一、API函数
int createTrackbar(const String& trackbarname,//活动条的名称
const String& winname,//namedWindow()创建窗口时的窗口名称
int* value,//和滑动条位置同步的变量
int count,//滑动条取值范围【0,count】
TrackbarCallback onChange = 0,//滑动条位置改变时调用这个回调函数
void* userdata = 0);//默认二、c++示例代码
//包含头文件
#include <opencv2/opencv.hpp>
//命名空间
using namespace cv;
using namespace std;
//全局变量声明
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 30;//滑动条当前位置
int max_thresh = 120;//滑动条取值范围【0,120】,阈值范围【130,250】
//全局函数声明部分
void callback_Harris(int, void*);//回调函数
//主函数
int main()
{
//【1】载入图像
g_srcImage = imread("G:\\opencvtest\\testImage\\house.jpg");
//【2】检查是否载入成功
if (g_srcImage.empty())
{
printf("读取图片错误,请确认目录下是否有imread函数指定图片存在! \n ");
return 0;
}
//【3】图像灰度化
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
//【4】创建窗口和滑动条
namedWindow("Harris角点检测", WINDOW_AUTOSIZE);
createTrackbar("阈值-130:", "Harris角点检测", &thresh, max_thresh, callback_Harris);
//【5】调用一次回调函数,进行初始化
callback_Harris(0, 0);
//【6】保持窗口显示
waitKey(0);
return 0;
}
void callback_Harris(int, void*)
{
//【1】将要显示的两张图置零,避免上一次画的圆圈累加进来
Mat dstImage = Mat::zeros(g_srcImage.size(), CV_32FC1);
g_srcImage1 = g_srcImage.clone();
//【2】角点检测
cornerHarris(g_grayImage, dstImage, 2, 3, 0.04);
//【3】归一化与转换8UC1
Mat normImage, scaledImage;
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, scaledImage);
//【4】绘制角点
for (int i = 0; i < normImage.rows; i++)
{
for (int j = 0; j < normImage.cols; j++)
{
if ((int)normImage.at<float>(i, j) > thresh+130)
{
circle(g_srcImage1, Point(j, i), 5, Scalar(0, 0, 255), 2);
circle(scaledImage, Point(j, i), 5, Scalar(0), 2);
}
}
}
//【4】显示图像
imshow("Harris角点检测", g_srcImage1);
imshow("示例25-Harris", scaledImage);
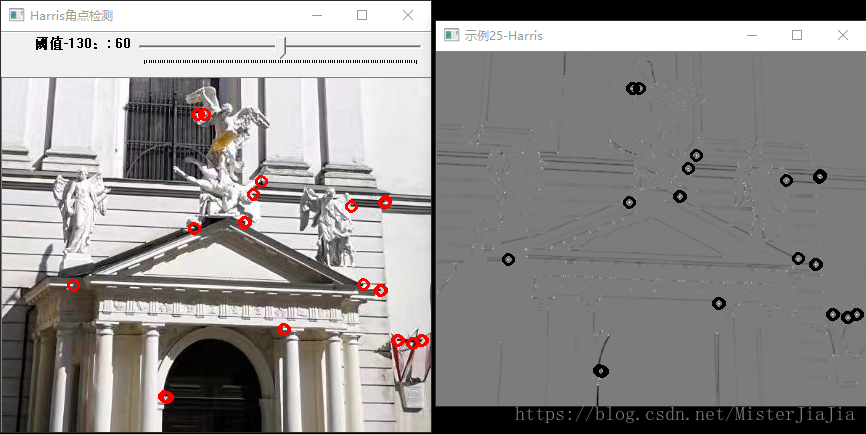
}三、运行截图
1.阈值180时
2.阈值150时
