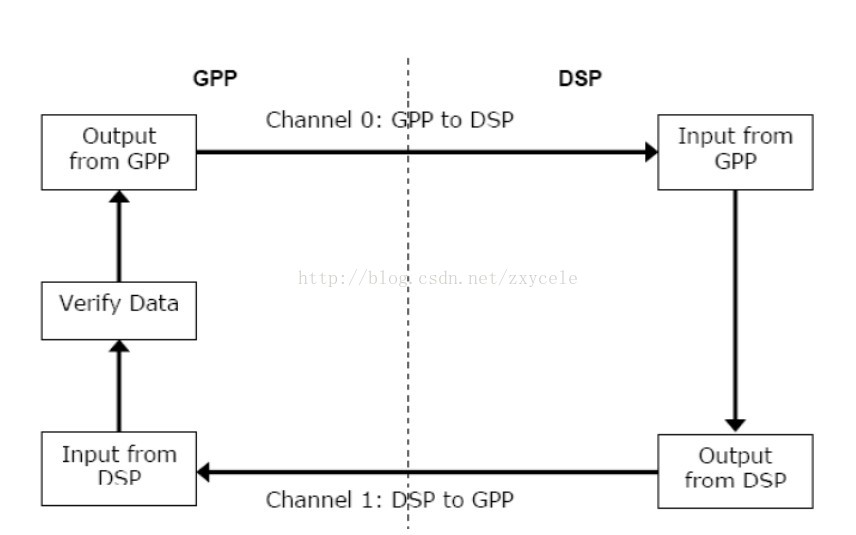
loop例程中数据流向:
loop.c是实现loop例程的文件。
在LOOP_Main()主函数中调用Loop_Create()、LOOP_Execute()、LOOP_Delete()三个函数来创建执行和删除。
LOOP_Create()中PROC_setup()初始化proc对象,PROC_attach()附加要使用的DSP,随后打开POOL
PROC_load() 下载代码到DSP端
status = CHNL_create (processorId, CHNL_ID_OUTPUT, &chnlAttrOutput) ;创建到DSP的channel
status = CHNL_create (processorId, CHNL_ID_INPUT, &chnlAttrInput) ; 创建来自DSP的channel
status = CHNL_allocateBuffer (processorId,
CHNL_ID_OUTPUT,
LOOP_Buffers, 分配传输到DSP的缓冲
LOOP_BufferSize ,
1) ;
temp = LOOP_Buffers [0] ;
for (i = 0 ; i < LOOP_BufferSize ; i++) { 初始化缓冲有效数据
*temp++ = XFER_CHAR ;}
status = LOOP_Execute (LOOP_NumIterations, processorId) ; 执行数据传输

----------PROC_start() //让DSP开始运行
----------status = CHNL_issue (processorId, CHNL_ID_OUTPUT, &LOOP_IOReq) ; //向DSP发送数据,把已经填充好的数据发送到channel
-----------status = CHNL_reclaim (processorId, //回收空缓冲
CHNL_ID_OUTPUT,
WAIT_FOREVER,
&LOOP_IOReq) ;
………………………………………………DSP端……………………………………………
在DSP端进行ISR初始化、DSPLINK初始化以后进入SWILOOP_create()
SWILOOP_create()
------------DSPLINK_init()
------------status=POOL_open(0,&poolObj)
------------ status = DEV_createDevice("/dsplink", &ZCPYDATA_FXNS, (Fxn) &ZCPYDATA_init, &devAttrs) ;
这一步是动态建立IOM 驱动,这个IOM驱动是什么东西。DSP/BIOS提供了两种设备驱动来使能应用程序与DSP周边进行通信传输:IOM和SIO/DEV。
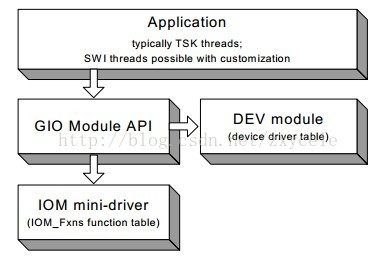
---------- status = DEV_createDevice("/dio_dsplink", &DIO_tskDynamicFxns, NULL, &dioDevAttrs);//

上图是在使用DIO 驱动和mini-driver 各个模块的依赖关系。
-------------*infoPtr = MEM_calloc (DSPLINK_SEGID, //为SWILOOP传输信息结构体分配
sizeof (SWILOOP_TransferInfo),
DSPLINK_BUF_ALIGN) ;
-------------GIO_Attrs gioAttrs = GIO_ATTRS ; //这一步是创建channel handle
info->gioInputChan = GIO_create (INPUT_CHANNEL,
IOM_INPUT,
NULL,
NULL,
&gioAttrs) ;
info->gioOutputChan = GIO_create (OUTPUT_CHANNEL,
IOM_OUTPUT,
NULL,
NULL,
&gioAttrs) ;
这个GIO又是什么东西呢?GIO模块是DSP/BIOS用于输入输出的模块,它是应用程序和mini-driver的通信基础。DEV模块负责维护系统设备驱动表,GIO模块通过使用函数来获得设备信息,比如说DEV_match。
GIO_create()是分配和初始化GIO对象。应用程序调用GIO_create 来建立GIO_Obj 对象和打开channel 通信。这个函数初始化I/Ochannel ,打开最底层的设备驱动channel。也创建了同步对象并存储在GIO_obj对象里。
----------- swiAttrs.fxn = loopbackSWI ; //这一段为发送和接收数据创建SWI
swiAttrs.arg0 = (Arg) info ;
swiAttrs.mailbox = INITIAL_MAILBOX_VAL ;
info->swi = SWI_create (&swiAttrs) ;
if (info->swi == NULL) {
status = SYS_EALLOC ;
SET_FAILURE_REASON (status) ;
}
----------loopbackSWI()
--------- for (i = 0 ; i < info->readWords ; i++) {//处理数据
info->outputBuffer [i] = info->inputBuffer [i] ;
--------- iomStatus = GIO_submit (info->gioInputChan, //提交读请求
IOM_READ,
info->inputBuffer,
(size_t *) &(info->bufferSize),
&(info->appReadCb)) ;
-------iomStatus = GIO_submit (info->gioOutputChan,
IOM_WRITE,
info->outputBuffer,
&numWordsToWrite,
&(info->appWriteCb)) ;
GIO_submin()是向mini-driver提交 GIO数据包,成功返回IOM_COMPLETED,如果请求被排列则返回IOM_PENDING。
GIO_write()同步写命令,应用程序使用这个函数写数据到通信channel。
-------- status = POOL_alloc (SAMPLE_POOL_ID,
(Ptr *) &(info->inputBuffer),
info->bufferSize) ;
if (status == SYS_OK) {
status = POOL_alloc (SAMPLE_POOL_ID,
(Ptr *) &(info->outputBuffer),
info->bufferSize) ;
为输入和输出分配缓冲区
SWILOOP_execute()
----------iomStatus = GIO_submit (info->gioInputChan,
IOM_READ,
info->inputBuffer,
(size_t *) &(info->bufferSize),
&(info->appReadCb)) ;
提交读请求
----------SWI_andn (info->swi, WRITE_MAILBOX_MASK) ;
这是SWI模型中的一个函数,SWI模块是软件中断管理,SWI_andn()是清除软件中断邮箱位,如果值为0则提交,它用于提交一个软件中断,
tskLoopTask = TSK_create(tskLoop, NULL, 0); //为TSKLOOP 应用程序创建任务
----------DSPLINK_init();
----------TSKLOOP_create()
----------POOL_open()
-----------status = DEV_createDevice("/dsplink", &ZCPYDATA_FXNS, (Fxn) &ZCPYDATA_init, &devAttrs) ;
动态创建IOM驱动
----------status = DEV_createDevice("/dio_dsplink", &DIO_tskDynamicFxns, NULL, &dioDevAttrs);
动态创建DIO适配器
---------- *infoPtr = MEM_calloc (DSPLINK_SEGID,
sizeof (TSKLOOP_TransferInfo),
DSPLINK_BUF_ALIGN) ;
分配TSKLOOP_TransferInfo,初始化并传递给其他应用程序参数
----------- info->numTransfers = numTransfers ;
info->bufferSize = xferBufSize ;
info->numBuffers = TSK_NUM_BUFFERS ;
-
-
-
-
-待续……