大家好,好快哦,今天是第五讲了,现在的时间是2018年5月27日,很快5月份就结束了,也就是说半年的时间就过去了,我过年的事儿还能记住呢。曾经有一个姓张的同学说过,时间随着年龄的增长会越来越快。以1岁时候过一年的时间来说,要是20岁就只有二十分之一的长度了。速度快了20倍。这个理论很有意思。我这个快30岁的人,时间确实过的飞快啊。
先说一下上节课的问题,上节课在开闭运算的时候有一个第八个参数叫做:morphologyDefaultBorderValue() ,这个参数是判断你是腐蚀还是膨胀,之前我们定义了超出边缘的话,我们假定为一个常数值。如果是膨胀的话那么边缘的常数值就是低亮(全0),如果是腐蚀的话就是高亮(全1)。它会返回一个64位的浮点数值(全0或者全1),之后根据我们图像的颜色深度,我们再改回32、16或者8位。
今天我要讲的内容是canny边缘检测。首先先说件事儿,我们的公众平台已经这么多人关注了,你们只看不转可不道义哦,你们学会了知识,在知网发表了几篇文,拿到了奖学金,我不需要你们的感谢,你们转发几条到朋友圈帮我宣传一下总可以吧?这里也给各位抱拳了。这也是为了更多中国人民能够学习到知识,把知识普及。促进我国的发展做贡献了!
废话就不说了,说一下canny吧,先说一下什么叫canny检测,canny是一个人,澳大利亚的人,这个人是一个天才,它发明了一种方法,能够把图片中的轮廓从图片中剥离出去。那么canny检测就很好理解了,检测啥?当然是检测图像的轮廓边缘啊。所以canny检测又称为边缘检测算法。那么这个算法是怎么进行计算的呢?其实它分为了5部分:
高斯滤波
首先第一部分是高斯滤波。我们在第三讲中说过了,滤波分为高通和低通滤波,低通滤波是进行去噪声用的。而计算方式是用一张图片与低通滤波器进行卷积。之前我们自己创造了一个滤波器:
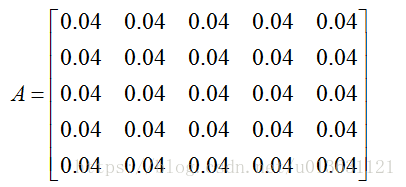
这个是5*5的一个滤波器,所有的元素之和为1,这样的滤波器就是低通滤波器。然而我们一般不需要自己创造一个滤波器,而是用其它人创造好的东西,直接拿来用,这样的效果也比自己创造的好。于是我们就引入了高斯滤波器,他也是低通滤波器的一种。
那么高斯滤波器是什么样子的呢?其实就是基于高斯分布的滤波器,高斯分布也叫正态分布,X、Y两个变量的正态分布计算公式如下:

一般来说,在canny算法中是一个3*3的滤波器(必须是奇数),所以我们假定卷积核是一个3*3的矩阵,中心点的坐标是(2,2),那么我们可以定义卷积核内每一个小矩形格的坐标:
(1,1) |
(1,2) |
(1,3) |
(2,1) |
(2,2) |
(2,3) |
(3,1) |
(3,2) |
(3,3) |
那么这个矩阵里面对应正态分布计算公式的u1,u2,σ1,σ2怎么计算呢,我们先说一下u1,u2,这个说白了就是中心的位置,一维的正态分布就是中心点的坐标哦!二维同样也是的哦!那么中心点的位置是哪里呢?不用多说,当然是中央啦,也就是第二行第二列,所以u1=2,u2=2,如果它不是一个3*3的,比如5*5的卷积核,也就是2*2+1,2*2+1的卷积核,我们的u1=u2=2+1=3也就是第三行第三列。我们把2*2+1,2*2+1扩展一下,变成(2k+1)*(2k+1)的卷积核,那么它的u1=k+1,u2=k+1。
说完了u1,u2,我们再说一下σ1,σ2,我们假定的是这两个值是相等的,都等于:
σ= 0.3*((ksize-1)*0.5 - 1) + 0.8,比如我们是3*3的核,那么σ1,σ2就都为0.8。
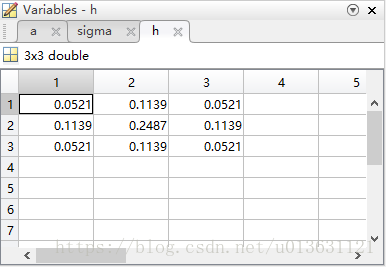
这样我们的参数都确定好了,那么我们把卷积核内的坐标都带入进去,不就能把每一个小格子里面的H给就出来了么?求出的结果如下:
之后,我们要进行归一化处理,怎么归一化?这里和标准归一化有点区别。这里首先是用第一行第一列的数据的倒数除以里面的每一个数据,得到:
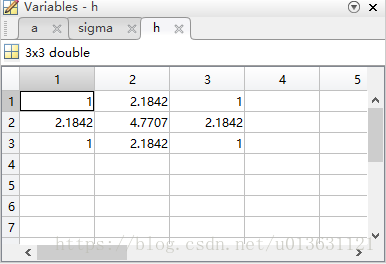
最后,我们保留整数位,舍弃小数位得到:
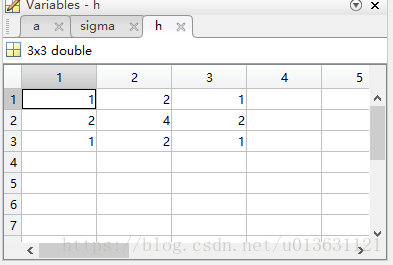
这样一个3*3的高斯卷积核就制作完毕了。
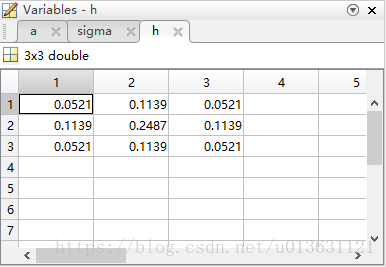
但是我们在canny里面用的高斯卷积和正常的卷积核还是有一些出路,出路就在我们归一化的时候,我们不是除以第一个数据,而是除以所有得到的数据的和的导数,然后也不舍弃小数。首先我们同理得到用正态分布公式计算的结果:
然后我们把每一个数除以所有数据的和:
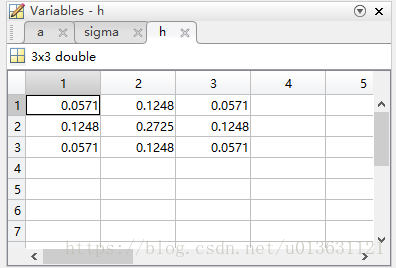
这样就获得了canny的卷积核了。
接下来我们导入一张想要获取边缘信息的图片,然后与高斯卷积核做卷积,得到卷积后去除噪声的图像。(估计卷积之后也就是别人说的那样:垃圾图片进,垃圾图片出)
这样第一步完成了。
计算梯度
第二部分是计算图像边缘的梯度,什么叫梯度,就是函数下降最快的方向,用数学表达式就是:
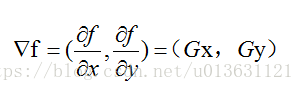
梯度的幅值和方向就是:
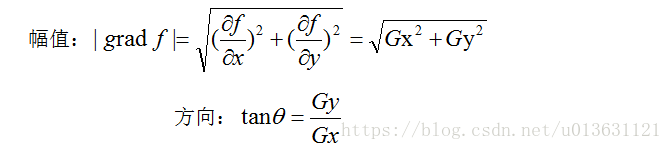
我们知道梯度方向就是两个偏导数之比,但是我们怎么求这个偏导数呢,我们于是引入了sobel算子:
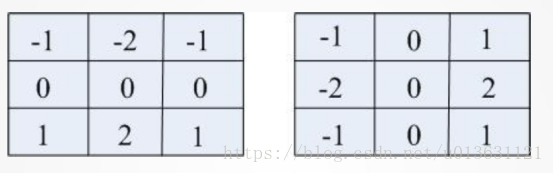
这两个就分别是x方向以及y方向的卷积核,也成sobel算子。
至于为什么卷积核的数据是这几个数呢。这里面篇幅比较少,我就简单讲解一下吧:
首先我们假定有一张图片的部分3*3的图片矩阵:
A |
B |
C |
D |
E |
F |
G |
H |
I |
我们把它的坐标定为:
(x-1,y+1) |
(x,y+1) |
(x+1,y+1) |
(x-1,y) |
(x,y) |
(x+1,y) |
(x-1,y-1) |
(x,y-1) |
(x+1,y-1) |
我们假设想要求E点的梯度,那么我们不知道梯度方向是啥,因为这TMD全是离散的数据,那么我们怎么办?Sobel算子的发明人就有个一个想法(也就是下面这个学霸),我们假设它的方向有4个分别是AI方向:
这四个方向分别是(A,I) (B,H) (C,G) (F,D),然后我们把四个方向给求出来:
(A,I)就是:
[((x-1)-(x+1)),((y+1)-(y-1))]=[-2,2],约分得到[-1,1]。
(B,H)就是:
[(x-x),((y+1)-(y-1))]=[0,2],约分得到[0,1]。
(C,G)就是:
[((x+1)-(x-1)),((y+1)-(y-1))]=[2,2],约分得到[1,1]。
(F,D)就是:
[((x-1)-(x+1)),y-(y)]=[2,0],约分得到[1,0]。
这四个方向哪个是梯度的方向啊?我们也不知道,可能有一个是,也有可能都不是,那么我们怎么办?
我们假设图片上面最中间的值为f(x,y),那么A,I两点就分别是f(x-1,y+1),f(x+1,y-1)。这两个点的距离是4,为啥,数格子,最短路径是4.也就是x两个格子,y两个格子(因为是离散数据,不能走斜线)。我们用这两个点的数据相减,然后除以4会得到:
f(x-1,y+1)-f(x+1,y-1)/4=(A-I)/4
我们称为AI的方向导数,也就是AI的变化率。
导数值我们求出来了,但是我们这个是一个标量,所以接下来我们要把这个数与方向相乘[-1,1],获得AI的梯度值,至于为什么相乘就是梯度值,我也不大清楚,应该是作者定的吧。同理我们把(B,H) (C,G) (F,D)都给它求出来,我们得到:
(C-G)/4 * [ 1, 1]
(A-I)/4 * [-1, 1]
(B-H)/2 * [ 0, 1]
(F-D)/2 * [ 1, 0]
这些值我们求完之后呢,我们给这四个值加和,加和之后我们应该除以4求一个平均值作为梯度。但是我们的卷积核是整数,我们不能除,所以我们选择乘以4,给这个平均值扩大16倍,比如X坐标方向的值:
Gx = [(c-g-a+i)/4 + (f-d)/2, (c-g+a-i)/4 + (b-h)/2]
Gx' = 4*Gx = [c-g-a+i + 2*(f-d), c-g+a-i + 2*(b-h)]
然后我们把相应个字母前面的系数带入到对应的矩阵中,就会得到卷积核:
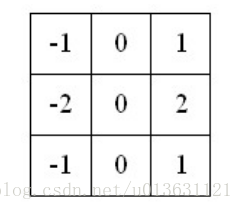
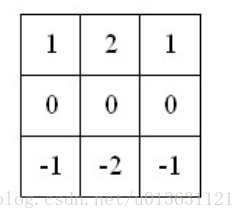
同理Y的卷积核也可以求出:
至于上面的推导过程,大家不懂的话没有事儿,因为本人也是很懵逼的,尤其是(C-G)/4 * [ 1, 1]相乘,我一直就想不明白,如果大家明白请告诉我哈!
说了这么多,我们还是说以下怎么计算梯度吧:
其实,我们上面已经告诉了,就是4*Gx = [c-g-a+i + 2*(f-d), c-g+a-i + 2*(b-h)] ,也就是我们用高斯处理后的图像与sobel卷积核做卷积,一共有两个卷积核,做卷积后会得出Gx,Gy两个方向的梯度。梯度方向垂直方向就是边缘方向。
非极大值抑制
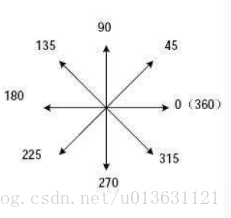
我们计算完成梯度之后,我们要做的就是边缘检测了,怎么检测?首先第一步是要将这张图片的边缘离散化为上下左右斜8个方向:
接下来求出各个方向的梯度这个梯度值的求法和上面的sobel算子差不多,比如90度的话就是用f(90)-f(0)/1,然后乘以它们之间的方向[0,1]。这样就OK了。其它的方向也是如此,我们知道了这个方向以后,下一步是利用公式:
我们Gy,Gx已经用sobel算子求出来了,然后8个方向的梯度G也求出来了,接下来我们假定:
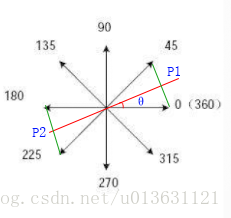
梯度的方向会与G45,G0交于点P1,G225,G180交与点P2,这两个点怎么算?首先我们要以Gy为纵坐标,Gx为横坐标,把G45,G0画到坐标上面,然后我们把这两个点连线,形成一个一次函数Gy=K1*Gx+b1。
然后我们把Gy,Gx的方向作为一个正比例函数Gy=k2*Gx,然后联立,就会求出P1点的坐标。
同理,我们把G225,G180画到坐标上面,然后我们把这两个点连线,形成一个一次函数,然后与Gy,Gx的方向的正比例函数联立,这样P2坐标就求出来了。
接下来我们要判断边缘了:
我们用G(Gy,Gx)与我们就出来的P1,P2进行比较,如果G比P1且P2都大的话,那么说明它可能是边缘,并记录下来。如果要是比其中一个小的话,那就不成立了,直接判断不是边缘!这个方法就叫做非最大值抑制,也就是比其中一个小就给它干掉!
双阈值检测
在非最大值抑制过后,如果这个像素被检测出来可能边缘,那我们还要对它进行的是双阈值检测,怎么检测呢,我们需要手动定义两个阈值,一个是高阈值,一个是低阈值。然后我们用G(Gy,Gx)与阈值进行比较,如果G比高阈值大,那么它就是一个强边缘,如果比高阈值小但是比低阈值大,那么它就是弱边缘。如果比低阈值都小,那么直接判断这个不是边缘。然后把可能是边缘的值都记录下来。
孤立低阈值
我们就这样,可以使用上面的方法检测图片中第一行第一列的像素。但是我们强边缘我们认为一定是边缘了,但是弱边缘一定是边缘吗?不一定,它还需要与其它地方相互比较。我们检测完成第一个像素之后,下一步就是往左边移动一格,检测第二个位置。也是前面4个过程计算完毕。依次类推,第一行最后一格检测完毕后。返回第一行第一列,然后向下移动一格,检测第二行第一列,一直就这么干,直到所有元素都检测完毕。我们检测出一堆边缘。然后我们返回第一个像素,寻找弱边缘的元素,找到一个之后,我们查看弱边缘像素及其8方向的像素,也就是上下左右斜,看看有没有一个元素是强边缘,如果有一个强边缘,那么它就是边缘,如果一个也没有,那么认定它不是边缘。就这样把所有弱边缘过一遍,并且记录。
我们把记录的边缘值高亮显示,其它的值都变为低亮。这样边缘就出来了。
最后我们附上代码,这个代码是canny算法的代码:
首先我们有一张图(还是小熊,我最喜欢的小熊了):
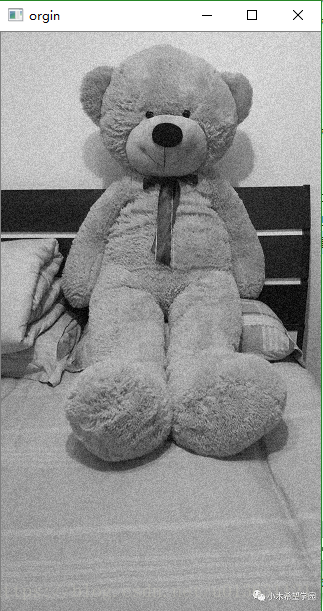
接下来运用代码,进行边缘检测,代码如下:
#导入类库
import cv2
import numpy as np
#读入图片
img = cv2.imread("D:/xiaomu/dawawazao.jpg", 0)
#显示图片
cv2.imshow('orgin',img)
#进行边缘检测,设定高低阈值分别为300,200。后把canny边缘图片保存到硬盘,名字为canny.jpe
cv2.imwrite("canny.jpg", cv2.Canny(img, 200, 300))
#显示边缘图片
cv2.imshow("canny", cv2.imread("canny.jpg"))
#按任意键退出
cv2.waitKey()
cv2.destroyAllWindows()
最后得到结果:

边缘检测本人就讲解完毕了,下节课讲解轮廓检测。
———————————————
如果对我的课程感兴趣的话,欢迎关注小木希望学园-微信公众号:
mutianwei521
也可以扫描二维码哦!
