本文讲解导向滤波的算法与实现;
导向滤波是何凯明在2010年提出的一种滤波器,论文名称Guided Image filter,算法如下所示:
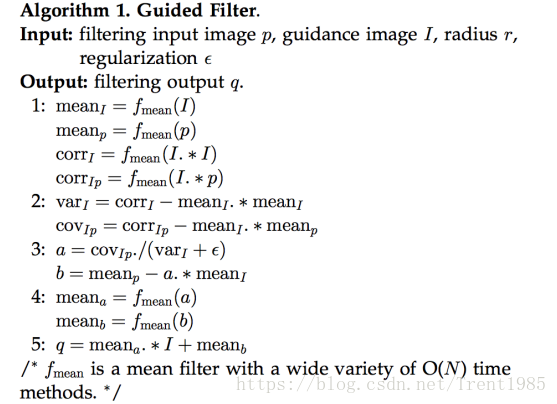
整体而言是基于均值和方差的一种保边滤波器,效果如下图所示:

代码实现如下:
int GuidedFilter(unsigned char* srcData, int width ,int height, int radius, float delta)
{
float *data = (float*)malloc(sizeof(float) * width * height);
float *meanIP = (float*)malloc(sizeof(float) * width * height);
float *corrIP = (float*)malloc(sizeof(float) * width * height);
float *varIP = (float*)malloc(sizeof(float) * width * height);
float *a = (float*)malloc(sizeof(float) * width * height);
float *b = (float*)malloc(sizeof(float) * width * height);
for(int i = 0; i < width * height; i++)
{
data[i] = (float)srcData[i] / 255.0;
}
//mean and cov compute
MeanCovMapCalculate(data, width, height, meanIP, radius);
for(int i = 0; i < width * height; i++)
{
data[i] *= data[i];
}
//mean and cov compute
MeanCovMapCalculate(data, width, height, corrIP, radius);
for(int i = 0; i < width * height; i++)
{
varIP[i] = corrIP[i] - meanIP[i] * meanIP[i];
}
for(int i = 0; i < width * height; i++)
{
a[i] = varIP[i] / (varIP[i] + delta);
b[i] = meanIP[i] - a[i] * meanIP[i];
}
//mean and cov compute
MeanCovMapCalculate(a, width, height, meanIP, radius);
MeanCovMapCalculate(b, width, height, corrIP, radius);
for(int i = 0; i < width * height; i++)
{
srcData[i] = (unsigned char)(CLIP3((meanIP[i] * srcData[i]/255.0f + corrIP[i])*255.0f, 0, 255));
}
free(data);
free(meanIP);
free(corrIP);
free(varIP);
free(a);
free(b);
return 0;
};
void f_GuidedFilter(unsigned char* srcData, int nWidth, int nHeight, int nStride, int radius, float delta)
{
if (srcData == NULL)
{
return;
}
unsigned char* rData = (unsigned char*)malloc(sizeof(unsigned char) * nWidth * nHeight);
unsigned char* gData = (unsigned char*)malloc(sizeof(unsigned char) * nWidth * nHeight);
unsigned char* bData = (unsigned char*)malloc(sizeof(unsigned char) * nWidth * nHeight);
unsigned char* pSrc = srcData;
int Y, CB, CR;
unsigned char* pR = rData;
unsigned char* pG = gData;
unsigned char* pB = bData;
for(int j = 0; j < nHeight; j++)
{
for(int i = 0; i < nWidth; i++)
{
*pR = pSrc[2];
*pG = pSrc[1];
*pB = pSrc[0];
pR++;
pG++;
pB++;
pSrc += 4;
}
}
#pragma omp parallel sections num_threads(omp_get_num_procs())
{
#pragma omp section
GuidedFilter(rData, nWidth, nHeight, radius, delta);
#pragma omp section
GuidedFilter(gData, nWidth, nHeight, radius, delta);
#pragma omp section
GuidedFilter(bData, nWidth, nHeight, radius, delta);
}
pSrc = srcData;
pR = rData;
pG = gData;
pB = bData;
int R, G, B;
for(int j = 0; j < nHeight; j++)
{
for(int i = 0; i < nWidth; i++)
{
pSrc[0] = *pB;
pSrc[1] = *pG;
pSrc[2] = *pR;
pR++;
pG++;
pB++;
pSrc += 4;
}
}
free(rData);
free(gData);
free(bData);
}
void f_GuidedFilterOneChannel(unsigned char* srcData, int nWidth, int nHeight, int nStride, int radius, float delta)
{
if (srcData == NULL)
{
return;
}
unsigned char* yData = (unsigned char*)malloc(sizeof(unsigned char) * nWidth * nHeight);
unsigned char* cbData = (unsigned char*)malloc(sizeof(unsigned char) * nWidth * nHeight);
unsigned char* crData = (unsigned char*)malloc(sizeof(unsigned char) * nWidth * nHeight);
unsigned char* pSrc = srcData;
int Y, CB, CR;
unsigned char* pY = yData;
unsigned char* pCb = cbData;
unsigned char* pCr = crData;
for(int j = 0; j < nHeight; j++)
{
for(int i = 0; i < nWidth; i++)
{
RGBToYCbCr(pSrc[2],pSrc[1],pSrc[0],&Y,&CB,&CR);
*pY = Y;
*pCb = CB;
*pCr = CR;
pY++;
pCb++;
pCr++;
pSrc += 4;
}
}
GuidedFilter(yData, nWidth, nHeight, radius, delta);
pSrc = srcData;
pY = yData;
pCb = cbData;
pCr = crData;
int R, G, B;
for(int j = 0; j < nHeight; j++)
{
for(int i = 0; i < nWidth; i++)
{
YCbCrToRGB(*pY, *pCb, *pCr, &R, &G, &B);
pSrc[0] = B;
pSrc[1] = G;
pSrc[2] = R;
pY++;
pCb++;
pCr++;
pSrc += 4;
}
}
}
最后给出DEMO链接:点击打开链接
本人QQ: 1358009172