二、单变量线性回归(Linear Regression with One Variable)
2.1 模型表示
参考视频: 2 - 1 - Model Representation (8 min).mkv
我们的第一个学习算法是线性回归算法。在这段视频中,你会看到这个算法的概况,更重要的是你将会了解监督学习过程完整的流程。
让我们通过一个例子来开始:这个例子是预测住房价格的,我们要使用一个数据集,数据集包含俄勒冈州波特兰市的住房价格。在这里,我要根据不同房屋尺寸所售出的价格,画出我的数据集。比方说,如果你朋友的房子是1250平方尺大小,你要告诉他们这房子能卖多少钱。那么,你可以做的一件事就是构建一个模型,也许是条直线,从这个数据模型上来看,也许你可以告诉你的朋友,他能以大约220000(美元)左右的价格卖掉这个房子。这就是监督学习算法的一个例子。

它被称作监督学习是因为对于每个数据来说,我们给出了“正确的答案”,即告诉我们:根据我们的数据来说,房子实际的价格是多少,而且,更具体来说,这是一个回归问题。回归一词指的是,我们根据之前的数据预测出一个准确的输出值,对于这个例子就是价格,同时,还有另一种最常见的监督学习方式,叫做分类问题,当我们想要预测离散的输出值,例如,我们正在寻找癌症肿瘤,并想要确定肿瘤是良性的还是恶性的,这就是0/1离散输出的问题。更进一步来说,在监督学习中我们有一个数据集,这个数据集被称训练集。
我将在整个课程中用小写的m来表示训练样本的数目。
以之前的房屋交易问题为例,假使我们回归问题的训练集(Training Set)如下表所示:

我们将要用来描述这个回归问题的标记如下:
mm 代表训练集中实例的数量
xx 代表特征/输入变量

yy 代表目标变量/输出变量
(x,y)(x,y) 代表训练集中的实例
(x(i),y(i))(x(i),y(i)) 代表第ii 个观察实例
h代表学习算法的解决方案或函数也称为假设(hypothesis)
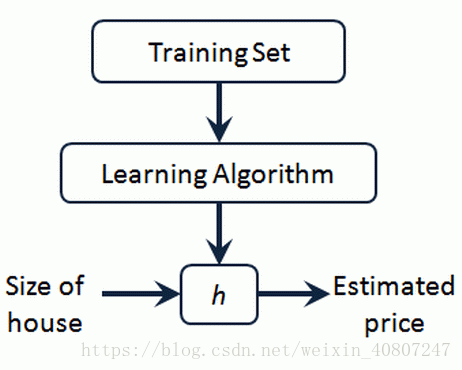
这就是一个监督学习算法的工作方式,我们可以看到这里有我们的训练集里房屋价格
我们把它喂给我们的学习算法,学习算法的工作了,然后输出一个函数,通常表示为小写 hh 表示。hh 代表hypothesis(假设),h表示一个函数,输入是房屋尺寸大小,就像你朋友想出售的房屋,因此 hh 根据输入的 xx值来得出 yy 值,yy 值对应房子的价格 因此,hh 是一个从xx 到 yy 的函数映射。
我将选择最初的使用规则hh代表hypothesis,因而,要解决房价预测问题,我们实际上是要将训练集“喂”给我们的学习算法,进而学习得到一个假设h,然后将我们要预测的房屋的尺寸作为输入变量输入给h,预测出该房屋的交易价格作为输出变量输出为结果。那么,对于我们的房价预测问题,我们该如何表达 hh?
一种可能的表达方式为:hθ(x)=θ0+θ1xhθ(x)=θ0+θ1x,因为只含有一个特征/输入变量,因此这样的问题叫作单变量线性回归问题。
2.2 代价函数
参考视频: 2 - 2 - Cost Function (8 min).mkv
在这段视频中我们将定义代价函数的概念,这有助于我们弄清楚如何把最有可能的直线与我们的数据相拟合。如图:

在线性回归中我们有一个像这样的训练集,m代表了训练样本的数量,比如 m = 47。而我们的假设函数,也就是用来进行预测的函数,是这样的线性函数形式:hθ(x)=θ0+θ1xhθ(x)=θ0+θ1x。
接下来我们会引入一些术语我们现在要做的便是为我们的模型选择合适的参数(parameters)θ0θ0 和 θ1θ1,在房价问题这个例子中便是直线的斜率和在 y 轴上的截距。
我们选择的参数决定了我们得到的直线相对于我们的训练集的准确程度,模型所预测的值与训练集中实际值之间的差距(下图中蓝线所指)就是建模误差(modeling error)。

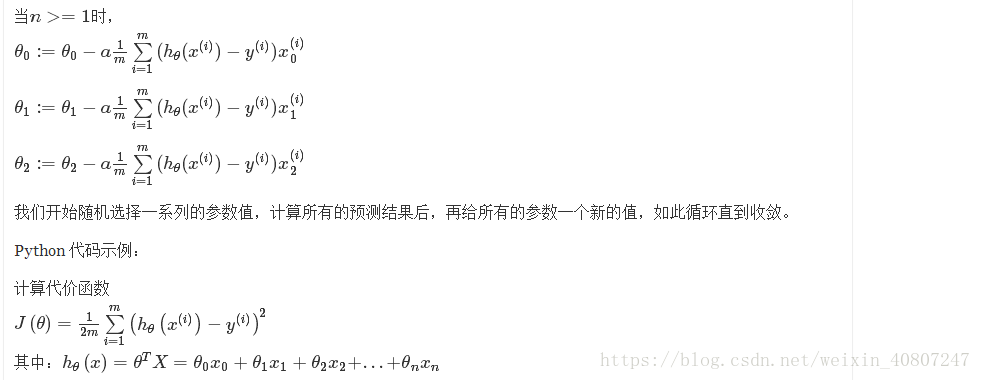
我们的目标便是选择出可以使得建模误差的平方和能够最小的模型参数。 即使得代价函数 J(θ0,θ1)=12m∑i=1m(hθ(x(i))−y(i))2J(θ0,θ1)=12m∑i=1m(hθ(x(i))−y(i))2最小。
我们绘制一个等高线图,三个坐标分别为θ0θ0和θ1θ1 和J(θ0,θ1)J(θ0,θ1):

则可以看出在三维空间中存在一个使得J(θ0,θ1)J(θ0,θ1)最小的点。
代价函数也被称作平方误差函数,有时也被称为平方误差代价函数。我们之所以要求出误差的平方和,是因为误差平方代价函数,对于大多数问题,特别是回归问题,都是一个合理的选择。还有其他的代价函数也能很好地发挥作用,但是平方误差代价函数可能是解决回归问题最常用的手段了。
在后续课程中,我们还会谈论其他的代价函数,但我们刚刚讲的选择是对于大多数线性回归问题非常合理的。
也许这个函数J(θ0,θ1)J(θ0,θ1)有点抽象,可能你仍然不知道它的内涵,在接下来的几个视频里,我们要更进一步解释代价函数J的工作原理,并尝试更直观地解释它在计算什么,以及我们使用它的目的。
2.3 代价函数的直观理解I
参考视频: 2 - 3 - Cost Function - Intuition I (11 min).mkv
在上一个视频中,我们给了代价函数一个数学上的定义。在这个视频里,让我们通过一些例子来获取一些直观的感受,看看代价函数到底是在干什么。


2.4 代价函数的直观理解II
参考视频: 2 - 4 - Cost Function - Intuition II (9 min).mkv
这节课中,我们将更深入地学习代价函数的作用,这段视频的内容假设你已经认识等高线图,如果你对等高线图不太熟悉的话,这段视频中的某些内容你可能会听不懂,但不要紧,如果你跳过这段视频的话,也没什么关系,不听这节课对后续课程理解影响不大。

代价函数的样子,等高线图,则可以看出在三维空间中存在一个使得J(θ0,θ1)J(θ0,θ1)最小的点。

通过这些图形,我希望你能更好地理解这些代价函数 J所表达的值是什么样的,它们对应的假设是什么样的,以及什么样的假设对应的点,更接近于代价函数J的最小值。
当然,我们真正需要的是一种有效的算法,能够自动地找出这些使代价函数J取最小值的参数θ0θ0和θ1θ1来。
我们也不希望编个程序把这些点画出来,然后人工的方法来读出这些点的数值,这很明显不是一个好办法。我们会遇到更复杂、更高维度、更多参数的情况,而这些情况是很难画出图的,因此更无法将其可视化,因此我们真正需要的是编写程序来找出这些最小化代价函数的θ0θ0和θ1θ1的值,在下一节视频中,我们将介绍一种算法,能够自动地找出能使代价函数J最小化的参数θ0θ0和θ1θ1的值。
2.5 梯度下降
参考视频: 2 - 5 - Gradient Descent (11 min).mkv
梯度下降是一个用来求函数最小值的算法,我们将使用梯度下降算法来求出代价函数J(θ0,θ1)J(θ0,θ1) 的最小值。
梯度下降背后的思想是:开始时我们随机选择一个参数的组合(θ0,θ1,......,θn)(θ0,θ1,......,θn),计算代价函数,然后我们寻找下一个能让代价函数值下降最多的参数组合。我们持续这么做直到到到一个局部最小值(local minimum),因为我们并没有尝试完所有的参数组合,所以不能确定我们得到的局部最小值是否便是全局最小值(global minimum),选择不同的初始参数组合,可能会找到不同的局部最小值。

想象一下你正站立在山的这一点上,站立在你想象的公园这座红色山上,在梯度下降算法中,我们要做的就是旋转360度,看看我们的周围,并问自己要在某个方向上,用小碎步尽快下山。这些小碎步需要朝什么方向?如果我们站在山坡上的这一点,你看一下周围,你会发现最佳的下山方向,你再看看周围,然后再一次想想,我应该从什么方向迈着小碎步下山?然后你按照自己的判断又迈出一步,重复上面的步骤,从这个新的点,你环顾四周,并决定从什么方向将会最快下山,然后又迈进了一小步,并依此类推,直到你接近局部最低点的位置。
批量梯度下降(batch gradient descent)算法的公式为:

其中α是学习率(learning rate),它决定了我们沿着能让代价函数下降程度最大的方向向下迈出的步子有多大,在批量梯度下降中,我们每一次都同时让所有的参数减去学习速率乘以代价函数的导数。

在梯度下降算法中,还有一个更微妙的问题,梯度下降中,我们要更新θ0θ0和θ1θ1 ,当 j=0 和j=1时,会产生更新,所以你将更新J(θ0)J(θ0)和J(θ1)J(θ1)。实现梯度下降算法的微妙之处是,在这个表达式中,如果你要更新这个等式,你需要同时更新θ0θ0和θ1θ1,我的意思是在这个等式中,我们要这样更新:
θ0θ0:= θ0θ0 ,并更新θ1θ1:= θ1θ1。
实现方法是:你应该计算公式右边的部分,通过那一部分计算出θ0θ0和θ1θ1的值,然后同时更新θ0θ0和θ1θ1。
让我进一步阐述这个过程:

在梯度下降算法中,这是正确实现同时更新的方法。我不打算解释为什么你需要同时更新,同时更新是梯度下降中的一种常用方法。我们之后会讲到,同步更新是更自然的实现方法。当人们谈到梯度下降时,他们的意思就是同步更新。
在接下来的视频中,我们要进入这个微分项的细节之中。我已经写了出来但没有真正定义,如果你已经修过微积分课程,如果你熟悉偏导数和导数,这其实就是这个微分项:
如果你不熟悉微积分,不用担心,即使你之前没有看过微积分,或者没有接触过偏导数,在接下来的视频中,你会得到一切你需要知道,如何计算这个微分项的知识。
下一个视频中,希望我们能够给出实现梯度下降算法的所有知识 。
2.6 梯度下降的直观理解
参考视频: 2 - 6 - Gradient Descent Intuition (12 min).mkv
在之前的视频中,我们给出了一个数学上关于梯度下降的定义,本次视频我们更深入研究一下,更直观地感受一下这个算法是做什么的,以及梯度下降算法的更新过程有什么意义。梯度下降算法如下图:
θj:=θj−α∂∂θjJ(θ)θj:=θj−α∂∂θjJ(θ)
描述:对$\theta 赋值,使得赋值,使得J\left( \theta \right)按梯度下降最快方向进行,一直迭代下去,最终得到局部最小值。其中按梯度下降最快方向进行,一直迭代下去,最终得到局部最小值。其中a$是学习率(learning rate),它决定了我们沿着能让代价函数下降程度最大的方向向下迈出的步子有多大。

对于这个问题,求导的目的,基本上可以说取这个红点的切线,就是这样一条红色的直线,刚好与函数相切于这一点,让我们看看这条红色直线的斜率,就是这条刚好与函数曲线相切的这条直线,这条直线的斜率正好是这个三角形的高度除以这个水平长度,现在,这条线有一个正斜率,也就是说它有正导数,因此,我得到的新的θ1θ1,θ1θ1更新后等于θ1θ1减去一个正数乘以aa。
这就是我梯度下降法的更新规则:θj:=θj−α∂∂θjJ(θ)θj:=θj−α∂∂θjJ(θ)
让我们来看看如果aa太小或aa太大会出现什么情况:
如果aa太小了,即我的学习速率太小,结果就是只能这样像小宝宝一样一点点地挪动,去努力接近最低点,这样就需要很多步才能到达最低点,所以如果aa太小的话,可能会很慢,因为它会一点点挪动,它会需要很多步才能到达全局最低点。
如果aa太大,那么梯度下降法可能会越过最低点,甚至可能无法收敛,下一次迭代又移动了一大步,越过一次,又越过一次,一次次越过最低点,直到你发现实际上离最低点越来越远,所以,如果aa太大,它会导致无法收敛,甚至发散。
现在,我还有一个问题,当我第一次学习这个地方时,我花了很长一段时间才理解这个问题,如果我们预先把θ1θ1放在一个局部的最低点,你认为下一步梯度下降法会怎样工作?
假设你将θ1θ1初始化在局部最低点,在这儿,它已经在一个局部的最优处或局部最低点。结果是局部最优点的导数将等于零,因为它是那条切线的斜率。这意味着你已经在局部最优点,它使得θ1θ1不再改变,也就是新的θ1θ1等于原来的θ1θ1,因此,如果你的参数已经处于局部最低点,那么梯度下降法更新其实什么都没做,它不会改变参数的值。这也解释了为什么即使学习速率aa保持不变时,梯度下降也可以收敛到局部最低点。
我们来看一个例子,这是代价函数J(θ)J(θ)。

我想找到它的最小值,首先初始化我的梯度下降算法,在那个品红色的点初始化,如果我更新一步梯度下降,也许它会带我到这个点,因为这个点的导数是相当陡的。现在,在这个绿色的点,如果我再更新一步,你会发现我的导数,也即斜率,是没那么陡的。随着我接近最低点,我的导数越来越接近零,所以,梯度下降一步后,新的导数会变小一点点。然后我想再梯度下降一步,在这个绿点,我自然会用一个稍微跟刚才在那个品红点时比,再小一点的一步,到了新的红色点,更接近全局最低点了,因此这点的导数会比在绿点时更小。所以,我再进行一步梯度下降时,我的导数项是更小的,θ1θ1更新的幅度就会更小。所以随着梯度下降法的运行,你移动的幅度会自动变得越来越小,直到最终移动幅度非常小,你会发现,已经收敛到局部极小值。
回顾一下,在梯度下降法中,当我们接近局部最低点时,梯度下降法会自动采取更小的幅度,这是因为当我们接近局部最低点时,很显然在局部最低时导数等于零,所以当我们接近局部最低时,导数值会自动变得越来越小,所以梯度下降将自动采取较小的幅度,这就是梯度下降的做法。所以实际上没有必要再另外减小aa。
这就是梯度下降算法,你可以用它来最小化任何代价函数JJ,不只是线性回归中的代价函数JJ。
在接下来的视频中,我们要用代价函数JJ,回到它的本质,线性回归中的代价函数。也就是我们前面得出的平方误差函数,结合梯度下降法,以及平方代价函数,我们会得出第一个机器学习算法,即线性回归算法。
2.7 梯度下降的线性回归
参考视频: 2 - 7 - GradientDescentForLinearRegression (6 min).mkv
在以前的视频中我们谈到关于梯度下降算法,梯度下降是很常用的算法,它不仅被用在线性回归上和线性回归模型、平方误差代价函数。在这段视频中,我们要将梯度下降和代价函数结合。我们将用到此算法,并将其应用于具体的拟合直线的线性回归算法里。
梯度下降算法和线性回归算法比较如图:

对我们之前的线性回归问题运用梯度下降法,关键在于求出代价函数的导数,即:


j=0j=0 时:

j=1j=1 时:
则算法改写成:

我们刚刚使用的算法,有时也称为批量梯度下降。实际上,在机器学习中,通常不太会给算法起名字,但这个名字”批量梯度下降”,指的是在梯度下降的每一步中,我们都用到了所有的训练样本,在梯度下降中,在计算微分求导项时,我们需要进行求和运算,所以,在每一个单独的梯度下降中,我们最终都要计算这样一个东西,这个项需要对所有m个训练样本求和。因此,批量梯度下降法这个名字说明了我们需要考虑所有这一"批"训练样本,而事实上,有时也有其他类型的梯度下降法,不是这种"批量"型的,不考虑整个的训练集,而是每次只关注训练集中的一些小的子集。在后面的课程中,我们也将介绍这些方法。
但就目前而言,应用刚刚学到的算法,你应该已经掌握了批量梯度算法,并且能把它应用到线性回归中了,这就是用于线性回归的梯度下降法。
如果你之前学过线性代数,有些同学之前可能已经学过高等线性代数,你应该知道有一种计算代价函数J最小值的数值解法,不需要梯度下降这种迭代算法。在后面的课程中,我们也会谈到这个方法,它可以在不需要多步梯度下降的情况下,也能解出代价函数J的最小值,这是另一种称为正规方程(normal equations)的方法。实际上在数据量较大的情况下,梯度下降法比正规方程要更适用一些。
现在我们已经掌握了梯度下降,我们可以在不同的环境中使用梯度下降法,我们还将在不同的机器学习问题中大量地使用它。所以,祝贺大家成功学会你的第一个机器学习算法。
在下一段视频中,告诉你泛化的梯度下降算法,这将使梯度下降更加强大。
2.8 接下来的内容
参考视频: 2 - 8 - What_'s Next (6 min).mkv
在接下来的一组视频中,我会对线性代数进行一个快速的复习回顾。如果你从来没有接触过向量和矩阵,那么这课件上所有的一切对你来说都是新知识,或者你之前对线性代数有所了解,但由于隔得久了,对其有所遗忘,那就请学习接下来的一组视频,我会快速地回顾你将用到的线性代数知识。
通过它们,你可以实现和使用更强大的线性回归模型。事实上,线性代数不仅仅在线性回归中应用广泛,它其中的矩阵和向量将有助于帮助我们实现之后更多的机器学习模型,并在计算上更有效率。正是因为这些矩阵和向量提供了一种有效的方式来组织大量的数据,特别是当我们处理巨大的训练集时,如果你不熟悉线性代数,如果你觉得线性代数看上去是一个复杂、可怕的概念,特别是对于之前从未接触过它的人,不必担心,事实上,为了实现机器学习算法,我们只需要一些非常非常基础的线性代数知识。通过接下来几个视频,你可以很快地学会所有你需要了解的线性代数知识。具体来说,为了帮助你判断是否有需要学习接下来的一组视频,我会讨论什么是矩阵和向量,谈谈如何加、减 、乘矩阵和向量,讨论逆矩阵和转置矩阵的概念。
如果你十分熟悉这些概念,那么你完全可以跳过这组关于线性代数的选修视频,但是如果你对这些概念仍有些许的不确定,不确定这些数字或这些矩阵的意思,那么请看一看下一组的视频,它会很快地教你一些你需要知道的线性代数的知识,便于之后编写机器学习算法和处理大量数据。
三、线性代数回顾(Linear Algebra Review)
3.1 矩阵和向量
参考视频: 3 - 1 - Matrices and Vectors (9 min).mkv
如图:这个是4×2矩阵,即4行2列,如mm为行,nn为列,那么m×nm×n即4×2

矩阵的维数即行数×列数
矩阵元素(矩阵项):

AijAij指第i行,第j列的元素。
向量是一种特殊的矩阵,讲义中的向量一般都是列向量,如:

为四维列向量(4×1)。
如下图为1索引向量和0索引向量,左图为1索引向量,右图为0索引向量,一般我们用1索引向量。


3.2 加法和标量乘法
参考视频: 3 - 2 - Addition and Scalar Multiplication (7 min).mkv
矩阵的加法:行列数相等的可以加。
例:

矩阵的乘法:每个元素都要乘

组合算法也类似。
3.3 矩阵向量乘法
参考视频: 3 - 3 - Matrix Vector Multiplication (14 min).mkv
矩阵和向量的乘法如图:m×nm×n的矩阵乘以n×1n×1的向量,得到的是m×1m×1的向量

算法举例:

3.4 矩阵乘法
参考视频: 3 - 4 - Matrix Matrix Multiplication (11 min).mkv
矩阵乘法:
m×nm×n矩阵乘以n×on×o矩阵,变成m×om×o矩阵。
如果这样说不好理解的话就举一个例子来说明一下,比如说现在有两个矩阵AA和BB,那么它们的乘积就可以表示为图中所示的形式。


3.5 矩阵乘法的性质
参考视频: 3 - 5 - Matrix Multiplication Properties (9 min).mkv
矩阵乘法的性质:
矩阵的乘法不满足交换律:A×B≠B×AA×B≠B×A
矩阵的乘法满足结合律。即:A×(B×C)=(A×B)×CA×(B×C)=(A×B)×C
单位矩阵:在矩阵的乘法中,有一种矩阵起着特殊的作用,如同数的乘法中的1,我们称这种矩阵为单位矩阵.它是个方阵,一般用 II 或者 EE 表示,本讲义都用 II 代表单位矩阵,从左上角到右下角的对角线(称为主对角线)上的元素均为1以外全都为0。如:
AA−1=A−1A=IAA−1=A−1A=I
对于单位矩阵,有AI=IA=AAI=IA=A
3.6 逆、转置
参考视频: 3 - 6 - Inverse and Transpose (11 min).mkv
矩阵的逆:如矩阵A是一个m×m矩阵(方阵),如果有逆矩阵,则:AA−1=A−1A=IAA−1=A−1A=I
我们一般在OCTAVE或者MATLAB中进行计算矩阵的逆矩阵。
矩阵的转置:设A为m×nm×n阶矩阵(即mm行nn列),第$i 行行j 列的元素是列的元素是a(i,j),即:,即:A=a(i,j)$
定义AA的转置为这样一个n×mn×m阶矩阵BB,满足B=a(j,i)B=a(j,i),即 b(i,j)=a(j,i)b(i,j)=a(j,i)(B的第ii行第jj列元素是AA的第jj行第ii列元素),记AT=BAT=B。(有些书记为A'=B)
直观来看,将A的所有元素绕着一条从第1行第1列元素出发的右下方45度的射线作镜面反转,即得到AA的转置。
例:

矩阵的转置基本性质:
(A±B)T=AT±BT(A±B)T=AT±BT
(A×B)T=BT×AT(A×B)T=BT×AT
(AT)T=A(AT)T=A
(KA)T=KAT(KA)T=KAT
matlab中矩阵转置:
直接打一撇,x=y'。
四、多变量线性回归(Linear Regression with Multiple Variables)
4.1 多维特征
参考视频: 4 - 1 - Multiple Features (8 min).mkv
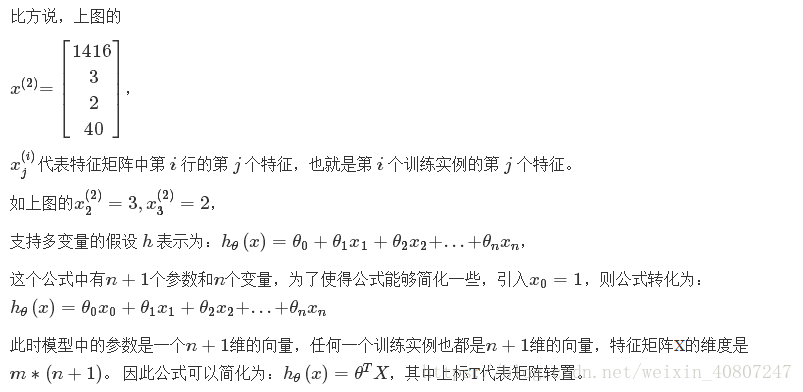
目前为止,我们探讨了单变量/特征的回归模型,现在我们对房价模型增加更多的特征,例如房间数楼层等,构成一个含有多个变量的模型,模型中的特征为(x1,x1,...,xn)(x1,x1,...,xn)。

增添更多特征后,我们引入一系列新的注释:
nn 代表特征的数量
x(i)x(i)代表第 ii 个训练实例,是特征矩阵中的第i行,是一个向量(vector)。
4.2 多变量梯度下降
参考视频: 4 - 2 - Gradient Descent for Multiple Variables (5 min).mkv

我们的目标和单变量线性回归问题中一样,是要找出使得代价函数最小的一系列参数。
多变量线性回归的批量梯度下降算法为:

即:

求导数后得到:

代码:
def computeCost(X, y, theta):
inner = np.power(((X * theta.T) - y), 2)
return np.sum(inner) / (2 * len(X))4.3 梯度下降法实践1-特征缩放
参考视频: 4 - 3 - Gradient Descent in Practice I - Feature Scaling (9 min).mkv
在我们面对多维特征问题的时候,我们要保证这些特征都具有相近的尺度,这将帮助梯度下降算法更快地收敛。
以房价问题为例,假设我们使用两个特征,房屋的尺寸和房间的数量,尺寸的值为 0-2000平方英尺,而房间数量的值则是0-5,以两个参数分别为横纵坐标,绘制代价函数的等高线图能,看出图像会显得很扁,梯度下降算法需要非常多次的迭代才能收敛。

解决的方法是尝试将所有特征的尺度都尽量缩放到-1到1之间。如图:

最简单的方法是令:

其中 μnμn是平均值,snsn是标准差。
4.4 梯度下降法实践2-学习率
参考视频: 4 - 4 - Gradient Descent in Practice II - Learning Rate (9 min).mkv
梯度下降算法收敛所需要的迭代次数根据模型的不同而不同,我们不能提前预知,我们可以绘制迭代次数和代价函数的图表来观测算法在何时趋于收敛。

也有一些自动测试是否收敛的方法,例如将代价函数的变化值与某个阀值(例如0.001)进行比较,但通常看上面这样的图表更好。
梯度下降算法的每次迭代受到学习率的影响,如果学习率
α过小,则达到收敛所需的迭代次数会非常高;如果学习率
α过大,每次迭代可能不会减小代价函数,可能会越过局部最小值导致无法收敛。
通常可以考虑尝试些学习率:
α=0.01,0.03,0.1,0.3,1,3,10
4.5 特征和多项式回归
参考视频: 4 - 5 - Features and Polynomial Regression (8 min).mkv
如房价预测问题,




或者三次方模型:
通常我们需要先观察数据然后再决定准备尝试怎样的模型。 另外,我们可以令:

从而将模型转化为线性回归模型。
根据函数图形特性,我们还可以使:

注:如果我们采用多项式回归模型,在运行梯度下降算法前,特征缩放非常有必要。
4.6 正规方程
参考视频: 4 - 6 - Normal Equation (16 min).mkv
到目前为止,我们都在使用梯度下降算法,但是对于某些线性回归问题,正规方程方法是更好的解决方案。如:

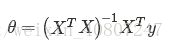
正规方程是通过求解下面的方程来找出使得代价函数最小的参数的:
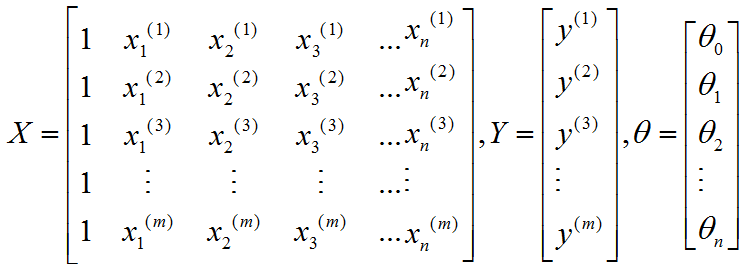
假设我们的训练集特征矩阵为 XX(包含了 x0=1x0=1)并且我们的训练集结果为向量 y
y,则利用正规方程解出向量


以下表示数据为例:

即:

运用正规方程方法求解参数:

在 Octave 中,正规方程写作:
pinv(X'*X)*X'*y注:对于那些不可逆的矩阵(通常是因为特征之间不独立,如同时包含英尺为单位的尺寸和米为单位的尺寸两个特征,也有可能是特征数量大于训练集的数量),正规方程方法是不能用的。
梯度下降与正规方程的比较:
| 梯度下降 | 正规方程 |
|---|---|
| 需要选择学习率 α |
不需要 |
| 需要多次迭代 | 一次运算得出 |
| 当特征数量n大时也能较好适用 | 需要计算(XTX)−1(XTX)−1 如果特征数量n较大则运算代价大,因为矩阵逆的计算时间复杂度为O(n3),通常来说当 n小于10000 时还是可以接受的 |
| 适用于各种类型的模型 | 只适用于线性模型,不适合逻辑回归模型等其他模型 |
总结一下,只要特征变量的数目并不大,标准方程是一个很好的计算参数
θ的替代方法。具体地说,只要特征变量数量小于一万,我通常使用标准方程法,而不使用梯度下降法。
随着我们要讲的学习算法越来越复杂,例如,当我们讲到分类算法,像逻辑回归算法,我们会看到,
实际上对于那些算法,并不能使用标准方程法。对于那些更复杂的学习算法,我们将不得不仍然使用梯度下降法。因此,梯度下降法是一个非常有用的算法,可以用在有大量特征变量的线性回归问题。或者我们以后在课程中,会讲到的一些其他的算法,因为标准方程法不适合或者不能用在它们上。但对于这个特定的线性回归模型,标准方程法是一个比梯度下降法更快的替代算法。所以,根据具体的问题,以及你的特征变量的数量,这两种算法都是值得学习的。
正规方程的python实现:
import numpy as np
def normalEqn(X, y):
theta = np.linalg.inv(X.T@X)@X.T@y #X.T@X等价于X.T.dot(X)
return theta正规方程 Normal Equation
相比較梯度下降採用多次迭代逼近的方式。normal equation採用矩阵运算能够直接求解出參数。先介绍下什么是normal equation,如果一个数据集X有m个样本,n个特征。则如果函数为:
。数据集X的特征向量表示为:
但仅仅有方阵才有可能存在逆矩阵(不熟悉定理的同学建议去补补线性代数),因此能够通过左乘 使等式变成
,因此
,有同学可能会有疑问
不一定存在啊,确实是,可是
极少不存在,后面会介绍
不存在的处理方法,先别着急。如今你仅仅须要明确为什么
就能够了。而且记住。
4.7 正规方程及不可逆性(可选)
参考视频: 4 - 7 - Normal Equation Noninvertibility (Optional) (6 min).mkv
在这段视频中谈谈正规方程 ( normal equation ),以及它们的不可逆性。
由于这是一种较为深入的概念,并且总有人问我有关这方面的问题,因此,我想在这里来讨论它,由于概念较为深入,所以对这段可选材料大家放轻松吧,也许你可能会深入地探索下去,并且会觉得理解以后会非常有用。但即使你没有理解正规方程和线性回归的关系,也没有关系。
我们要讲的问题如下:
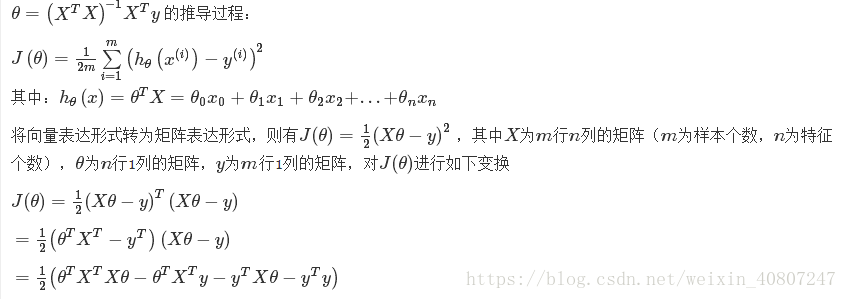
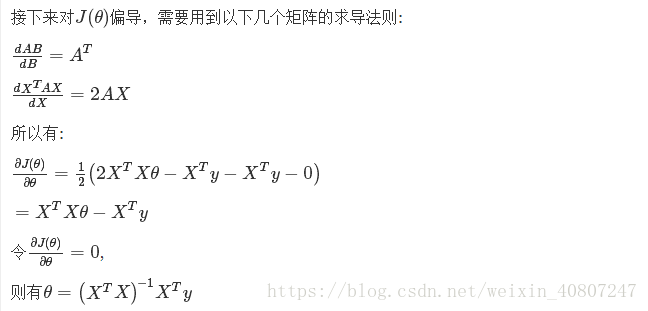
备注:本节最后我把推导过程写下。
有些同学曾经问过我,当计算 θθ=inv(X'X ) X'y ,那对于矩阵X′X的结果是不可逆的情况咋办呢?
如果你懂一点线性代数的知识,你或许会知道,有些矩阵可逆,而有些矩阵不可逆。我们称那些不可逆矩阵为奇异或退化矩阵。
问题的重点在于X′X的不可逆的问题很少发生,在Octave里,如果你用它来实现
θ的计算,你将会得到一个正常的解。在Octave里,有两个函数可以求解矩阵的逆,一个被称为pinv(),另一个是inv(),这两者之间的差异是些许计算过程上的,一个是所谓的伪逆,另一个被称为逆。使用pinv() 函数可以展现数学上的过程,这将计算出
θ的值,即便矩阵X′X是不可逆的。
在pinv() 和 inv() 之间,又有哪些具体区别呢 ?
其中inv() 引入了先进的数值计算的概念。例如,在预测住房价格时,如果x1是以英尺为尺寸规格计算的房子,x2
是以平方米为尺寸规格计算的房子,同时,你也知道1米等于3.28英尺 ( 四舍五入到两位小数 ),这样,你的这两个特征值将始终满足约束:
第二个原因是,在你想用大量的特征值,尝试实践你的学习算法的时候,可能会导致矩阵X′X的结果是不可逆的。
具体地说,在m小于或等于n的时候,例如,有m等于10个的训练样本也有n等于100的特征数量。要找到适合的(n+1) 维参数矢量θ,这将会变成一个101维的矢量,尝试从10个训练样本中找到满足101个参数的值,这工作可能会让你花上一阵子时间,但这并不总是一个好主意。因为,正如我们所看到你只有10个样本,以适应这100或101个参数,数据还是有些少。
稍后我们将看到,如何使用小数据样本以得到这100或101个参数,通常,我们会使用一种叫做正则化的线性代数方法,通过删除某些特征或者是使用某些技术,来解决当m比n小的时候的问题。即使你有一个相对较小的训练集,也可使用很多的特征来找到很多合适的参数。
总之当你发现的矩阵X′X的结果是奇异矩阵,或者找到的其它矩阵是不可逆的,我会建议你这么做。
首先,看特征值里是否有一些多余的特征,像这些x1和x2是线性相关的,互为线性函数。同时,当有一些多余的特征时,可以删除这两个重复特征里的其中一个,无须两个特征同时保留,将解决不可逆性的问题。因此,首先应该通过观察所有特征检查是否有多余的特征,如果有多余的就删除掉,直到他们不再是多余的为止,如果特征数量实在太多,我会删除些 用较少的特征来反映尽可能多内容,否则我会考虑使用正规化方法。
如果矩阵X′X是不可逆的,(通常来说,不会出现这种情况),如果在Octave里,可以用伪逆函数pinv() 来实现。这种使用不同的线性代数库的方法被称为伪逆。即使X′X结果是不可逆的,但算法执行的流程是正确的。总之,出现不可逆矩阵的情况极少发生,所以在大多数实现线性回归中,出现不可逆的问题不应该过多的关注XTX是不可逆的。
增加内容: