目录
一、简介
定位指令用于控制伺服电机或步进电机的位置移动。可以通过改变脉冲频率和脉冲数量来控制电机的移动速度和移动距离,同时还可以指定移动的方向。
二、指令形式
1、相对定位[DRVI、DDRVI]
[DRVI S1 S2 Dn1 Dn2]
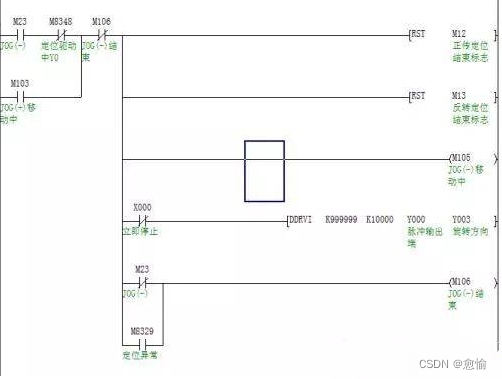
S1 输出脉冲量(位置移动距离),1~32767 PLS。
S2 输出脉冲频率(位置移动速度),1~32767 HZ。
Dn1 输出脉冲端口,Y0、Y1、Y2。
Dn2 指定旋转方向的输出端口(位置移动方向), ON:正转,OFF:反转。

运动过程:(指令指定小车向左运行)
指令:[DRVI k5000 k2000 Y0 Y3]
使用相对定位指令—>从小车位置算起,运行5000个脉冲数。
2、绝对定位[DRVA、DDRVA]
[DRVA S1 S2 Dn1 Dn2]
S1 输出脉冲量(位置移动距离),1~32767 PLS。
S2 输出脉冲频率(位置移动速度),1~32767 HZ。
Dn1 输出脉冲端口,Y0、Y1、Y2。
Dn2 指定旋转方向的输出端口(位置移动方向), ON:正转,OFF:反转。

运动过程:(指令指定小车向左运行)
指令:[DRVA k5000 k2000 Y0 Y3]
使用绝对定位指令—>从机械原点算起,运行5000个脉冲数
解析:对于不同指令,主要看参考点是小车本身还是原点,例如绝对指令是不管小车位置在哪,使用绝对指令后小车就要到达距原点+5000个脉冲的位置(即如果小车本来就在距离原点+5000个脉冲的位置,这时小车不动)。
三、总结
1、S1的值与电机转动方向也相关,当S1正值则电机按设定方向转动;当S1负值则电机为设定方向反向运行。
2、DDRVA 、DDRVA是32位操作,即脉冲量和脉冲频率都可以达到21亿。
3、绝对定位的参考物是以原点信号为计算起点,小车运动到距原点S1的距离;相对定位的参考物是以运动物体自身为计算起点,运动S1的距离。