4. 额外说明
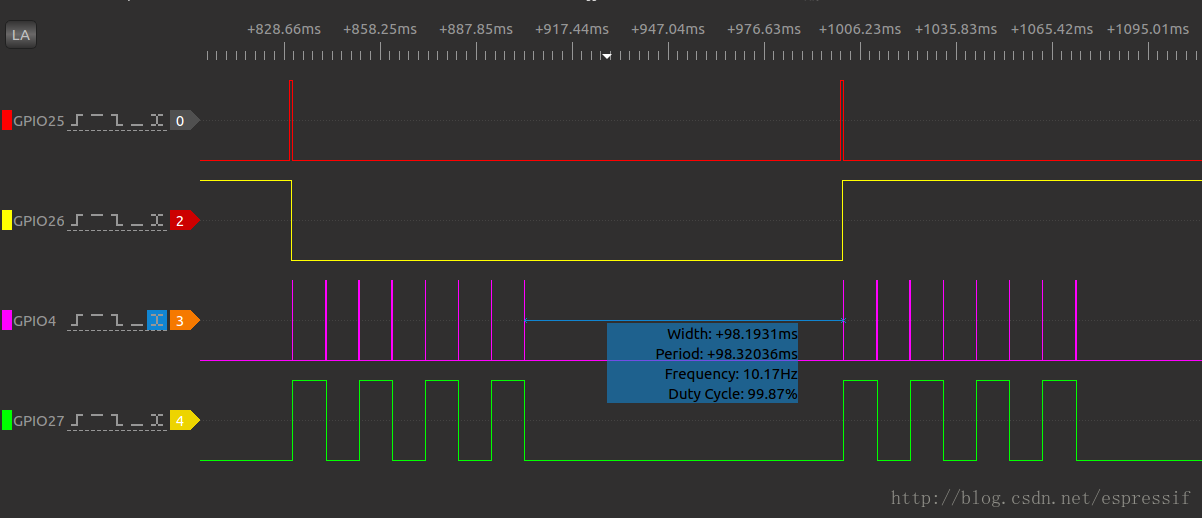
如果你运行了这个例子,而且试图分析各个处理器切换状态,可能会遇到上图中额外多出的 98ms 的疑惑。这里需要说明的是,汇编程序 Polling CPU 并唤醒 CPU 时间是很短的,绝大部分的时间是用来 boot 主 CPU 的(例如主 CPU 上电动作、一级 Bootloader 加载打印等时间消耗)。因为在 DeepSleep 状态下 CPU 的各个模块都是被关掉的,如内部 8MHz 振荡器、40MHz 高速晶振、PLL 及射频模块均禁用;数字内核断电,CPU 内容丢失,这里有一个重新上电加载的过程。
/* Get ULP back to sleep */
.global exit
exit:
halt
.global wake_up
wake_up:
/* Check if the SoC can be woken up */
READ_RTC_REG(RTC_CNTL_DIAG0_REG, 19, 1)
and r0, r0, 1
jump exit, eq
/* Wake up the SoC and stop ULP program */
wake
/* Stop the wakeup timer so it does not restart ULP */
WRITE_RTC_FIELD(RTC_CNTL_STATE0_REG, RTC_CNTL_ULP_CP_SLP_TIMER_EN, 0)
halt