本文继续讲解另一种可以做磨皮算法的保边滤波器:BEEPS滤波
BEEPS滤波即Bi-Exponential Edge-Preserving Smoother,是一种保边滤波器。
改算法由Philippe Thevenaz在2012年提出,参考论文:Bi-Exponential Edge-Preserving Smoother;
论文算法流程如下:
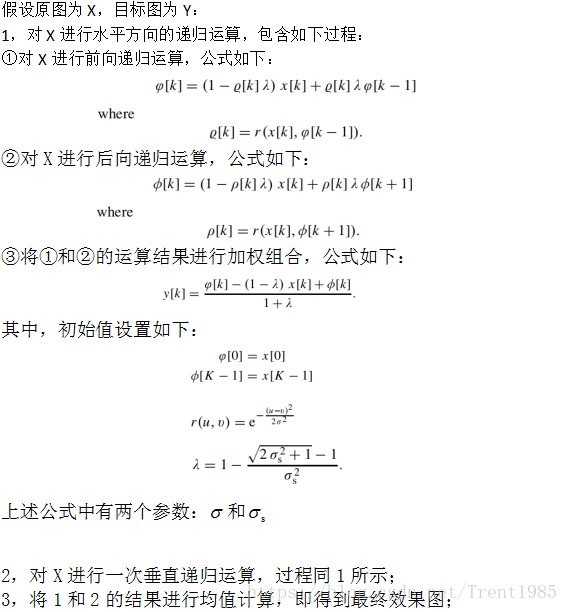
BEEPS的效果图如下所示:
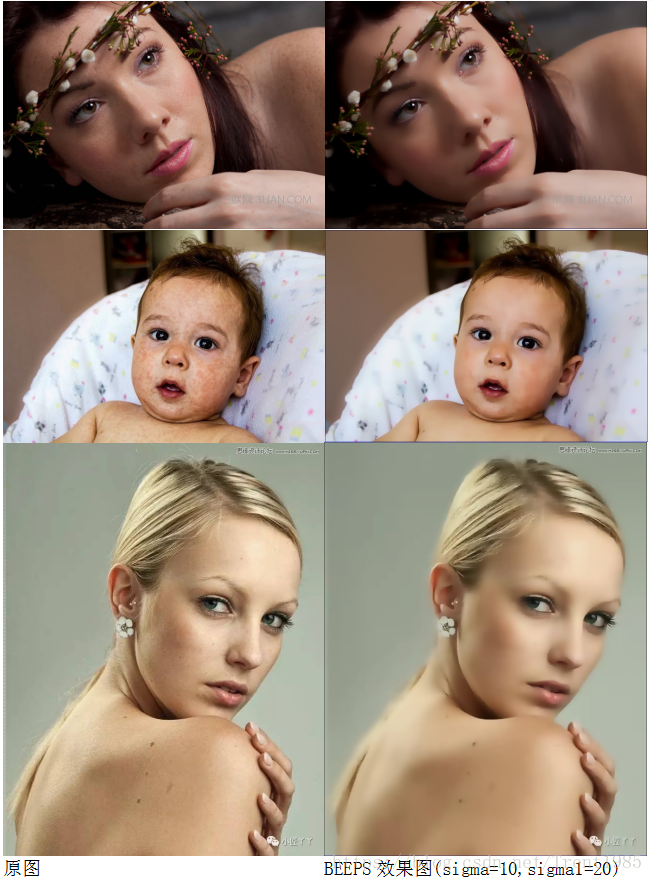
从效果图中可以看到,人像皮肤的瑕疵斑点被磨光了,而五官等的边缘细节依旧保留,因此,该算法也是可以用来做磨皮算法的。
本人用C#实现完整代码如下:
class BEEPS
{
private double[] gaussMap = new double[65025];
public void Initialize()
{
string t = "";
for (int i = 0; i < gaussMap.Length; i++)
{
gaussMap[i]=Math.Exp(-i);
t += gaussMap[i].ToString() + ",";
}
}
public unsafe void BEEPSProcess(IntPtr srcPtr, Int32 stride, Int32 width, Int32 height, double sigma,int c)
{
sigma = sigma > 50 ? 50 : sigma;
byte* pSrc = (byte*)srcPtr.ToPointer();
byte[] dstValue = new byte[height * stride];
byte[] hValue = BEEPSHorizontal(pSrc, stride, width, height, sigma, c);
byte[] vValue;
fixed (byte* p = hValue)
{
vValue = BEEPSVertical(p, stride, width, height, sigma, c);
}
hValue = BEEPSVertical(pSrc, stride, width, height, sigma, c);
fixed (byte* p = hValue)
{
dstValue = BEEPSHorizontal(p, stride, width, height, sigma, c);
}
for (int i = 0; i < dstValue.Length; i++)
{
*pSrc = (byte)((vValue[i] + dstValue[i]) / 2);
pSrc++;
}
}
private unsafe byte[] BEEPSHorizontal(byte* srcPtr, Int32 stride, Int32 width, Int32 height, double sigma, int c)
{
byte[] F = new byte[height * stride];
byte[] D = new byte[height * stride];
int[] s = new int[width * 3];
int[] v = new int[width * 3];
int pos = 0, X = 0, Y = 0;
int p = 0;
byte* data;
sigma = sigma * sigma * 2.0;
for (int y = 0; y < height; y++)
{
for (int x = 1; x < width; x++)
{
X = width - 1 - x;
Y = height - 1 - y;
if (x == 0)
{
pos = x * 3 + y * stride;
data = srcPtr + pos;
F[pos] = data[0];
s[0] = data[0];
++pos;
F[pos] = data[1];
s[1] = data[1];
++pos;
F[pos] = data[2];
s[2] = data[2];
p = X * 3;
pos = p + Y * stride;
data = srcPtr + pos;
v[p] = data[0];
D[pos] = data[0];
++pos;
++p;
v[p] = data[1];
D[pos] = data[1];
++pos;
++p;
v[p] = data[2];
D[pos] = data[2];
}
else
{
p = x * 3;
pos = p + y * stride;
data = srcPtr + pos;
s[p] = (int)(10.0 * Gaussian(data[0], F[pos - 3], sigma));
F[pos] = (byte)(((100 - s[p] * c) * data[0] + s[p] * c * F[pos - 3]) / 100);
++pos;
++p;
s[p] = (int)(10.0 * Gaussian(data[1], F[pos - 3], sigma));
F[pos] = (byte)(((100 - s[p] * c) * data[1] + s[p] * c * F[pos - 3]) / 100);
++pos;
++p;
s[p] = (int)(10.0 * Gaussian(data[2], F[pos - 3], sigma));
F[pos] = (byte)(((100 - s[p] * c) * data[2] + s[p] * c * F[pos - 3]) / 100);
p = X * 3;
pos = p + Y * stride;
data = srcPtr + pos;
v[p] = (int)(10.0 * Gaussian(data[0], D[pos + 3], sigma));
D[pos] = (byte)(((100 - v[p] * c) * data[0] + v[p] * c * D[pos + 3]) / 100);
++pos;
++p;
v[p] = (int)(10.0 * Gaussian(data[1], D[pos + 3], sigma));
D[pos] = (byte)(((100 - v[p] * c) * data[1] + v[p] * c * D[pos + 3]) / 100);
++pos;
++p;
v[p] = (int)(10.0 * Gaussian(data[2], D[pos + 3], sigma));
D[pos] = (byte)(((100 - v[p] * c) * data[2] + v[p] * c * D[pos + 3]) / 100);
}
}
}
data = srcPtr;
for (int i = 0; i < height * stride; i++)
{
D[i] = (byte)((10 * F[i] - (10 - c) * (*data) + 10 * D[i]) / (10 + c));
data++;
}
return D;
}
private unsafe byte[] BEEPSVertical(byte* srcPtr, Int32 stride, Int32 width, Int32 height, double sigma, int c)
{
byte[] F = new byte[height*stride];
byte[] D = new byte[height * stride];
int[] sR = new int[height];
int[] sG = new int[height];
int[] sB = new int[height];
int[] vR = new int[height];
int[] vG = new int[height];
int[] vB = new int[height];
int pos = 0, X = 0, Y = 0;
sigma = sigma * sigma * 2.0;
byte* data;
for (int x = 0; x < width; x++)
{
for (int y = 0; y < height; y++)
{
X = width - 1 - x;
Y = height - 1 - y;
if (y == 0)
{
pos = x * 3 + y * stride;
data = srcPtr + pos;
F[pos] = data[0];
sB[y] = data[0];
sG[y] = data[1];
sR[y] = data[2];
pos = X * 3 + Y * stride;
data = srcPtr + pos;
D[pos] = data[0];
vB[Y] = data[0];
vG[Y] = data[1];
vR[Y] = data[2];
}
else
{
pos = x * 3 + y * stride;
data = srcPtr + pos;
sB[y] = (int)(10.0 * Gaussian(data[0], F[pos - stride], sigma));
F[pos] = (byte)(((100 - sB[y] * c) * data[0] + sB[y] * c * F[pos - stride]) / 100);
sG[y] = (int)(10.0 * Gaussian(data[1], F[pos - stride + 1], sigma));
F[pos + 1] = (byte)(((100 - sG[y] * c) * data[1] + sG[y] * c * F[pos - stride + 1]) / 100);
sR[y] = (int)(10.0 * Gaussian(data[2], F[pos - stride + 2], sigma));
F[pos + 2] = (byte)(((100 - sR[y] * c) * data[2] + sR[y] * c * F[pos - stride + 2]) / 100);
pos = X * 3 + Y * stride;
data = srcPtr + pos;
vB[Y] = (int)(10.0 * Gaussian(data[0], D[pos + stride], sigma));
D[pos] = (byte)(((100 - vB[Y] * c) * data[0] + vB[Y] * c * D[pos + stride]) / 100);
vG[Y] = (int)(10.0 * Gaussian(data[1], D[pos + stride + 1], sigma));
D[pos + 1] = (byte)(((100 - vG[Y] * c) * data[1] + vG[Y] * c * D[pos + stride + 1]) / 100);
vR[Y] = (int)(10.0 * Gaussian(data[2], D[pos + stride + 2], sigma));
D[pos + 2] = (byte)(((100 - vR[Y] * c) * data[2] + vR[Y] * c * D[pos + stride + 2]) / 100);
}
}
}
data = srcPtr;
for (int i = 0; i < height*stride; i++)
{
D[i] = (byte)((10 * F[i] - (10 - c) * (*data) + 10 * D[i]) / (10 + c));
data++;
}
return D;
}
private double Gaussian(int u, int v, double sigma)
{
//int t = -(u - v) * (u - v);
//return Math.Exp((double)t / sigma);
int t = (u - v) * (u - v)/(int)sigma;
return gaussMap[t];
}最后给出一个完整的DEMO源码:
点击打开链接
本人QQ:1358009172