在繁忙的都市生活中,我们时常对未来的科技发展充满了好奇和期待。而近日,我有幸参加了一场引领科技潮流的线下技术沙龙,主题便是探索自动驾驶的魅力——一个让我们身临其境感受创新、了解技术巨擘的机会。
在12月2日我有幸参加了Apollo新版本Beta自动驾驶技术沙龙,此次推出的全新Beta版本更是引发了无数开发者的兴奋。我惊讶于Apollo在工程框架、感知算法、规划控制等方面的巨大升级和优化。这不仅是对自动驾驶技术的巅峰呈现,更是对未来道路上的创新探索。让我们跟随本次技术沙龙一起来感受一下Apollo的魅力吧!

Apollo新版本Beta自动驾驶技术沙龙
时间:12月2日(周六) 14:00-18:00
地点:北京·首钢园·Apollo Park
一.Apollo
apollo是百度的自动驾驶开源框架。2017年4月19日,百度又一次展示了自动驾驶领域领导者的大气风范,发布了一项名为“Apollo(阿波罗)”的新计划,向汽车行业及自动驾驶领域的合作伙伴提供一个开放、完整、安全的软件平台,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。
Apollo计划是百度在自动驾驶领域推出的开放平台,旨在为汽车行业和自动驾驶领域的合作伙伴提供一套完整、安全、开放的软件系统,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。
Apollo计划的推出,得到了全球汽车制造商、出行服务商、科技公司和研究机构的积极响应和支持,其中包括宝马、福特、戴姆勒、大众、拜腾汽车等众多知名企业。这些企业成为了Apollo合作伙伴,共同推动自动驾驶技术的发展和应用。

1.1Apollo车型进化史
百度在自动驾驶领域不断推出新的技术和车型,随着技术的不断发展和创新,百度在自动驾驶领域不断推出新的车型和进化史,展示了其在自动驾驶技术方面的领先地位和未来愿景。
- 初代“小红”
2013年百度开启自动驾驶测试计划,为验证自动驾驶底盘控制与高精度定位导航与感知的测试方面的技术能力,百度深度学习实验室与北理工合作共同研发了绰号“小红”的全地形越野车,是百度的技术验证性产品。
- 第一代:宝马
2013年,百度和德国宝马合作研发了第一代自动驾驶车型,技术研发到产出花了大概两年时间。这代车型,是(国内)第一款能够驶上公开道路的车型,曾在北京五环道路上行驶。
- 第二代:奇瑞EQ&比亚迪&北汽
2015年底启动合作,2016年初开始上路测试。2016年11月,奇瑞EQ比亚迪EV300、北汽EU260共同参加了在乌镇举办的世界互联网大会,18辆无人车组成的车队接待了超过300人次嘉宾试乘,是百度最早亮相于公众面前的自动驾驶车型,也是中国第一次无人驾驶车队试运营
- 第三代、第四代、第五代等等一直到现在的第六代Apollo RT6。
Apollo RT6是百度第六代量产无人车,于2022年7月21日在百度世界大会上发布。这款车采用了贯穿一体的空间飞梭车身及银河腰线,创新性的龙骨天窗,将车顶传感器与天窗结构高度集成融为一体。为了进一步提升出行便利性,车辆还配置了具有识别和提示功能的灵犀交互灯语、智能电动侧滑门等人性化功能。Apollo RT6具备城市复杂道路的无人驾驶能力,根据规划,Apollo RT6会于2023年率先在萝卜快跑上投入使用。

1.2 Apollo新版本Beta整体介绍
会议的14:30开始,就到了本次沙龙的Apollo新版本Beta整体介绍内容。
自2017年发布以来,Apollo开放平台已迭代了12个版本,今天我们带来了全新的Beta版本在Beta中,我们从在工程框架、算法和工具三个方向实现了全面升级,使得Apollo在功能上更丰富更强大,整体操作上也更灵活更易用,极大提升开发效率的同时,可帮助更多开发者快速搭建属于自己的自动驾驶系统。
Apollo新版本Beta是百度自动驾驶开放平台Apollo的最新升级版本,旨在为自动驾驶开发人员提供统一的开发工具入口和易扩展的PnC、感知软件框架。新版本Beta聚焦于开发者扩展开发与调试体验,基于包管理重塑了PnC、感知扩展开发模式,并推出了全新的开发者工具入口Dreamview+。
Apollo新版本Beta在感知算法上也有重大升级,采用了新的激光雷达检测模型CenterPoint,使用百度百万级数据进行训练,检测精度和召回率远超原CNNSeg模型,可以提供复杂城市道路场景下实时、准确、稳定的3D目标检测效果。此外,新版本Beta还支持增量训练,支持独立自主进行模型训练。
除了感知算法升级,Apollo新版本Beta还在LiDAR、Camera、Radar感知模型上进行了全面升级,采用了更强大的3D目标检测模型Yolo X和Yolo 3D,检测效果和泛化性都得到了巨大提升。同时,新版本Beta还增加了对4D毫米波的支持,障碍物检测和天气适应性都得到了极大增强。

Apollo新版本Beta还推出了Dreamview+开发者工具入口,引入模式让多场景使用更便捷,引入面板布局让开发者随心自定义可视化,引入资源中心提供更丰富开发数据资源。这些功能为开发者提供了更加高效、便捷的开发体验。
Apollo新版本Beta在开发工具、感知算法、数据资源等方面进行了全面升级,为自动驾驶开发人员提供了更加完善、易用的平台支持。

二.Apollo新版本Beta工具技术分享
在本次沙龙的15:50 左右开始了本次沙龙的Apollo新版本Beta工具技术分享,这也是我最感兴趣的内容,本次着重介绍一下Apollo新版本Beta工具方向的内容。
Apollo新版本Beta升级了感知框架与开发流程,引入了3个基于深度学习的模型,丰富了感知模型类型,并有效提升了精度。同时开放了感知的全流程开发环节,从模型的训练、部署到验证各个环节,开发者除了能选择平台自带的模型之外,更能基于自己的需求扩展更多模型。经过本次沙龙演讲人的认真讲解,和会后的仔细学习,我认真总结了工具技术分享的相关内容。
2.1 Dreamview+ 新特性
Dreamview+的新版本在多个方面进行了全面提升:
1. 基于模式的多场景:通过将感知、PnC等具体开发场景作为模式分类,简化各类模式下的操作步骤,优化使用流程,提高开发效率。
2. 基于面板的布局:支持自由配置可视化面板的布局、各面板内容以及大小,使开发者能够创建符合自身工作流的操作界面,增加灵活性。
3. 集成云端资源中心:引入云端资源中心,使数据资源集中管理,便于快速获取。与Studio云端资源互动更加强化,开发者可一键下载各类资源进行算法测试,包括地图、场景、车辆配置和数据包等,进一步丰富开发者资源库。
4. 新人引导与中英切换:通过可视化引导协助新开发者快速学习操作流程和步骤,降低学习和探索成本。全面支持中英文切换,降低专业术语理解难度,满足国内外开发者的需求。
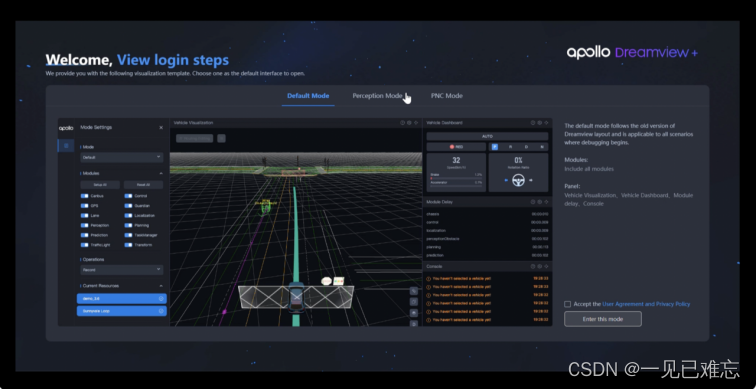
全新Dreamview+从感知、PnC等不同业务研发场景出发,根据不同场景的操作方式与开发流程,设计了默认模式、感知模式、PnC模式三种场景模式,开发者可以在三种模式之间随意切换,选择适应自身需求的模式进行自动驾驶开发,增强了场景针对性,同时极大提升了开发效率。
全新Dreamview+中,开发者可以自由地定义内容和布局,以适应不同的使用习惯和需求。开发者既可以通过拖拽的方式添加面板、一键复制和删除面板,也可以自由设置面板的数量及位置,以及修改面板布局。这些功能使得可视化区域更加灵活和可定制化,数据可视化和数据分析更加高效。

PnC开发: 场景便捷同步、数据区域清晰
场景便捷同步指的是,Apollo新版本Beta提供了云端和本地的场景管理功能,开发者可以在云端或本地创建、编辑和保存场景,并方便地将场景同步到其他设备或车辆上,以便进行测试和验证。这种同步功能可以大大提高开发效率,减少重复性工作。
数据区域清晰则是指,Apollo新版本Beta在数据可视化方面进行了改进,使得开发者能够更加清晰地看到数据区域的变化和趋势。例如,在实时仿真或实际测试过程中,开发者可以清晰地看到车辆的行驶轨迹、传感器数据等信息,以便更好地理解车辆的行为和决策过程。这种清晰的数据可视化可以帮助开发者更好地进行算法开发和调试。

在8.0版本基础上,全新Dreamview+整合了本地和云端资源,带来了全新的资源中心。资源中心的资源类型包括地图、场景、车辆等各类资源,通过资源中心,开发者可以更好地管理和调试资源,从而提高开发效率和系统性能。
在全新Dreamview+中,开发者可以使用资源中心的同步功能,将Apollo Studio云端工作台中的数据同步到本地,包括地图、场景、车辆配置、数据包等资源,避免了手动上传和下载资源的麻烦。同时,Dreamview+资源中心还可以实时同步各类资源的更新状态,以便开发人员快速地进行算法的迭代测试和调试。

Dreamview+的一些新特性包括:
- 基于模式的多场景使用:Dreamview+以具体开发场景如感知、PnC等作为模式分类,精简了各类模式下的操作步骤,优化了使用流程,提升了开发效率。
- 基于面板的自由布局:Dreamview+支持自由配置可视化面板的布局,开发者可以根据自己的工作流创建符合自身需求的操作界面。
- 集成云端资源中心:Dreamview+集成了云端资源中心,数据资源集中,可便捷管理和迅速取用。同时进一步加强了与 Studio 云端资源的互动,可以一键下载各类资源用于算法测试,包括地图、场景、车辆配置、数据包等,进一步丰富了开发者的资源库。
总体来说,Dreamview+新版本全面提升了多场景使用、自由布局、数据资源、语言支持四个方面的体验,为开发者提供了更高效、更灵活的开发工具。

2.2 自由交流/茶歇
在自由交流/茶歇时间,我与其他开发者热烈讨论了Apollo新版本Beta的技术升级,分享了项目经验,探讨了未来技术趋势,促成了实际应用心得的交流,同时拓展了人脉网络。

在技术沙龙期间,主办方贴心地为我们准备了美味可口的水果甜点等,为参与者的体验增添了愉悦的一笔。

2.3 沙龙参会心得
参加了Apollo新版本Beta自动驾驶技术沙龙,深感科技的前沿魅力,本次沙龙收获很大。
- 通过参与,我深刻体会到自动驾驶技术的巅峰表现以及对未来交通和出行方式的潜在影响。这不仅是一次学习,更是一场身临其境感受创新的机会。
- 对于Apollo新版本Beta的介绍让我印象深刻。全新的工程框架、感知算法、规划控制等方面的升级和优化展示了百度在自动驾驶技术上的不懈努力。特别是感知算法的重大升级,采用了新的激光雷达检测模型CenterPoint,以及在LiDAR、Camera、Radar感知模型上的全面升级,给我留下了深刻的印象。这种技术的不断演进使得自动驾驶系统在复杂城市道路场景下能够实现更为准确、稳定的3D目标检测效果。
- 此外,新版本Beta推出的Dreamview+开发者工具入口也给我带来了新的认知。基于模式的多场景使用、基于面板的自由布局以及集成云端资源中心等新特性,为开发者提供了更高效、更灵活的开发工具。这种开发者友好的设计使得自动驾驶系统的开发变得更加直观、便捷。
总的来说,参加这次技术沙龙让我对自动驾驶技术有了更深入的了解,并对未来的科技发展充满了信心。这样的活动不仅是知识的更新,更是与科技前沿保持连接的重要途径。期待未来能够见证更多创新的涌现,为我们的出行方式带来更多可能性。
