一、KD树基本解释
1.1、基础概念
为了优化KNN的计算,使用KD树解决通过距离函数在高维矢量之间进行相似性检索的问题,快速而准确地找到查询点的近邻。
- 索引结构中相似性查询:
- 范围查询:给定查询点和查询距离阈值,从数据集中查找所有与查询点距离小于阈值的数据
- K近邻查询:给定查询点及正整数K,从数据集中找到距离查询点最近的K个数据,当K=1时,它就是最近邻查询。
- 特征点匹配:
-
线性扫描/穷举搜索:依次计算样本集E中每个样本到输入实例点的距离,然后抽取出计算出来的最小距离的点即为最近邻点。
此种办法简单,但当样本集或训练集很大时。在物体识别的问题中,可能有数千个甚至数万个SIFT特征点,而去计算这成千上万的特征点与输入实例点的距离,时间复杂度高。 -
构建数据索引: 因为实际数据一般都会呈现簇状的聚类形态,因此我们想到建立数据索引,然后再进行快速匹配。
索引树是一种树结构索引方法,其基本思想是对搜索空间进行层次划分。根据划分的空间是否有混叠可以分为Clipping和Overlapping两种。
前者划分空间没有重叠,其代表就是k-d树;后者划分空间相互有交叠,其代表为R树。
1.2 KD树的构建
| 域名 | 数据类型 | 描述 |
|---|---|---|
| Node-data | 数据矢量 | 数据集中某一个n维数据点,分割超面是通过数据点Node-Data并垂直于轴 |
| Range | 空间矢量 | 该节点所代表的空间范围 |
| split | 整数 | 垂直于分割超平面的方向轴序号。 split的平面,分割超面将整个空间分割成两个子空间。 |
| 令split域的值为i | / | 如果空间Range中某个数据点的第i维数据小于Node-Data[i], 那么,它就属于该节点空间的左子空间,否则就属于右子空间。 |
| Left /Right | k-d树 | 由位于该节点分割超平面 左子空间/右子空间 内所有数据点所构成的k-d树 |
| parent | k-d树 | 父节点 |
1.3 算法的实现
输入:数据点集Data-set和其所在的空间Range
输出:Kd,类型为k-d tree
1、If Data-set为空,则返回空的k-d tree
2、调用节点生成程序:
(1)确定split域:对于所有描述子数据(特征矢量),统计它们在每个维上的数据方差。
以SURF特征为例,描述子为64维,可计算64个方差。挑选出最大值,对应的维就是split域的值。
数据方差大表明沿该坐标轴方向上的数据分散得比较开,在这个方向上进行数据分割有较好的分辨率;
(2)确定Node-data域:数据点集Data-set按其第split域的值排序。
位于正中间的那个数据点被选为Node-data。
此时新的Data-set’ = Data-set\Node-data(除去其中Node-data这一点)。
3、dataleft = {d属于Data-set’ && d[split] ≤ Node-data[split]}Left_Range =
{Range && dataleft} dataright = {d属于Data-set’ && d[split] > Node-data[split]}Right_Range
= {Range && dataright}
4.eft = 由(dataleft,Left_Range)建立的k-d tree,
即递归调用createKDTree(dataleft,Left_Range)。并设置left的parent域为Kd;
right = 由(dataright,Right_Range)建立的k-d tree,
即调用createKDTree(dataright,Right_Range)。并设置right的parent域为Kd。
- 实例:k-d树构建算法。
-
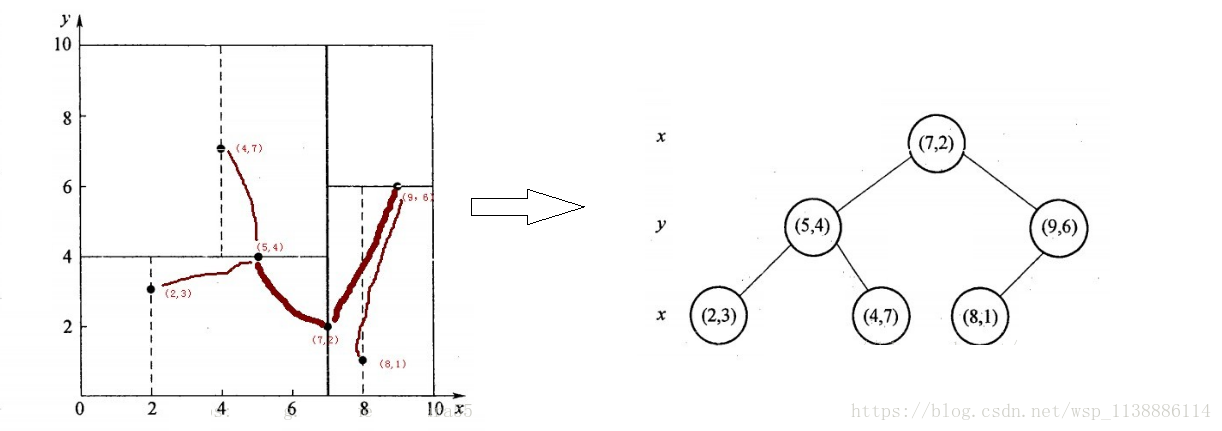
假设有6个二维数据点{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},数据点位于二维空间内,如下图所示。
为了能有效的找到最近邻,k-d树采用分而治之的思想,即将整个空间划分为几个小部分,
首先,粗黑线将空间一分为二,然后在两个子空间中,细黑直线又将整个空间划分为四部分,最后虚黑直线将这四部分进一步划分。
具体步骤
1、确定:split域=x。具体是:6个数据点在x,y维度上的数据方差分别为39,28.63,所以在x轴上方差更大,故split域值为x;
2、确定:Node-data = (7,2)。具体是:根据x维上的值将数据排序,6个数据的中值(所谓中值,即中间大小的值)为7,
所以Node-data域位数据点(7,2)。这样,该节点的分割超平面就是通过(7,2)并垂直于:split=x轴的直线x=7;
3、确定:左子空间和右子空间。具体是:分割超平面x=7将整个空间分为两部分:x<=7的部分为左子空间,
包含3个节点={(2,3),(5,4),(4,7)};另一部分为右子空间,包含2个节点={(9,6),(8,1)};
与此同时,经过对上面所示的空间划分之后,我们可以看出,点(7,2)可以为根结点,
从根结点出发的两条红粗斜线指向的(5,4)和(9,6)则为根结点的左右子结点,而(2,3),(4,7)则为(5,4)的左右孩子(通过两条细红斜线相连),
最后,(8,1)为(9,6)的左孩子(通过细红斜线相连)。如此,便形成了下面这样一棵k-d树
二、KD树基本操作
2.1、KD树查找
- KD树的查找算法:
-
在k-d树中进行数据的查找也是特征匹配的重要环节,其目的是检索在k-d树中与查询点距离最近的数据点。 对于kd树的检索,其具体过程为:
● 从根节点开始,将待检索的样本划分到对应的区域中(在kd树形结构中,从根节点开始查找,直到叶子节点,将这样的查找序列存储到栈中)
● 以栈顶元素与待检索的样本之间的距离作为最短距离min_distance
● 执行出栈操作:
◆ 向上回溯,查找到父节点,若父节点与待检索样本之间的距离小于当前的最短距离min_distance,则替换当前的最短距离min_distance
◆ 以待检索的样本为圆心(二维,高维情况下是球心),以min_distance为半径画圆,若圆与父节点所在的平面相割,则需要将父节点的另一棵子树进栈,重新执行以上的出栈操作
● 直到栈为空 - 举例
-
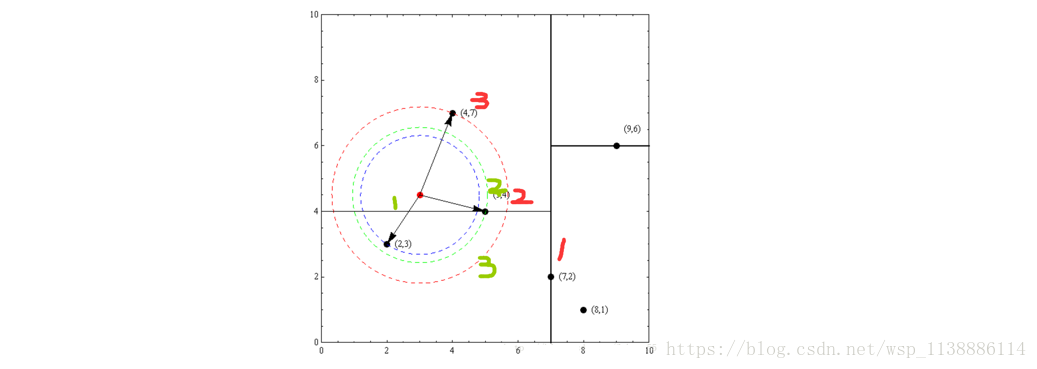
以先前构建好的kd树为例,查找目标点(3,4.5)的最近邻点。
同样先进行二叉查找,先从(7,2)查找到(5,4)节点,在进行查找时是由y = 4为分割超平面的,
由于查找点为y值为4.5,因此进入右子空间查找到(4,7),
形成搜索路径:(7,2)→(5,4)→(4,7)。
取(4,7)为当前最近邻点。以目标查找点为圆心,目标查找点到当前最近点的距离2.69为半径确定一个红色的圆。
然后回溯到(5,4),计算其与查找点之间的距离为2.06,则该结点比当前最近点距目标点更近,以(5,4)为当前最近点。
用同样的方法再次确定一个绿色的圆,可见该圆和y = 4超平面相交,所以需要进入(5,4)结点的另一个子空间进行查找。
(2,3)结点与目标点距离为1.8,比当前最近点要更近,所以最近邻点更新为(2,3),最近距离更新为1.8,同样可以确定一个蓝色的圆。
接着根据规则回退到根结点(7,2),蓝色圆与x=7的超平面不相交,因此不用进入(7,2)的右子空间进行查找。
至此,搜索路径回溯完,返回最近邻点(2,3),最近距离1.8。
- 如果实例点是随机分布的,kd树搜索的平均计算复杂度是O(logN)O(logN),这里N是训练实例数。kd树更适用于训练实例数远大于空间维数时的k近邻搜索。 当空间维数接近训练实例数时,它的效率会迅速下降,几乎接近线性扫描。
从上述标准的kd树查询过程可以看出其搜索过程中的“回溯”是由“查询路径”决定的,并没有考虑查询路径上一些数据点本身的一些性质。一个简单的改进思路就是将“查询路径”上的结点进行排序,如按各自分割超平面(也称bin)与查询点的距离排序,也就是说,回溯检查总是从优先级最高(Best Bin)的树结点开始。
- 具体步骤和思路如下:
-
● 在某一层,分割面是第ki维,分割值是kv,那么 abs(q[ki]-kv) 就是没有选择的那个分支的优先级,也就是计算的是那一维上的距离;
● 同时,从优先队列里面取节点只在某次搜索到叶节点后才发生,计算过距离的节点不会出现在队列的,比如1~10这10个节点,你第一次搜索到叶节点的路径是1-5-7,那么1,5,7是不会出现在优先队列的。换句话说,优先队列里面存的都是查询路径上节点对应的相反子节点,
比如:
搜索左子树,就把对应这一层的右节点存进队列。
此算法能确保优先检索包含最近邻点可能性较高的空间,此外,BBF机制还设置了一个运行超时限定。采用了BBF查询机制后,kd树便可以有效的扩展到高维数据集上。 - 事例
-
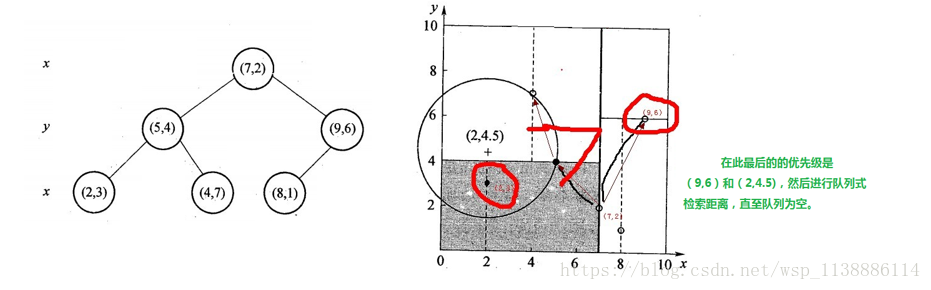
1、将(7,2)压入优先队列中;
2、提取优先队列中的(7,2),由于(2,4.5)位于(7,2)分割超平面的左侧,所以检索其左子结点(5,4)。
同时,根据BBF机制”搜索左/右子树,就把对应这一层的兄弟结点即右/左结点存进队列”,将其(5,4)对应的兄弟结点即右子结点(9,6)压人优先队列中,此时优先队列为{(9,6)},最佳点为(7,2);
然后一直检索到叶子结点(4,7),此时优先队列为{(2,3),(9,6)},“最佳点”则为(5,4);
3、提取优先级最高的结点(2,3),重复步骤2,直到优先队列为空。