void tim3_init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
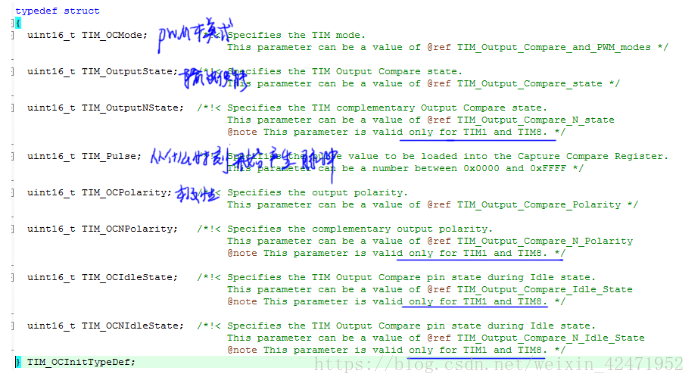
TIM_OCInitTypeDef TIM_OCInitStruct;
/***************************¶¨Ê±Æ÷»ù±¾¹¦ÄÜ************************************/
//ʹÄÜʱÖÓ
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
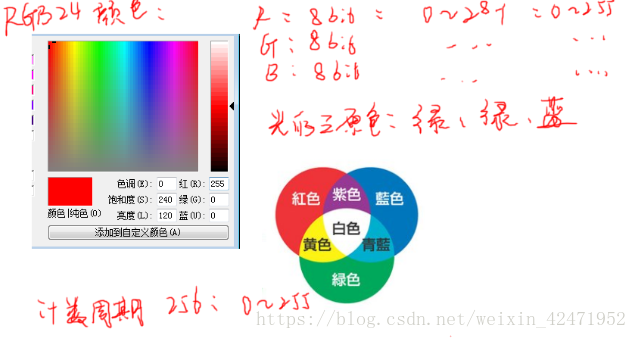
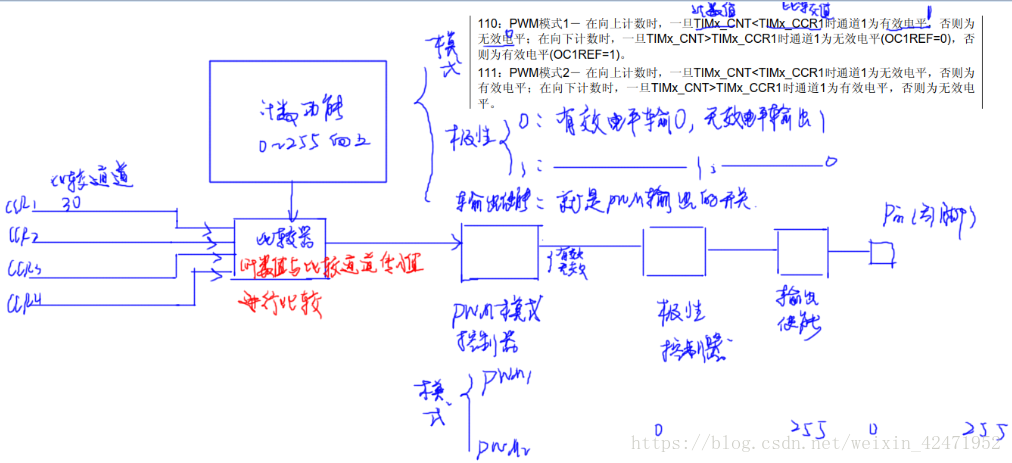
TIM_TimeBaseInitStruct.TIM_Period = 255;
TIM_TimeBaseInitStruct.TIM_Prescaler = 719;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
/***************************¶¨Ê±Æ÷»ù±¾¹¦ÄÜ************************************/
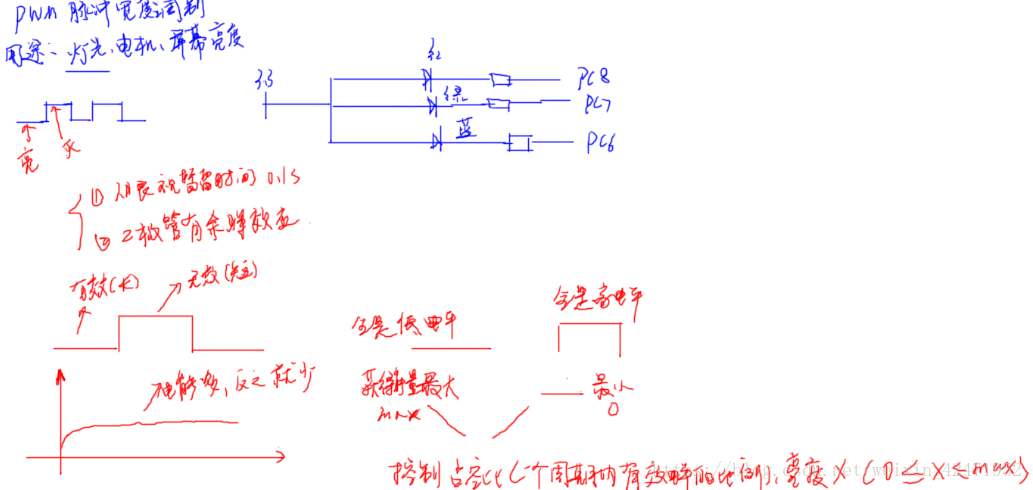
/***************************PWM¹¦ÄÜ************************************/
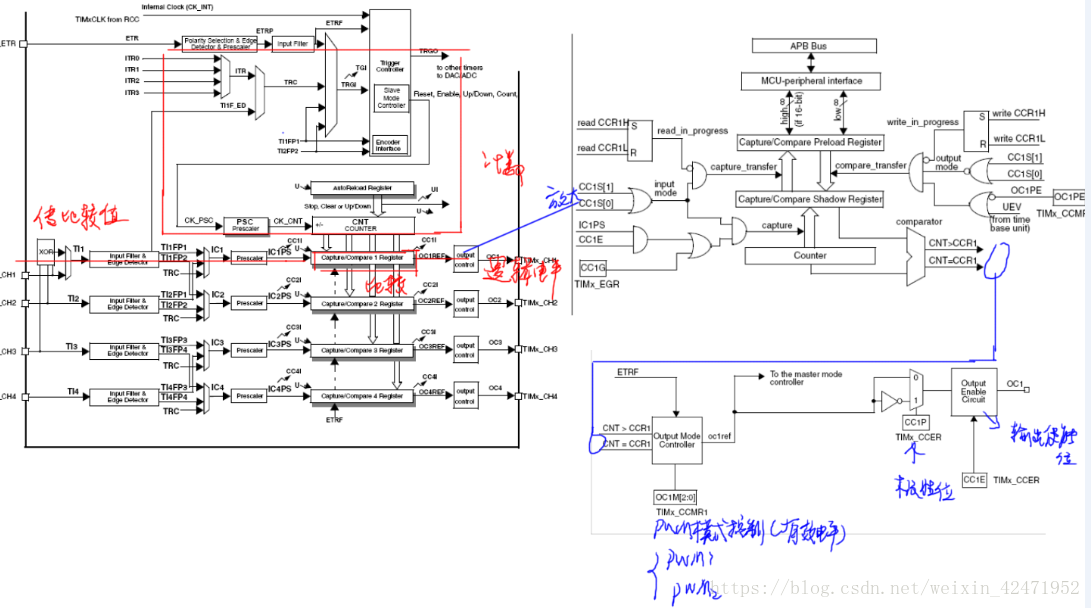
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStruct.TIM_Pulse = 0;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
//PWMµÄͨµÀ
TIM_OC1Init(TIM3, &TIM_OCInitStruct);
TIM_OC2Init(TIM3, &TIM_OCInitStruct);
TIM_OC3Init(TIM3, &TIM_OCInitStruct);
//void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
//void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
//void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
TIM_ARRPreloadConfig(TIM3, ENABLE);
/***************************PWM¹¦ÄÜ************************************/
//¶¨Ê±Æ÷ʹÄÜ
TIM_Cmd(TIM3,ENABLE);
}
int main(void)
{
rcc_init();
systick_init();
led_init();
uart1_init(); //Uart1³õʼ»¯
uart1_NVIC_init();
tim2_init();
tim2_NVIC_init();
tim3_init();
led_control(LED_GREEN,LED_ON);
while (1)
{
breath_led();
}
}void breath_led(void)
{
int i;
for(i = 0; i < 51; i++)
{
delay_ms(20);
TIM3->CCR2 = i * 5;
}
for(i = 51; i > 0; i--)
{
delay_ms(20);
TIM3->CCR2 = i * 5;
}
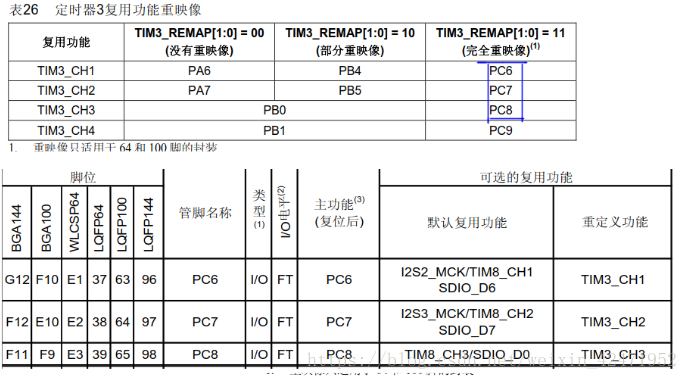
}重定义时,需要启用复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_USART1 | RCC_APB2Periph_AFIO, ENABLE);