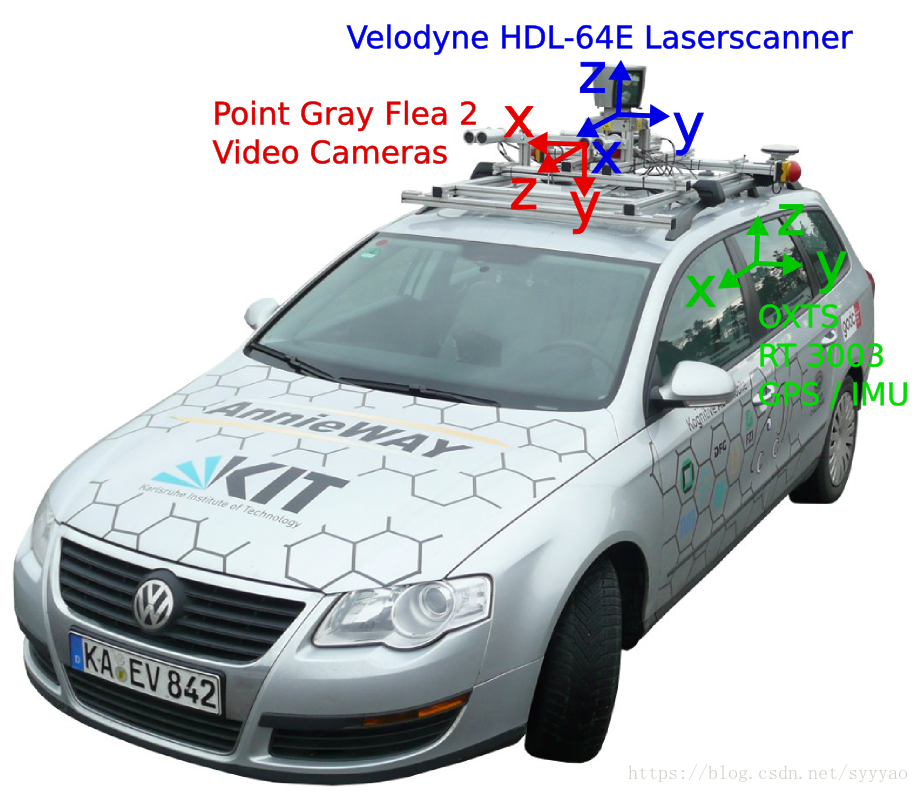
1、KITTI数据集采集平台:
KITTI数据采集平台包括2个灰度摄像机,2个彩色摄像机,一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统。坐标系转换原理参见click。KITTI提供的数据中都包含三者的标定文件,不需人工转换。

2、KITTI数据集,label文件解析:
Car 0.00 0 -1.84 662.20 185.85 690.21 205.03 1.48 1.36 3.51 5.35 2.56 58.84 -1.75
第1个字符串:代表物体类别
'Car', 'Van', 'Truck','Pedestrian', 'Person_sitting', 'Cyclist','Tram', 'Misc' or 'DontCare'
注意:’DontCare’ 标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。
第2个数:代表物体是否被截断,从0(非截断)到1(截断)浮动,其中truncated指离开图像边界的对象
第3个数:代表物体是否被遮挡,整数0,1,2,3表示被遮挡的程度
0:完全可见 1:小部分遮挡 2:大部分遮挡 3:完全遮挡(unknown)
第4个数:alpha,物体的观察角度,范围:-pi~pi
第5~8这4个数:物体的2维边界框,左上角和右下角的像素坐标
第9~11这3个数:3维物体的尺寸,高、宽、长(单位:米)
第12~14这3个数:3维物体的位置 x,y,z(在照相机坐标系下,单位:米)
第15个数:3维物体的空间方向:rotation_y,在照相机坐标系下,相对于y轴的旋转角,范围:-pi~pi
有些有第16个数:检测的置信度 , 仅用于结果:浮点,p / r曲线所需,越高越好