Brisk(Binary Robust Invariant Scalable Keypoints)特征 相比于 SURF SIFT 有些步骤是相同的
构建尺度空间
特征点检测
FAST9-16寻找特征 连续 9-16 个点小于或大于当前值,就把其当作特征点的候选者
特征点定位
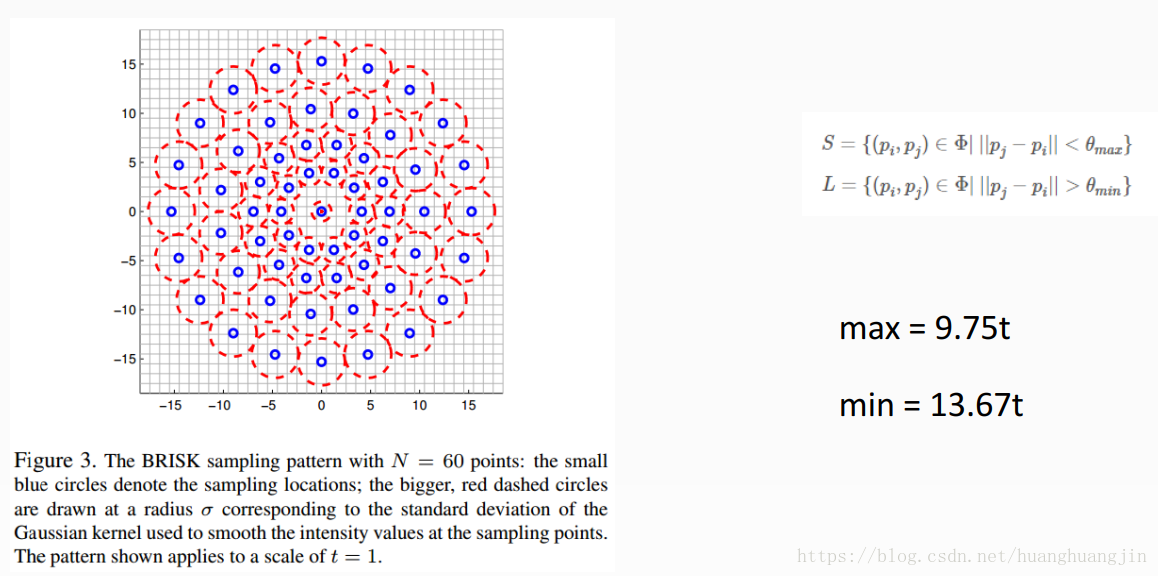
关键点描述子
代码
#include "../common/common.hpp"
void main(int argc, char** argv)
{
Mat img1 = imread(getCVImagesPath("images/box.png"), IMREAD_GRAYSCALE);
Mat img2 = imread(getCVImagesPath("images/box_in_scene.png"), IMREAD_GRAYSCALE);
imshow("box image", img1);
imshow("scene image", img2);
// extract BRISK features
Ptr<Feature2D> detector = BRISK::create(); // BRISK特征检测类
vector<KeyPoint> keypoints_obj;
vector<KeyPoint> keypoints_scene;
Mat descriptor_obj, descriptor_scene;
detector->detectAndCompute(img1, Mat(), keypoints_obj, descriptor_obj); // BRISK特征检测,并计算生成特征描述子
detector->detectAndCompute(img2, Mat(), keypoints_scene, descriptor_scene);
cout << "keypoints_obj.size=" << keypoints_obj.size() << endl; // keypoints_obj.size=1663
cout << "keypoints_scene.size=" << keypoints_scene.size() << endl; // keypoints_scene.size = 2785
// descriptor_obj depth = 0, type = 0, size = [64 x 1663]
cout << "descriptor_obj depth=" << descriptor_obj.depth() << ", type=" << descriptor_obj.type() << ", size=" << descriptor_obj.size() << endl;
// descriptor_scene depth = 0, type = 0, size = [64 x 2785]
cout << "descriptor_scene depth=" << descriptor_scene.depth() << ", type=" << descriptor_scene.type() << ", size=" << descriptor_scene.size() << endl;
// matching
BFMatcher matcher(NORM_L2);
vector<DMatch> matches;
matcher.match(descriptor_obj, descriptor_scene, matches); // 匹配
// draw matches
Mat matchesImg;
drawMatches(img1, keypoints_obj, img2, keypoints_scene, matches, matchesImg);
imshow("BRISK MATCH RESULT", matchesImg);
// BRISK 特征检测,其检测出来的特征是比较精准的
Mat girl = imread(getCVImagesPath("images/test1_3.png"), IMREAD_GRAYSCALE);
imshow("src2-25", girl);
vector<KeyPoint> keypoints;
detector->detect(girl, keypoints, Mat());
// draw key points
Mat resultImg;
drawKeypoints(girl, keypoints, resultImg, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("Brisk Key Points", resultImg);
waitKey(0);
}
效果图
