文章目录
一、ESP32引脚资源分配与使用建议
转到博文:ESP32引脚资源分配与使用建议
二、ESP32需要特别注意的几个GPIO
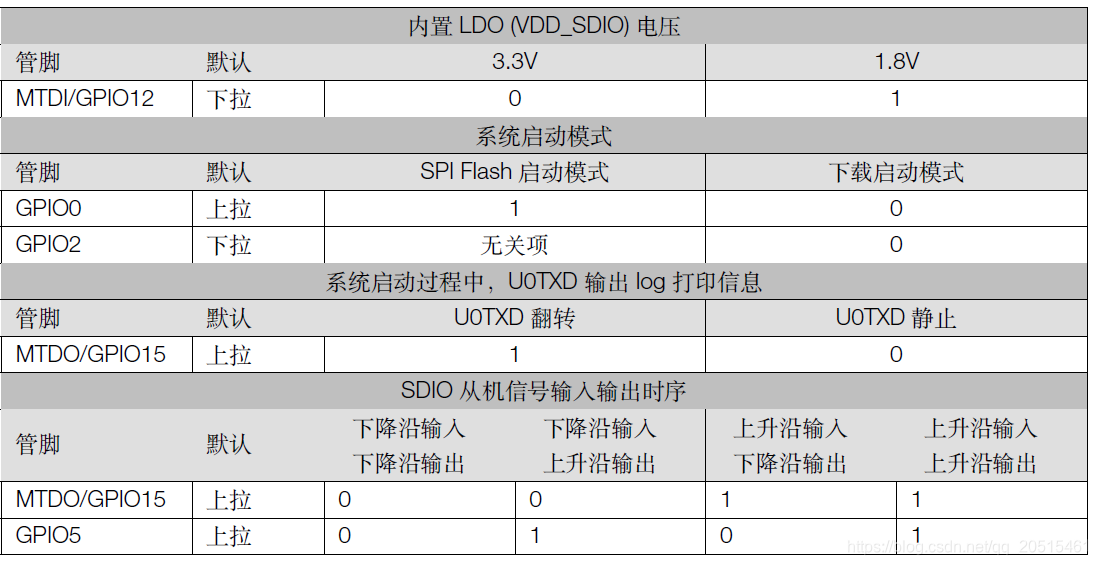
1. Strapping引脚
ESP32 共有5 个Strapping 管脚。
MTDI/GPIO12:内部下拉GPIO0:内部上拉GPIO2:内部下拉MTDO/GPIO15:内部上拉GPIO5:内部上拉
系统复位时,这些管脚的值被保存到寄存器。软件可以读取寄存器“GPIO_STRAPPING”中这5 个位的值。该寄存器值一直保持到掉电。
完成复位后,这些管脚被当做普通GPIO 使用。
因此在系统复位时,要处理好这些引脚,要给一个确定的值
| GPIO号 | 引脚号 | 作用 | 处理方法 |
|---|---|---|---|
| 12 | 18 | VDD_SDIO 管脚可配置输出1.8 V(Boot 启动时,需GPIO12 的值为1),或输出3.3 V(Boot 启动时,需GPIO12的值为0,默认状态),给外部电路使用(flash)。 | |
| :–: | :–: | :–: | :–: |
| :–: | :–: | :–: | :–: |
| :–: | :–: | :–: | :–: |
| :–: | :–: | :–: | :–: |
2. 专用spi flash引脚
GPIO6GPIO7GPIO8GPIO9GPIO10GPIO11
一般在模组内部用于外接SPI flash。
Note that GPIO6-11 are usually used for SPI flash.
3. 只具有输入功能的引脚
GPIO34GPIO35GPIO36GPIO37GPIO38GPIO39
以上管脚只具有输入功能,没有上拉下拉选项
can only be set as input mode and do not have software pullup or pulldown functions.
三、ESP32 API GPIO使用
- 官方文档release/v3.3版本 ESP_IDF: GPIO & RTC GPIO
1. 输入输出模式
GPIO_MODE_INPUT 输入
GPIO_MODE_OUTPUT 输出
GPIO_MODE_OUTPUT_OD 开漏输出
GPIO_MODE_INPUT_OUTPUT_OD 开漏输入输出
GPIO_MODE_INPUT_OUTPUT 输入输出
2. 中断类型
GPIO_INTR_DISABLE 禁用GPIO中断
GPIO_INTR_POSEDGE GPIO中断类型:上升沿
GPIO_INTR_NEGEDGE 下降沿
GPIO_INTR_ANYEDGE 上升沿和下降沿
GPIO_INTR_LOW_LEVEL 输入低电平触发
GPIO_INTR_HIGH_LEVEL 输入高电平触发
3. 上下拉使能
GPIO_PULLUP_DISABLE 禁用GPIO上拉电阻
GPIO_PULLUP_ENABLE 启用GPIO上拉电阻
GPIO_PULLDOWN_DISABLE 禁用GPIO下拉电阻
GPIO_PULLDOWN_ENABLE 启用GPIO下拉电阻
4. 驱动能力
GPIO_DRIVE_CAP_0 弱 weak
GPIO_DRIVE_CAP_1 强
GPIO_DRIVE_CAP_2 默认值
GPIO_DRIVE_CAP_DEFAULT 默认值
GPIO_DRIVE_CAP_3 最强
四、ESP32 GPIO 中断使用
示例:打印GPIO4和GPIO5的点平变化
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include "driver/gpio.h"
#define GPIO_INPUT_IO_0 4
#define GPIO_INPUT_IO_1 5
#define GPIO_INPUT_PIN_SEL ((1ULL<<GPIO_INPUT_IO_0) | (1ULL<<GPIO_INPUT_IO_1))
#define ESP_INTR_FLAG_DEFAULT 0
static xQueueHandle gpio_evt_queue = NULL;
static void IRAM_ATTR gpio_isr_handler(void* arg)
{
uint32_t gpio_num = (uint32_t) arg;
xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL);
}
static void gpio_task_example(void* arg)
{
uint32_t io_num;
for(;;) {
if(xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY)) {
printf("GPIO[%d] intr, val: %d\n", io_num, gpio_get_level(io_num));
}
}
}
void app_main()
{
gpio_config_t io_conf;
//interrupt of rising edge
io_conf.intr_type = GPIO_PIN_INTR_POSEDGE;
//bit mask of the pins, use GPIO4/5 here
io_conf.pin_bit_mask = GPIO_INPUT_PIN_SEL;
//set as input mode
io_conf.mode = GPIO_MODE_INPUT;
//enable pull-up mode
io_conf.pull_up_en = 1;
gpio_config(&io_conf);
//change gpio intrrupt type for one pin
gpio_set_intr_type(GPIO_INPUT_IO_0, GPIO_INTR_ANYEDGE);
//create a queue to handle gpio event from isr
gpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));
//start gpio task
xTaskCreate(gpio_task_example, "gpio_task_example", 2048, NULL, 10, NULL);
//install gpio isr service
gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);
//hook isr handler for specific gpio pin
gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);
//hook isr handler for specific gpio pin
gpio_isr_handler_add(GPIO_INPUT_IO_1, gpio_isr_handler, (void*) GPIO_INPUT_IO_1);
//remove isr handler for gpio number.
gpio_isr_handler_remove(GPIO_INPUT_IO_0);
//hook isr handler for specific gpio pin again
gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);
while(1) {
vTaskDelay(1000 / portTICK_RATE_MS);
}
}
注意:
- 请勿在中断服务函数中使用printf
- 中断服务函数添加
IRAM_ATTR使其放在IRAM中
