函数原型:edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
第一个参数是待处理的原图像该函数会将图像处理成黑白,第二个参数是阈值1,第三个参数是阈值三
例如图像调整中的阈值就像一把尺子,它让高于这把尺子的像素值变得更高,低的变得更低,最后亮度高的全变白,低的全变
黑。(之前看到某哥们说的很好,引用分享)。
Canny边缘检测算法非常复杂,但也很有趣,它分5个步骤,即使用高斯滤波器对图像进行去噪,计算梯度,在边缘上
使用非最大抑制(NMS),在检测到的边缘上使用双(double)阈值去除假阳性(false positive),最后还会分析所有的边缘之间的联系,以保留真正的边缘消除不明显的边缘
例如
import cv2
img=cv2.imread('lbld.jpg')
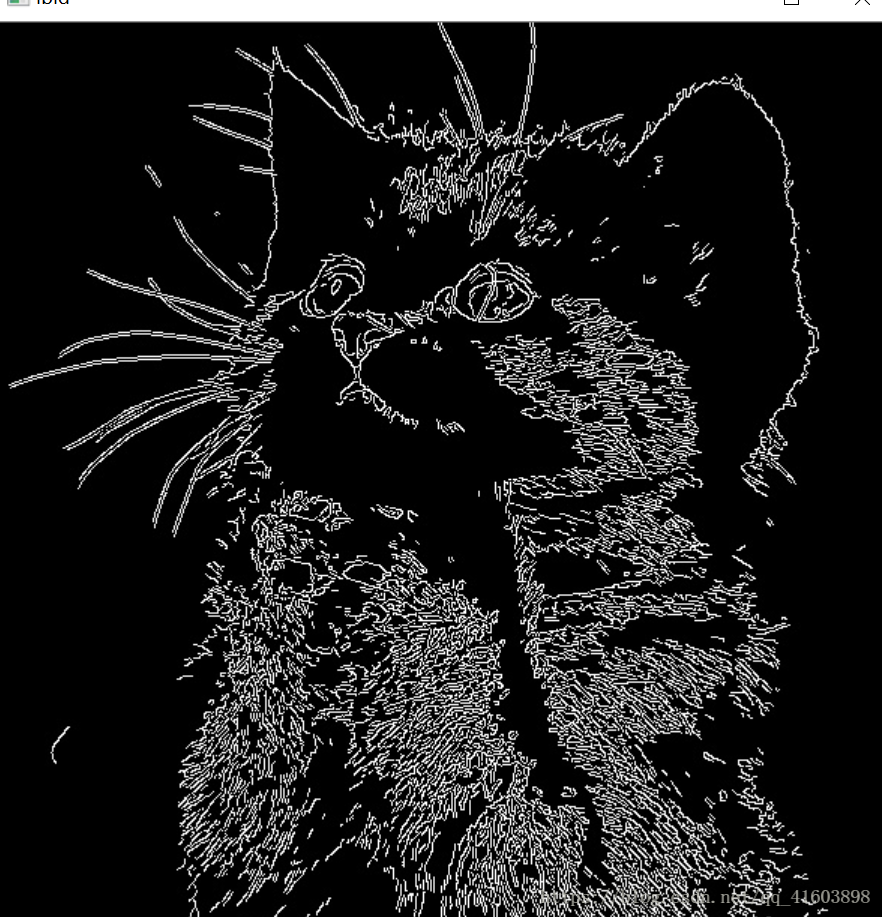
cv2.imwrite('lbld.jpg',cv2.Canny(img,200,300))
cv2.imshow('lbld',cv2.imread('lbld.jpg'))
cv2.waitKey()
处理前

处理后