随着智能网联交通的蓬勃发展,百度Apollo 9.0技术的引入为自动驾驶领域注入了新的活力。本文将深入剖析百度Apollo 9.0技术框架,并探讨如何将其成功移植到智慧交通沙盘自动驾驶小车平台上,实现了自动驾驶的算法。

1. 百度Apollo 9.0 技术框架解析
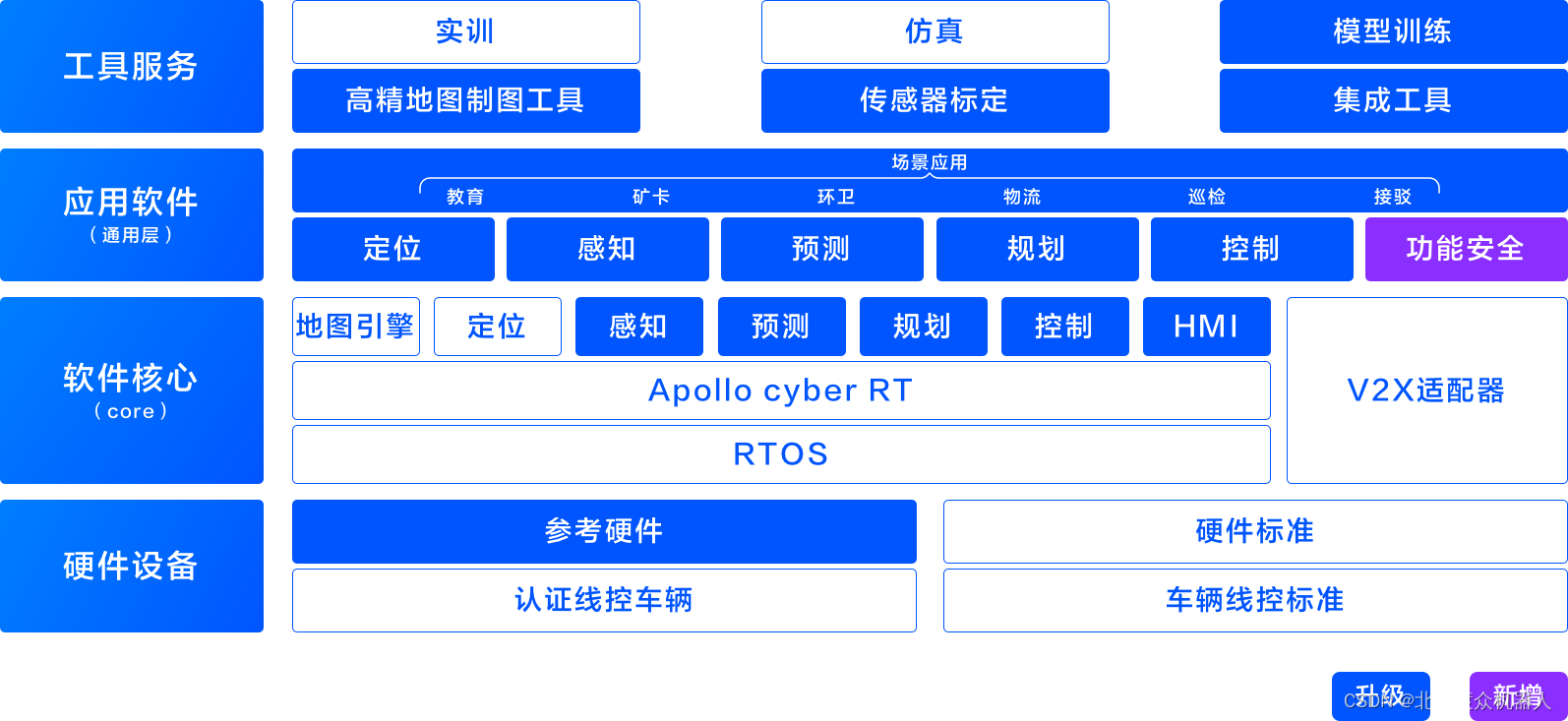
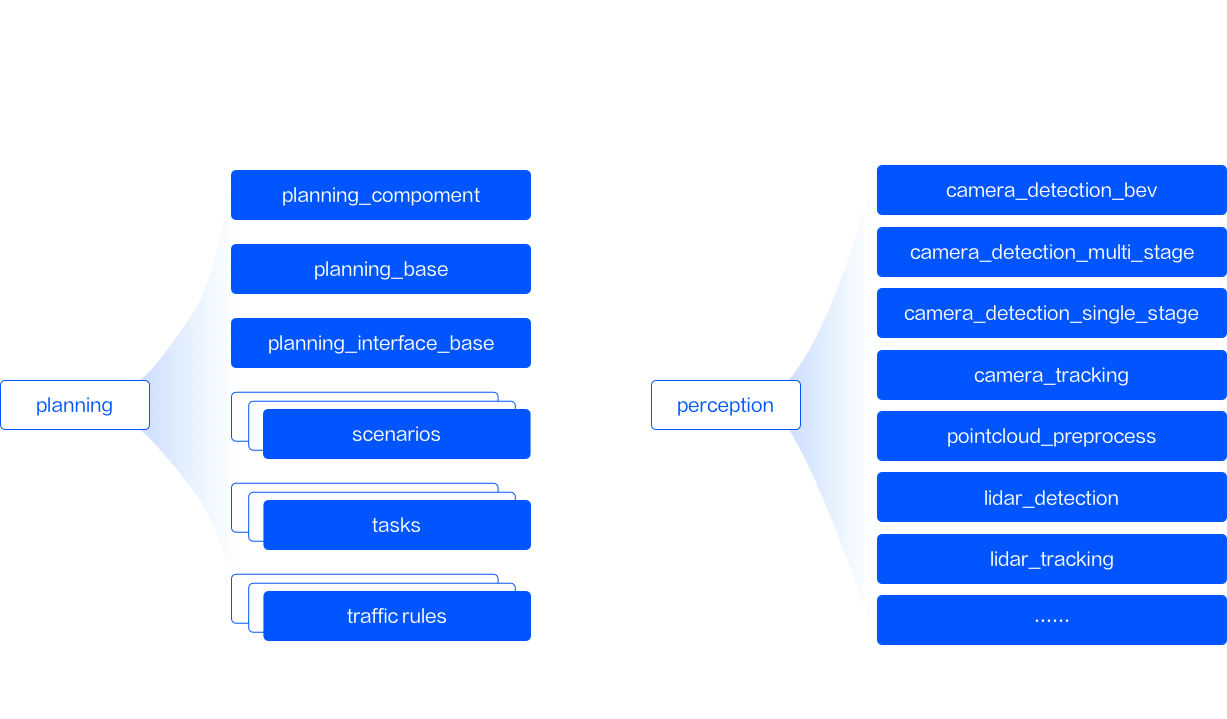
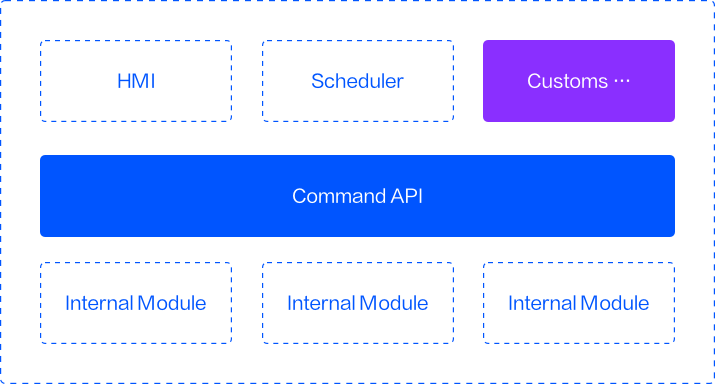
首先,我们将介绍百度Apollo 9.0的核心技术框架。该框架包括感知、规划、控制等多个模块,通过深度学习和传统算法相结合,实现了高效而精准的自动驾驶。
1.1 感知模块
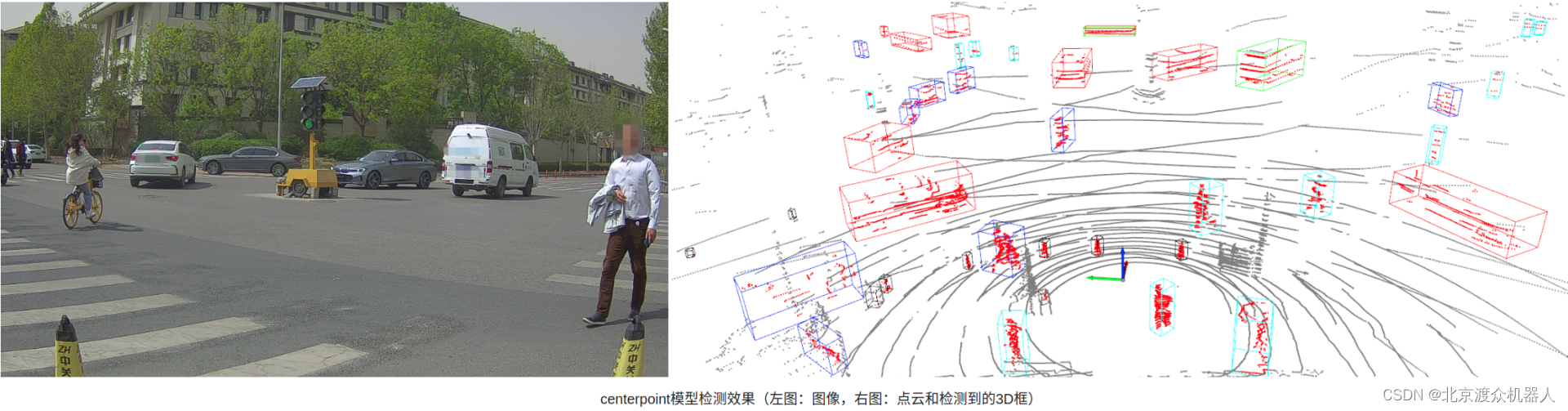
感知模块是自动驾驶的眼睛,其主要任务是从各类传感器获取数据并生成对车辆周围环境的理解。在Apollo 9.0中,深度学习技术在感知模块中得到了广泛应用。卷积神经网络(CNN)等深度学习算法被用于目标检测、语义分割等任务,使得感知模块能够高效而准确地识别道路、车辆和行人。
在沙盘小车中,由于计算资源受限,我们对感知模块进行了优化。我们将详细介绍这一模块的精简设计,以及在保证准确性的同时降低计算成本的策略。
1.2 规划模块
规划模块是路径规划的核心,决定了车辆应该如何从起点到终点行驶。在百度Apollo 9.0中,规划模块采用了先进的轨迹优化技术,结合了局部避障和全局路径规划,使得车辆能够灵活、高效地应对各种交通场景。
我们将深入剖析Apollo 9.0规划模块的工作原理,包括局部路径规划和全局路径规划的具体算法。这一部分将详细展示规划模块如何在复杂城市环境中确保车辆的安全和迅速到达目的地。
1.3 控制模块
控制模块是自动驾驶中最为关键的一环,负责根据规划好的路径和实时感知到的环境信息,调整车辆的速度、转向等控制信号。在Apollo 9.0中,控制模块综合运用了模型预测控制(MPC)等先进算法,以确保车辆能够平稳、精准地执行规划路径。
我们将详细介绍控制模块的工作原理,包括控制信号的生成、实时调整策略等方面。通过这一模块的深度解析,读者将对自动驾驶控制算法有更为全面的认识。
2. 移植与实现
2.1 Apollo 9.0 在沙盘小车的移植
在将百度Apollo 9.0技术框架移植到智慧交通沙盘自动驾驶小车上的过程中,我们面临着硬件适配、传感器数据融合等多方面的挑战。为了确保平稳移植和高效运行,我们对移植的每个步骤进行了详细的讨论和实现。

2.1.1. 硬件适配
沙盘小车的硬件与真实车辆存在差异,因此首要任务是对百度Apollo的硬件依赖进行适配。其中,我们主要关注以下几个方面:
2.1.1.1 传感器适配
沙盘小车上的激光雷达、摄像头等传感器数据格式可能与Apollo默认的格式不同。我们通过编写适配器,将传感器数据转换为Apollo能够识别和处理的格式。
// CyberRT Sensor Adapter
#include <cyber/cyber.h>
#include <cyber/time/time.h>
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/Image.h>
using apollo::cyber::Node;
using apollo::cyber::Time;
class SensorAdapter {
public:
SensorAdapter() {
// Initialize CyberRT node
node_ = apollo::cyber::CreateNode("sensor_adapter");
// Subscribe to LiDAR data
lidar_sub_ = node_->CreateReader<sensor_msgs::PointCloud2>(
"/sensor/lidar",
[this](const std::shared_ptr<sensor_msgs::PointCloud2>& msg) {
ProcessLidarData(msg);
});
// Subscribe to camera data
camera_sub_ = node_->CreateReader<sensor_msgs::Image>(
"/sensor/camera",
[this](const std::shared_ptr<sensor_msgs::Image>& msg) {
ProcessCameraData(msg);
});
}
private:
void ProcessLidarData(const std::shared_ptr<sensor_msgs::PointCloud2>& msg) {
// Lidar data processing logic
}
void ProcessCameraData(const std::shared_ptr<sensor_msgs::Image>& msg) {
// Camera data processing logic
}
private:
std::shared_ptr<Node> node_;
std::shared_ptr<apollo::cyber::Reader<sensor_msgs::PointCloud2>> lidar_sub_;
std::shared_ptr<apollo::cyber::Reader<sensor_msgs::Image>> camera_sub_;
};2.1.1.2 控制器适配
沙盘小车的底盘控制方式可能与Apollo默认的控制方式不同。我们通过实现自定义控制器,确保控制指令可以正确发送给小车。
// CyberRT Controller Adapter
#include <cyber/cyber.h>
#include <control_msgs/ControlCommand.h>
using apollo::cyber::Node;
using apollo::cyber::Time;
class ControllerAdapter {
public:
ControllerAdapter() {
// Initialize CyberRT node
node_ = apollo::cyber::CreateNode("controller_adapter");
// Subscribe to control command
control_sub_ = node_->CreateReader<control_msgs::ControlCommand>(
"/control/command",
[this](const std::shared_ptr<control_msgs::ControlCommand>& msg) {
ProcessControlCommand(msg);
});
}
private:
void ProcessControlCommand(const std::shared_ptr<control_msgs::ControlCommand>& msg) {
// Control command processing logic
}
private:
std::shared_ptr<Node> node_;
std::shared_ptr<apollo::cyber::Reader<control_msgs::ControlCommand>> control_sub_;
};2.2. 数据融合
在沙盘小车上,各个传感器产生的数据需要进行融合,以提供更准确的感知信息。这涉及到点云数据和图像数据的融合,确保规划和控制模块能够获取完整的环境信息。
2.2.1 数据融合算法
数据融合算法需要结合激光雷达和摄像头数据,实现对环境的全方位感知。以下是数据融合的简化代码:
// CyberRT Data Fusion
#include <cyber/cyber.h>
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/Image.h>
#include <fusion_msgs/FusedPointCloudImage.h>
using apollo::cyber::Node;
class DataFusion {
public:
DataFusion() {
// Initialize CyberRT node
node_ = apollo::cyber::CreateNode("data_fusion");
// Subscribe to LiDAR data
lidar_sub_ = node_->CreateReader<sensor_msgs::PointCloud2>(
"/sensor/lidar",
[this](const std::shared_ptr<sensor_msgs::PointCloud2>& lidar_msg) {
lidar_data_ = ProcessLidarData(lidar_msg);
FuseData();
});
// Subscribe to camera data
camera_sub_ = node_->CreateReader<sensor_msgs::Image>(
"/sensor/camera",
[this](const std::shared_ptr<sensor_msgs::Image>& camera_msg) {
camera_data_ = ProcessCameraData(camera_msg);
FuseData();
});
// Publish fused data
fused_data_pub_ = node_->CreateWriter<fusion_msgs::FusedPointCloudImage>("/fusion/data");
}
private:
// LiDAR data processing logic
LidarData ProcessLidarData(const std::shared_ptr<sensor_msgs::PointCloud2>& lidar_msg) {
// ...
}
// Camera data processing logic
CameraData ProcessCameraData(const std::shared_ptr<sensor_msgs::Image>& camera_msg) {
// ...
}
// Data fusion logic
void FuseData() {
if (lidar_data_ && camera_data_) {
// Fusion logic
fusion_msgs::FusedPointCloudImage fused_msg;
// Populate fused_msg with fused data
fused_data_pub_->Write(fused_msg);
}
}
private:
std::shared_ptr<Node> node_;
std::shared_ptr<apollo::cyber::Reader<sensor_msgs::PointCloud2>> lidar_sub_;
std::shared_ptr<apollo::cyber::Reader<sensor_msgs::Image>> camera_sub_;
std::shared_ptr<apollo::cyber::Writer<fusion_msgs::FusedPointCloudImage>> fused_data_pub_;
LidarData lidar_data_;
CameraData camera_data_;
};通过以上硬件适配和数据融合的工作,我们成功将百度Apollo 9.0技术框架移植到智慧交通沙盘自动驾驶小车上,实现了数据的准确感知和环境的全方位感知。接下来的章节将深入探讨路径规划和控制算法在这一移植基础上的实际应用。
3,路径规划与控制算法的实际应用
在智慧交通沙盘自动驾驶小车上,路径规划和控制算法是实现自主导航和避障的核心。在移植百度Apollo 9.0技术框架的基础上,我们对路径规划和控制模块进行了深度优化,以适应沙盘小车的特殊环境。
3.1. 路径规划
沙盘小车的路径规划需要考虑到沙盘环境的特殊性,包括微缩沙盘道路、微缩沙盘车辆等因素。我们在百度Apollo的基础上,进行了如下的路径规划模块优化。
3.1.1 环境建模
在智慧交通沙盘的自动驾驶小车项目中,环境建模是确保自动驾驶算法能够在实际微缩交通沙盘中准确运行的关键一步。与真实世界一样,我们需要对实际微缩沙盘中的道路、交叉口、交通标志和其他车辆进行高精度建模。
道路建模
为了使小车能够在微缩沙盘中精准导航,我们对道路进行了精确建模。这包括道路的几何形状、车道线的位置、车道宽度等信息。借助激光传感器和摄像头等传感器,我们对道路进行了高精度的三维点云扫描,确保模型的真实性和精确性。
// 道路建模代码示例
RoadModel BuildRoadModel(const PointCloud& road_points) {
RoadModel road_model;
// 道路几何形状建模
road_model.geometry = FitCurve(road_points);
// 提取车道线信息
road_model.lane_markings = ExtractLaneMarkings(road_points);
// 其他道路特征建模...
return road_model;
}交叉口建模
交叉口是微缩交通沙盘中复杂的部分之一。为了确保自动驾驶小车能够正确识别交叉口并采取相应的驾驶决策,我们进行了交叉口的建模。
// 交叉口建模代码示例
IntersectionModel BuildIntersectionModel(const PointCloud& intersection_points) {
IntersectionModel intersection_model;
// 交叉口几何形状建模
intersection_model.geometry = FitPolygon(intersection_points);
// 提取交叉口内部道路信息
intersection_model.roads = ExtractRoadsInIntersection(intersection_points);
// 其他交叉口特征建模...
return intersection_model;
}交通标志建模
交通标志对于自动驾驶小车的识别和决策至关重要。我们使用计算机视觉算法对微缩沙盘中的交通标志进行实时识别和建模。
// 交通标志建模代码示例
TrafficSignModel BuildTrafficSignModel(const CameraImage& image) {
TrafficSignModel traffic_sign_model;
// 使用计算机视觉算法识别交通标志
traffic_sign_model.sign_type = RecognizeTrafficSign(image);
// 获取交通标志位置信息
traffic_sign_model.position = LocateTrafficSign(image);
// 其他交通标志特征建模...
return traffic_sign_model;
}通过以上的建模工作,我们在微缩交通沙盘中创造了一个真实、高度还原的驾驶场景。这为自动驾驶小车的感知和决策提供了可靠的输入,使其能够在这个模拟环境中高效、准确地完成各种驾驶任务。
3.1.2 Lattice Planner
Lattice Planner是Apollo中一种基于格的路径规划算法,我们在这一算法的基础上进行了改进,以适应实际的沙盘环境。以下是代码示例:

// CyberRT Lattice Planner
#include <cyber/cyber.h>
#include <planning/lattice/lattice_planner.h>
using apollo::cyber::Node;
using apollo::cyber::Time;
class LatticePlanner {
public:
LatticePlanner() {
// Initialize CyberRT node
node_ = apollo::cyber::CreateNode("lattice_planner");
// Subscribe to high-precision map
map_sub_ = node_->CreateReader<planning::HDMap>(
"/map/hdmap",
[this](const std::shared_ptr<planning::HDMap>& map_msg) {
hd_map_ = ProcessMap(map_msg);
});
// Subscribe to localization data
localization_sub_ = node_->CreateReader<localization::LocalizationEstimate>(
"/localization/pose",
[this](const std::shared_ptr<localization::LocalizationEstimate>& pose_msg) {
current_pose_ = ProcessLocalization(pose_msg);
});
// Subscribe to planning request
planning_request_sub_ = node_->CreateReader<planning::PlanningRequest>(
"/planning/request",
[this](const std::shared_ptr<planning::PlanningRequest>& request_msg) {
ProcessPlanningRequest(request_msg);
});
// Publish planning result
planning_result_pub_ = node_->CreateWriter<planning::ADCTrajectory>("/planning/trajectory");
}
private:
HDMap ProcessMap(const std::shared_ptr<planning::HDMap>& map_msg) {
// HD map processing logic
return hd_map;
}
Pose ProcessLocalization(const std::shared_ptr<localization::LocalizationEstimate>& pose_msg) {
// Localization data processing logic
return current_pose;
}
void ProcessPlanningRequest(const std::shared_ptr<planning::PlanningRequest>& request_msg) {
// Planning request processing logic
planning::ADCTrajectory trajectory = LatticePlanningAlgorithm(hd_map, current_pose, request_msg);
planning_result_pub_->Write(trajectory);
}
private:
std::shared_ptr<Node> node_;
std::shared_ptr<apollo::cyber::Reader<planning::HDMap>> map_sub_;
std::shared_ptr<apollo::cyber::Reader<localization::LocalizationEstimate>> localization_sub_;
std::shared_ptr<apollo::cyber::Reader<planning::PlanningRequest>> planning_request_sub_;
std::shared_ptr<apollo::cyber::Writer<planning::ADCTrajectory>> planning_result_pub_;
HDMap hd_map_;
Pose current_pose_;
};3.2. 控制算法
在路径规划得到规划轨迹后,控制算法负责将小车按照规划轨迹稳定而高效地导航到目的地。针对智慧交通沙盘自动驾驶小车,我们优化了控制算法以适应微缩沙盘环境。
3.2.1 MPC 控制器
Model Predictive Control (MPC) 控制器简介
MPC(模型预测控制)是一种先进的控制策略,它通过在每个控制步骤上使用系统模型来优化未来的一系列控制输入。相比于传统的控制方法,MPC 能够更好地处理约束条件,并在非线性和多变量系统中表现出色。
MPC 控制器的基本原理
MPC 控制器的核心思想是通过对系统的动态模型进行建模,预测未来一段时间内的系统行为,并在每个控制步骤上计算最优的控制输入。这个最优化问题通常包含了对性能指标的最小化,比如车辆的偏移、速度偏差等。
MPC 的一般求解步骤如下:
-
系统建模: 建立描述系统动态行为的数学模型,这可以是线性或非线性模型。
-
预测: 基于当前状态和控制输入,使用系统模型预测未来一段时间内的系统状态。
-
性能指标定义: 定义一个性能指标,衡量系统行为的好坏,比如最小化车辆偏离轨迹的误差。
-
最优化问题求解: 将性能指标和系统约束条件纳入最优化问题中,通过求解这个问题得到最优的控制输入。
-
执行: 应用计算得到的最优控制输入,将系统引导到预测的轨迹上。
MPC 在自动驾驶中的应用
在自动驾驶系统中,MPC 被广泛应用于路径规划和车辆控制。通过结合高精度地图信息、感知数据和规划目标,MPC 控制器可以实现高效、平滑的车辆运动。我们使用了Apollo中的MPC控制器,并进行了适应性调整。以下是简化的代码示例:
// CyberRT MPC Controller
#include <cyber/cyber.h>
#include <control/mpc_controller.h>
using apollo::cyber::Node;
class MPCController {
public:
MPCController() {
// Initialize CyberRT node
node_ = apollo::cyber::CreateNode("mpc_controller");
// Subscribe to planning result
planning_result_sub_ = node_->CreateReader<planning::ADCTrajectory>(
"/planning/trajectory",
[this](const std::shared_ptr<planning::ADCTrajectory>& trajectory_msg) {
current_trajectory_ = ProcessTrajectory(trajectory_msg);
});
// Subscribe to vehicle state
vehicle_state_sub_ = node_->CreateReader<canbus::Chassis>(
"/canbus/chassis",
[this](const std::shared_ptr<canbus::Chassis>& chassis_msg) {
current_vehicle_state_ = ProcessChassis(chassis_msg);
});
// Publish control command
control_command_pub_ = node_->CreateWriter<control::ControlCommand>("/control/command");
}
private:
Trajectory ProcessTrajectory(const std::shared_ptr<planning::ADCTrajectory>& trajectory_msg) {
// Trajectory processing logic
return current_trajectory;
}
VehicleState ProcessChassis(const std::shared_ptr<canbus::Chassis>& chassis_msg) {
// Vehicle state processing logic
return current_vehicle_state;
}
void ControlLoop() {
// MPC control loop
control::ControlCommand command = MPCControlAlgorithm(current_trajectory, current_vehicle_state);
control_command_pub_->Write(command);
}
private:
std::shared_ptr<Node> node_;
std::shared_ptr<apollo::cyber::Reader<planning::ADCTrajectory>> planning_result_sub_;
std::shared_ptr<apollo::cyber::Reader<canbus::Chassis>> vehicle_state_sub_;
std::shared_ptr<apollo::cyber::Writer<control::ControlCommand>> control_command_pub_;
Trajectory current_trajectory_;
VehicleState current_vehicle_state_;
};通过以上的路径规划和控制算法的优化,我们在智慧交通沙盘自动驾驶小车上实现了更加准确、高效的导航和行驶控制。这一系统不仅在微缩沙盘环境中能够完成多样化的场景驾驶,也为实际自动驾驶汽车的开发和测试提供了有力的支持。
4. 教学与实践
智能网联智慧交通自动驾驶沙盘在高职和高校的教学与实践
概述
智能网联自动驾驶沙盘系统作为一种先进的教学工具,致力于为高职和高校的汽车专业、交通工程专业、人工智能专业等多个领域的学生提供全面、实践性的教学体验。结合沙盘中的自动驾驶小车,学生能够深入了解和掌握自动驾驶系统的核心技术,同时通过实际的操作,将理论知识转化为实际应用。
沙盘系统特色
-
全面覆盖多个专业领域: 针对汽车专业、交通工程专业、人工智能专业等多个专业领域,沙盘系统提供了全面而深入的教学内容,满足不同专业学生的需求。
-
开源代码支持二次开发: 沙盘中的小车系统采用开源代码,为学生提供了丰富的学术研究和二次开发的机会。学生可以通过自主的开发和适配,深入了解系统底层原理。
-
分布式程序架构: 沙盘系统采用分布式程序架构,使得多个小车能够协同工作,增加了系统的可扩展性。这也为学生的团队协作和系统集成提供了实际操作平台。
教学应用场景
1. 汽车专业
在汽车专业中,沙盘系统可以用于以下方面的教学:
-
汽车电子系统: 学生可以学习汽车电子控制单元(ECU)的设计和调试,以及与自动驾驶相关的传感器和执行器的应用。
-
车辆动力学: 通过模拟车辆在各种驾驶情景下的动力学行为,学生能够深入理解车辆的操控特性。
2. 交通工程专业
沙盘系统在交通工程专业中的应用包括:
-
智能交通管理: 学生可以通过沙盘模拟交通流,设计并测试智能交通管理算法,提高道路通行效率。
-
交通规划: 使用沙盘系统可以模拟不同交通规划方案的实施效果,帮助学生理解城市交通规划的复杂性。
3. 人工智能专业
对于人工智能专业,沙盘系统有如下应用:
-
机器学习与感知: 学生能够了解激光雷达、摄像头等传感器的原理,并通过机器学习算法进行目标检测与跟踪。
-
路径规划与决策: 沙盘中的自动驾驶小车提供了实际的路径规划和决策场景,帮助学生深入理解人工智能在自动驾驶中的关键作用。
4. 其他专业
沙盘系统还适用于其他专业领域:
-
智能制造专业: 学生可以学习智能制造中的自动化控制和协同作业原理。
-
计算机专业: 沙盘系统提供了丰富的计算机视觉、感知和控制系统应用场景,适用于计算机专业的学生。
实践操作与科研项目
学生可以通过以下方式参与实践和科研项目:
-
系统逆向工程: 学生可以深入研究沙盘系统的源代码,进行逆向工程,了解其中各个模块的实现原理。
-
新算法应用: 针对自动驾驶场景,学生可以尝试应用新的路径规划、感知或决策算法,通过实验验证其性能。
-
团队合作项目: 学生可以组成团队,进行自主设计的实践项目,包括系统集成、算法优化等方面。
结语
智能网联智慧交通自动驾驶沙盘系统以其开放性、实践性和跨学科性质,为高职和高校的教学和科研提供了独特的平台。通过沙盘中的自动驾驶小车,学生能够接触到最前沿的自动驾驶技术,提高综合素养,为未来智慧交通领域的发展培养更多的专业人才。