ROS2的Humble版本为TLS版本,维护日期截止到2027年(可以参考这里确查看Humble和Ubuntu系统的关系)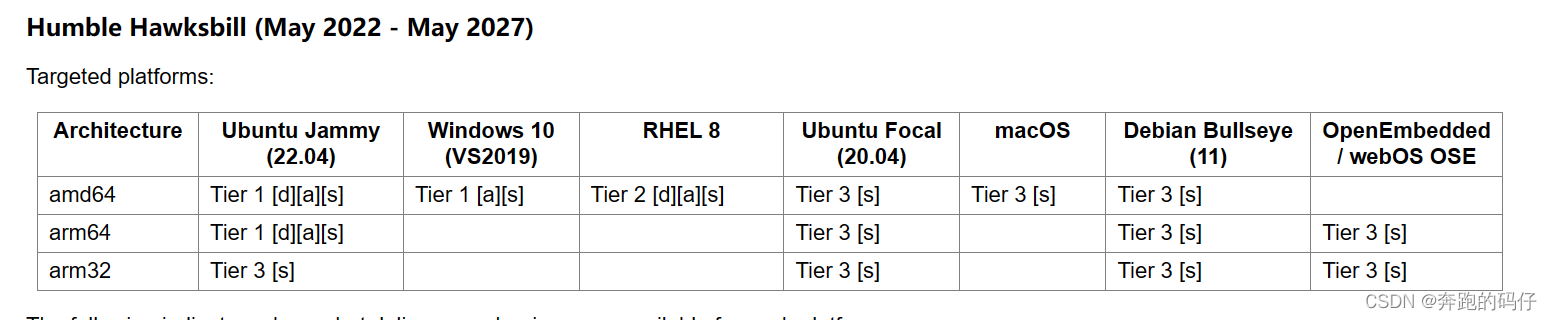
可以看到,其支持Linux/MacOS/Windows等多个系统,针对于Linux系统,对应的系统版本是(Ubuntu 22.04,Jammy),本文章记录ROS2 Humble Debian Packages安装包在Ubuntu 22.04下的安装过程,本文参考了ROS提供的官方安装指导,记录了过程中出现的问题。
资源
ROS2 Humble支持Ubuntu 22.04的amd64和arm64平台。
locale设置
确保系统的语言环境支持UTF-8,可以通过locale命令查看。
locale
ANG=zh_CN.UTF-8
LANGUAGE=zh_CN:zh
LC_CTYPE="zh_CN.UTF-8"
LC_NUMERIC="zh_CN.UTF-8"
LC_TIME="zh_CN.UTF-8"
LC_COLLATE="zh_CN.UTF-8"
LC_MONETARY="zh_CN.UTF-8"
LC_MESSAGES="zh_CN.UTF-8"
LC_PAPER="zh_CN.UTF-8"
LC_NAME="zh_CN.UTF-8"
LC_ADDRESS="zh_CN.UTF-8"
LC_TELEPHONE="zh_CN.UTF-8"
LC_MEASUREMENT="zh_CN.UTF-8"
LC_IDENTIFICATION="zh_CN.UTF-8"
LC_ALL=
设置源
您需要将 ROS 2 apt 存储库添加到您的系统中。
首先确保启用了 Ubuntu Universe 存储库。
sudo apt install software-properties-common
sudo add-apt-repository universe
现在添加带有 apt 的 ROS 2 GPG 密钥。
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
注意:国内如果不翻墙的话,不能直接访问raw.githubusercontent.com,可以参考该文章查询该网址的IP地址,通过将查询到的IP和raw.githubusercontent.com添加到/etc/hosts,解决该问题。
然后将存储库添加到源列表中。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装ROS包
设置存储库后更新 apt 存储库缓存。
sudo apt update
ROS 2 软件包建立在经常更新的 Ubuntu 系统上。 始终建议您在安装新软件包之前确保系统是最新的。
sudo apt upgrade
警告:由于 Ubuntu 22.04 中的早期更新,在安装 ROS 2 之前更新与 --相关的软件包非常重要。 在新安装的系统上安装 ROS 2 的依赖项而不进行升级可能会触发关键系统软件包的删除。
请参考ros2/ros2#1272 和 Launchpad #1974196。
推荐桌面版本安装:ROS,RViz,演示,教程,命令如下:
sudo apt install ros-humble-desktop
ros-dev-tools包括用于构建 ROS 包的编译器和其他工具,比如ros2工程的构建工具colcon,安装命令如下:
sudo apt install ros-dev-tools
注意:ros-humble-ros-base只包含通信库、消息包、命令行工具。 没有图形用户界面工具。对于新手不建议安装。
环境设置
通过获取以下文件来设置环境。
# Replace ".bash" with your shell if you're not using bash
# Possible values are: setup.bash, setup.sh, setup.zsh
source /opt/ros/humble/setup.bash
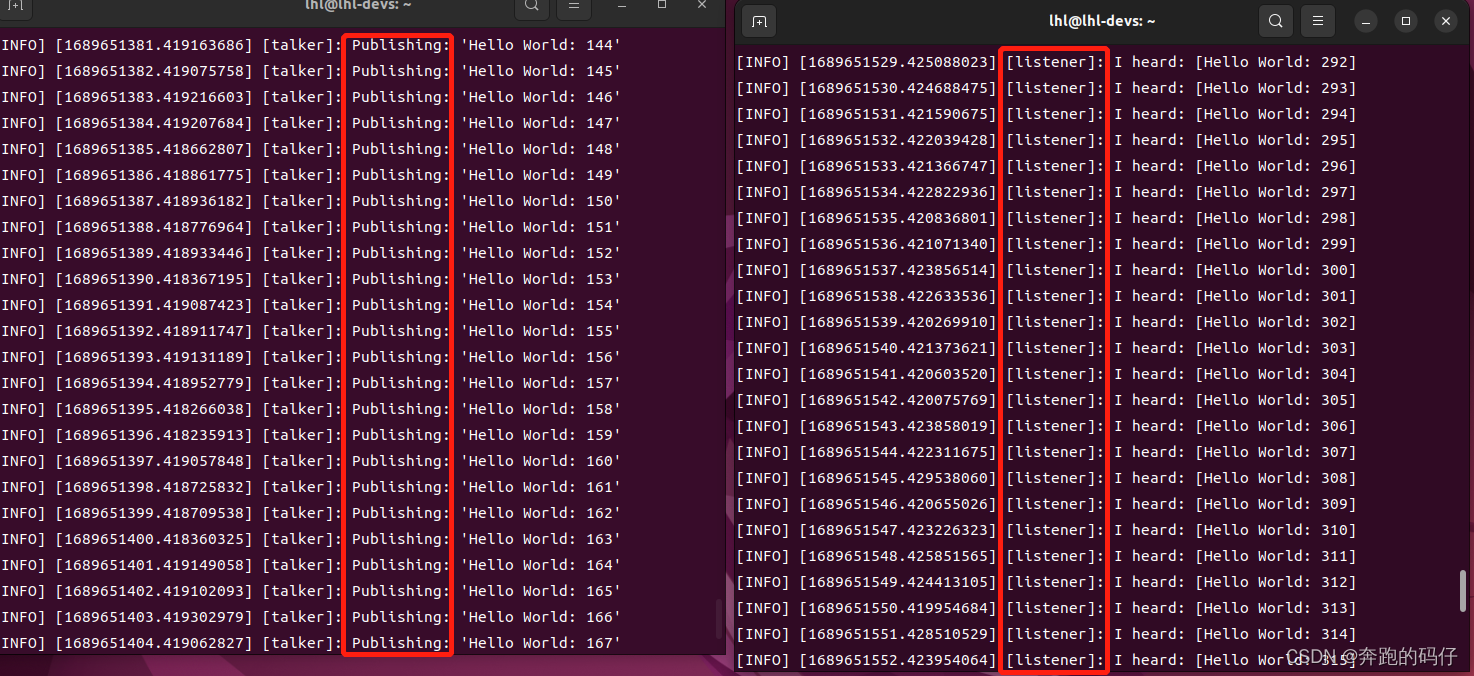
测试示例
talker,listener示例为了测试基于ROS的消息分发/订阅功能,同时可以测试ROS的C++和python API是否可用。
打开一个终端执行如下命令,启动talker:
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_cpp talker
打开另一个终端执行如下命令,启动listener:
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listener