介绍
Gazebo是ROS系统中最为常用的三维物理仿真平台,支持动力学引擎,可以实现高质量的图形渲染,不仅可以模拟机器人及周边环境,还可以加入摩擦力、弹性系数等物理属性。
比如我们要开发一个火星车,那就可以在Gazebo中模拟火星表面的环境,再比如我们做无人机,续航和限飞都导致我们没有办法频繁用实物做实验,此时不妨使用Gazebo先做仿真,等算法开发的差不多了,再部署到实物上来运行。
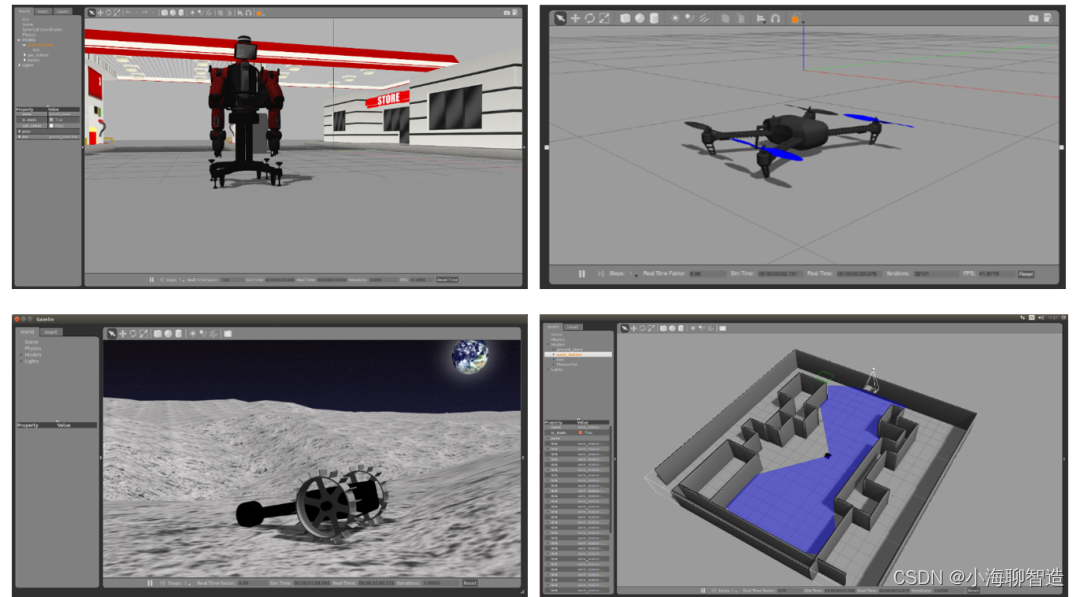
所以类似Gazebo这样的仿真平台,可以帮助我们验证机器人算法、优化机器人设计、测试机器人场景应用,为机器人开发提供更多可能。
Gazebo如何使用呢?我们不妨先把它给跑起来,互相认识一下。
为了确保系统中已经完整安装了Gazebo相关的功能包,大家可以通过这样一个命令,简单直接的把和gazebo相关的包都给装上:
安装:
sudo apt install ros-humble-gazebo-*
运行
通过这句命令就可以启动啦:
ros2 launch gazebo_ros gazebo.launch.py
- Gazebo的world介绍
world即世界,gazebo的world文件就是用于描述世界模型的,也就是环境模型。
Gazebo已经为我们准备了很多常用的物体模型,除了基础的圆球,圆柱,立方体外的,其实还有飞机、汽车、房子等你现实中无法拥有的。
但是一开始安装Gazebo的时候并不会帮你下载好这些模型,需要我们手动下载,打开终端,复制粘贴下面这句
cd ~/.gazebo && wget https://gitee.com/ohhuo/scripts/raw/master/gazebo_model.py && python3 gazebo_model.py
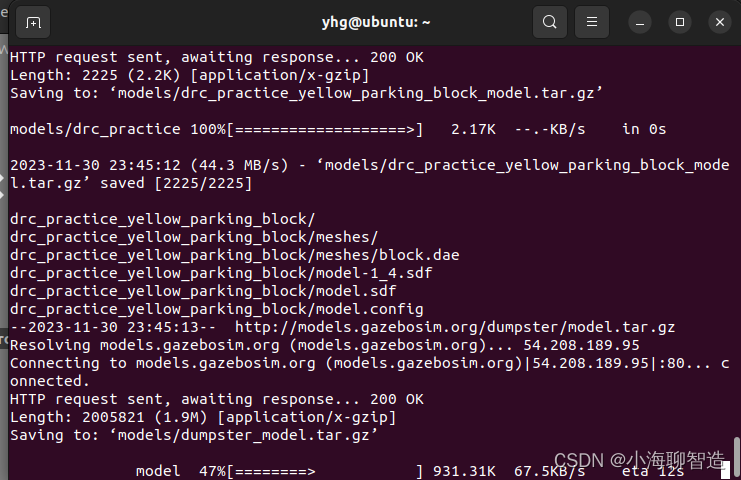
因为模型数量比较多,所以需要多导一会
然后等待脚本运行完成,一共有281个模型,逐一下载并解压到~/.gazebo/models/目录。
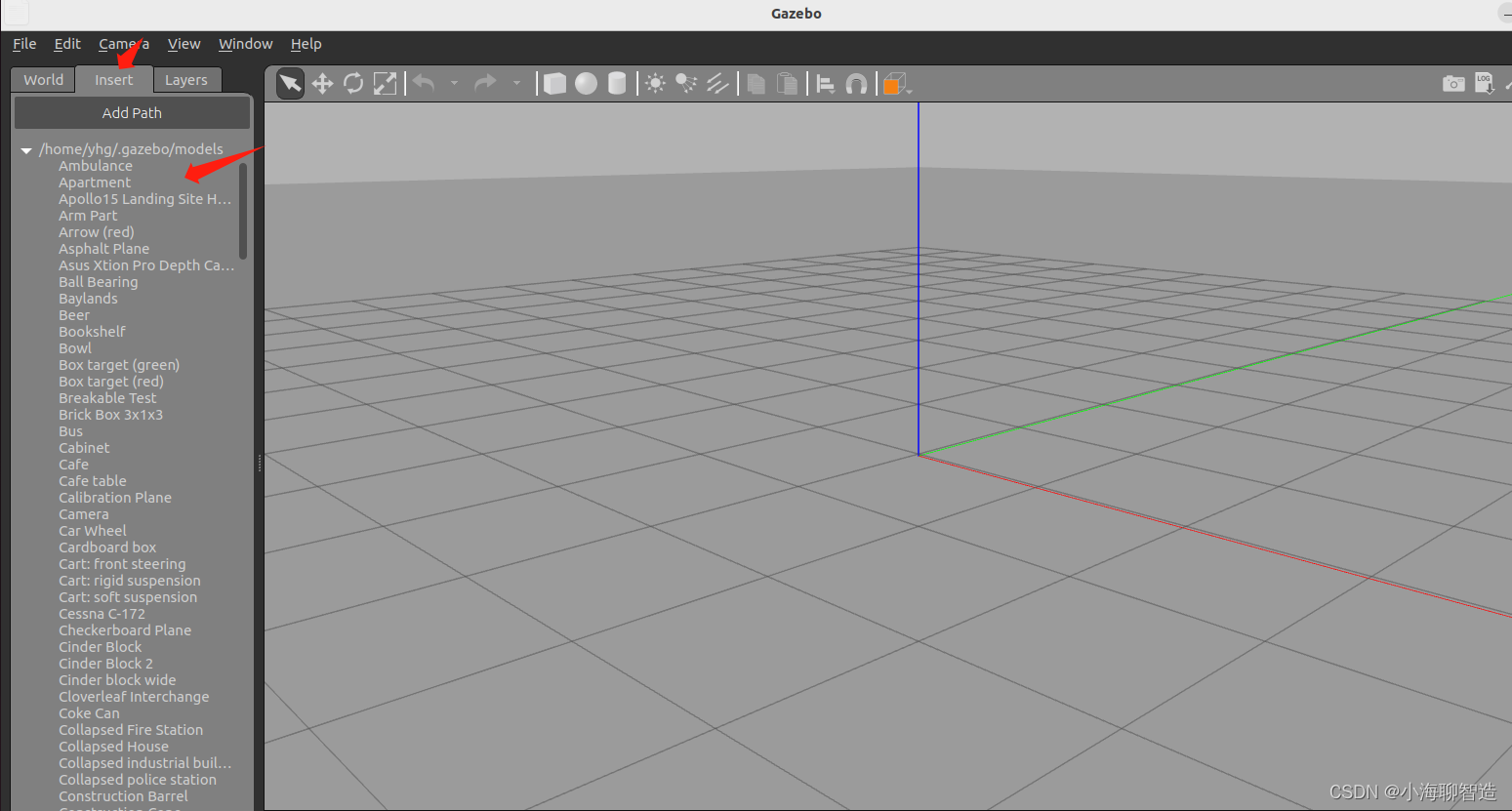
此时再次打开终端,输入gazebo,把选项卡切换到Insert
关掉重新打开就可以看到很多的模型就已经导入进去了
由于我的虚拟机配置比较低,演示不了模型的操作,有兴趣的同学自己玩玩