前言
满分视频实例:百度Apollo星火自动驾驶—慢速车绕行_哔哩哔哩_bilibili
扫描二维码关注公众号,回复:
16030098 查看本文章

提示:以下是本篇文章正文内容,下面案例可供参考
一、题目分析

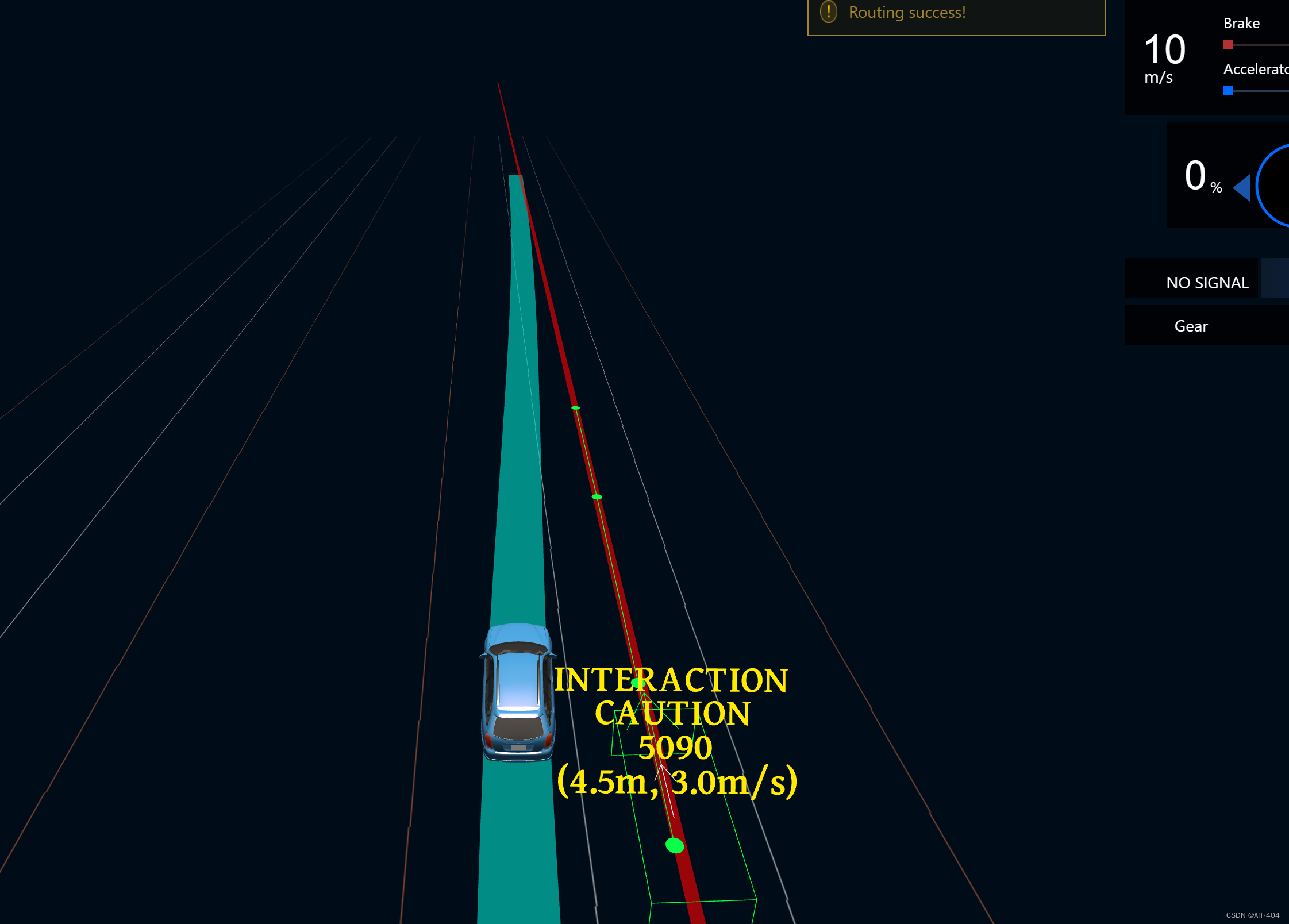
本题要点其实也是两个:1是当慢速车速度小于等于3m/时进行绕行决策 2是向左绕行
二、步骤分析
1.绕行决策

通过对绕行决策的分析可以知道要做出绕行决策的一个关键是 为静态障碍物,因此可以通过调整静态障碍物的速度阈值来实现绕行决策。
2.绕行方向
绕行的方向可以从路径评估入手
总结
提示:很多小伙伴问的最多的问题就是绕行时有做出绕行决策但一直跟车
这其实和上次提到的路径规划有关,主要是因为慢速车不是真的是静止的,这就可能导致规划的路径与慢速车会有碰撞