在ROS中发布导航命令有三种方式(但其实本质上都是话题发送)
一、使用Rviz进行导航
最常见的导航是在Rviz中实现的导航,通过2D Nav Goal可以设置导航目标点,但实际上2D Nav Goal会操作三个话题均有输出:
/move_base/current_goal
/move_base/goal
/move_base_simple/goal
Rviz中导航操作的主要话题:/move_base_simple/goal
Rviz中初始位姿操作的主要话题:/initialpose
二、使用终端发布导航命令
向/move_base_simple中发数据
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped '{header: {frame_id: "map"},pose: {position:{x: -1.8,y: 0,z: 0},orientation: {x: 0,y: 0,z: 0,w: 1}}}'
向/move_base/current_goal中发数据
rostopic pub /move_base/current_goal geometry_msgs/PoseStamped '{header: {frame_id: "map"},pe: {position:{x: 1.8,y: 0,z: 0},orientation: {x: 0,y: 0,z: 0,w: 1}}}'
三、使用功能包代码发布
源代码模板如下(这里只提供了.cpp,还要配套的CMakeLists.txt和package.xml):
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main() {
MoveBaseClient ac("move_base", true);
// waitForResult()会阻塞当前线程,直到有结果才会退出(一前/一后导航会先前,执行完了再后)
ac.waitForServer(ros::Duration(60));
move_base_msgs::MoveBaseGoal goal;
// 对goal进行填充
ac.sendGoal(goal);
ac.waitForResult();
if (ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("You have reached the goal!");
else
ROS_INFO("The base failed for some reason"); return 0;
}
ac.sendGoal是有三个回调的:ac.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
参考http://wiki.ros.org/cn/actionlib_tutorials/Tutorials/Writing%20a%20Callback%20Based%20Simple%20Action%20Client
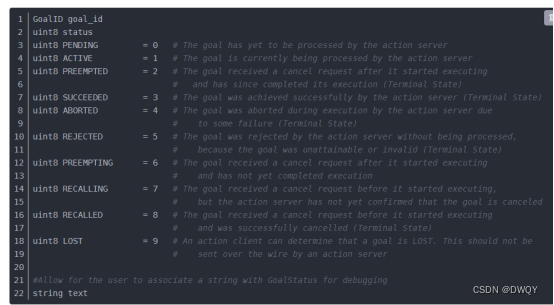
SimpleClientGoalState状态如下:
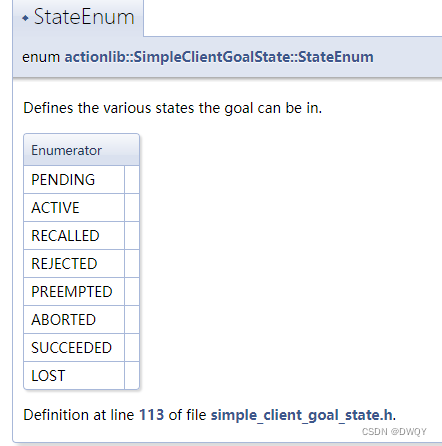
参考:
https://docs.ros.org/en/api/actionlib/html/classactionlib_1_1SimpleClientGoalState.html
https://blog.csdn.net/abcwoabcwo/article/details/103536376