目录
1 算法效率评估
在算法设计中,我们先后追求以下两个层面的目标。
- 找到问题解法:算法需要在规定的输入范围内,可靠地求得问题的正确解。
- 寻求最优解法:同一个问题可能存在多种解法,我们希望找到尽可能高效的算法。
也就是说,在能够解决问题的前提下,算法效率已成为衡量算法优劣的主要评价指标,它包括以下两个维度。
- 时间效率:算法运行速度的快慢。
- 空间效率:算法占用内存空间的大小。
简而言之,我们的目标是设计“既快又省”的数据结构与算法。而有效地评估算法效率至关重要,因为只有这样我们才能将各种算法进行对比,从而指导算法设计与优化过程。
效率评估方法主要分为两种:实际测试、理论估算。
1.1 实际测试
假设我们现在有算法 A 和算法 B ,它们都能解决同一问题,现在需要对比这两个算法的效率。最直接的方法是找一台计算机,运行这两个算法,并监控记录它们的运行时间和内存占用情况。这种评估方式能够反映真实情况,但也存在较大局限性。
一方面,难以排除测试环境的干扰因素。硬件配置会影响算法的性能表现。比如在某台计算机中,算法 A 的运行时间比算法 B 短;但在另一台配置不同的计算机中,我们可能得到相反的测试结果。这意味着我们需要在各种机器上进行测试,统计平均效率,而这是不现实的。
另一方面,展开完整测试非常耗费资源。随着输入数据量的变化,算法会表现出不同的效率。例如,在输入数据量较小时,算法 A 的运行时间比算法 B 更少;而输入数据量较大时,测试结果可能恰恰相反。因此,为了得到有说服力的结论,我们需要测试各种规模的输入数据,而这需要耗费大量的计算资源。
1.2 理论估算
由于实际测试具有较大的局限性,我们可以考虑仅通过一些计算来评估算法的效率。这种估算方法被称为「渐近复杂度分析 asymptotic complexity analysis」,简称「复杂度分析」。
复杂度分析体现算法运行所需的时间(空间)资源与输入数据大小之间的关系。它描述了随着输入数据大小的增加,算法执行所需时间和空间的增长趋势。这个定义有些拗口,我们可以将其分为三个重点来理解。
- “时间和空间资源”分别对应「时间复杂度 time complexity」和「空间复杂度 space complexity」。
- “随着输入数据大小的增加”意味着复杂度反映了算法运行效率与输入数据体量之间的关系。
- “时间和空间的增长趋势”表示复杂度分析关注的不是运行时间或占用空间的具体值,而是时间或空间增长的“快慢”。
复杂度分析克服了实际测试方法的弊端,体现在以下两个方面。
- 它独立于测试环境,分析结果适用于所有运行平台。
- 它可以体现不同数据量下的算法效率,尤其是在大数据量下的算法性能。
Tip
如果你仍对复杂度的概念感到困惑,无须担心,我们会在后续章节中详细介绍。
复杂度分析为我们提供了一把评估算法效率的“标尺”,使我们可以衡量执行某个算法所需的时间和空间资源,对比不同算法之间的效率。
复杂度是个数学概念,对于初学者可能比较抽象,学习难度相对较高。从这个角度看,复杂度分析可能不太适合作为最先介绍的内容。然而,当我们讨论某个数据结构或算法的特点时,难以避免要分析其运行速度和空间使用情况。
综上所述,建议你在深入学习数据结构与算法之前,先对复杂度分析建立初步的了解,以便能够完成简单算法的复杂度分析。
2 迭代与递归
在数据结构与算法中,重复执行某个任务是很常见的,其与算法的复杂度密切相关。而要重复执行某个任务,我们通常会选用两种基本的程序结构:迭代和递归。
2.1 迭代
「迭代 iteration」是一种重复执行某个任务的控制结构。在迭代中,程序会在满足一定的条件下重复执行某段代码,直到这个条件不再满足。
1. for 循环
for 循环是最常见的迭代形式之一,适合预先知道迭代次数时使用。
以下函数基于 for 循环实现了求和 1+2+⋯+n ,求和结果使用变量 res 记录。需要注意的是,Python 中 range(a, b) 对应的区间是“左闭右开”的,对应的遍历范围为 a,a+1,…,b−1 。
/* for 循环 */
int forLoop(int n) {
int res = 0;
// 循环求和 1, 2, ..., n-1, n
for (int i = 1; i <= n; i++) {
res += i;
}
return res;
}
图 2-1 展示了该求和函数的流程框图。
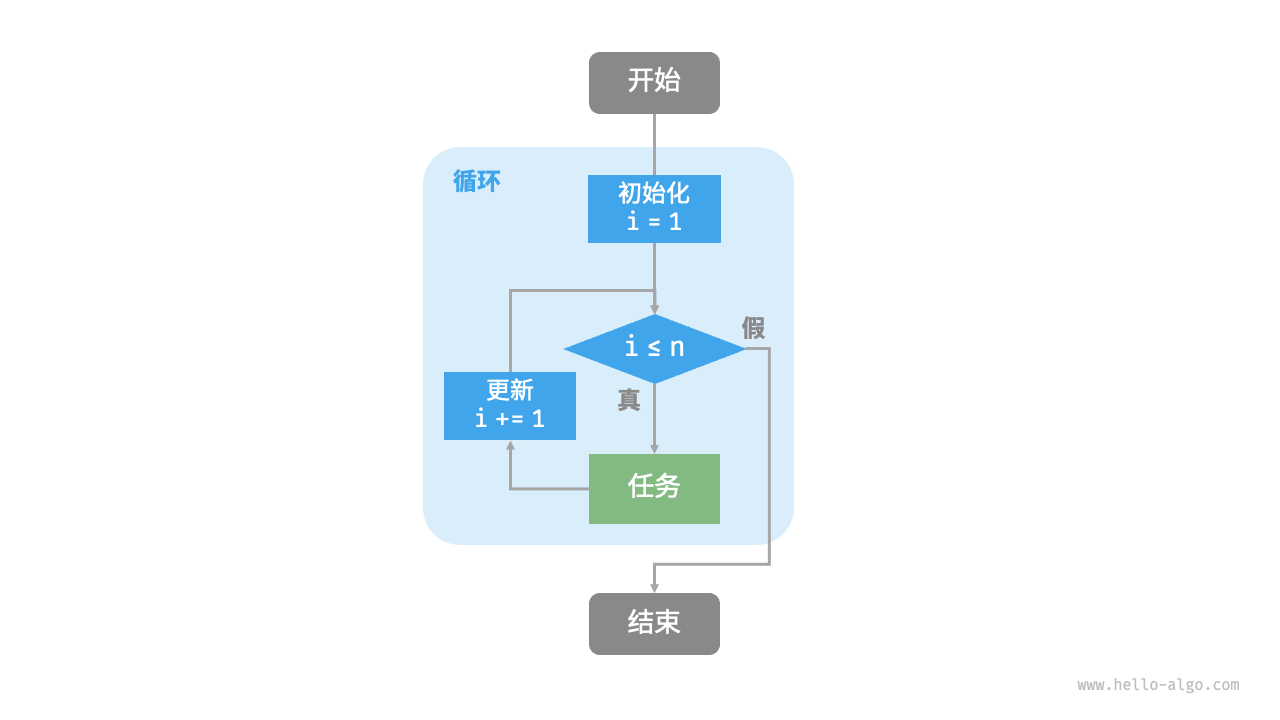
图 2-1 求和函数的流程框图
此求和函数的操作数量与输入数据大小 n成正比,或者说成“线性关系”。实际上,时间复杂度描述的就是这个“线性关系”。相关内容将会在下一节中详细介绍。
2. while 循环
与 for 循环类似,while 循环也是一种实现迭代的方法。在 while 循环中,程序每轮都会先检查条件,如果条件为真则继续执行,否则就结束循环。
下面,我们用 while 循环来实现求和 1+2+⋯+�n。
/* while 循环 */
int whileLoop(int n) {
int res = 0;
int i = 1; // 初始化条件变量
// 循环求和 1, 2, ..., n-1, n
while (i <= n) {
res += i;
i++; // 更新条件变量
}
return res;
}
在 while 循环中,由于初始化和更新条件变量的步骤是独立在循环结构之外的,因此它比 for 循环的自由度更高。
例如在以下代码中,条件变量 i 每轮进行了两次更新,这种情况就不太方便用 for 循环实现。
/* while 循环(两次更新) */
int whileLoopII(int n) {
int res = 0;
int i = 1; // 初始化条件变量
// 循环求和 1, 4, ...
while (i <= n) {
res += i;
// 更新条件变量
i++;
i *= 2;
}
return res;
}
总的来说,for 循环的代码更加紧凑,while 循环更加灵活,两者都可以实现迭代结构。选择使用哪一个应该根据特定问题的需求来决定。
3. 嵌套循环
我们可以在一个循环结构内嵌套另一个循环结构,以 for 循环为例:
/* 双层 for 循环 */
char *nestedForLoop(int n) {
// n * n 为对应点数量,"(i, j), " 对应字符串长最大为 6+10*2,加上最后一个空字符 \0 的额外空间
int size = n * n * 26 + 1;
char *res = malloc(size * sizeof(char));
// 循环 i = 1, 2, ..., n-1, n
for (int i = 1; i <= n; i++) {
// 循环 j = 1, 2, ..., n-1, n
for (int j = 1; j <= n; j++) {
char tmp[26];
snprintf(tmp, sizeof(tmp), "(%d, %d), ", i, j);
strncat(res, tmp, size - strlen(res) - 1);
}
}
return res;
}
图 2-2 给出了该嵌套循环的流程框图。
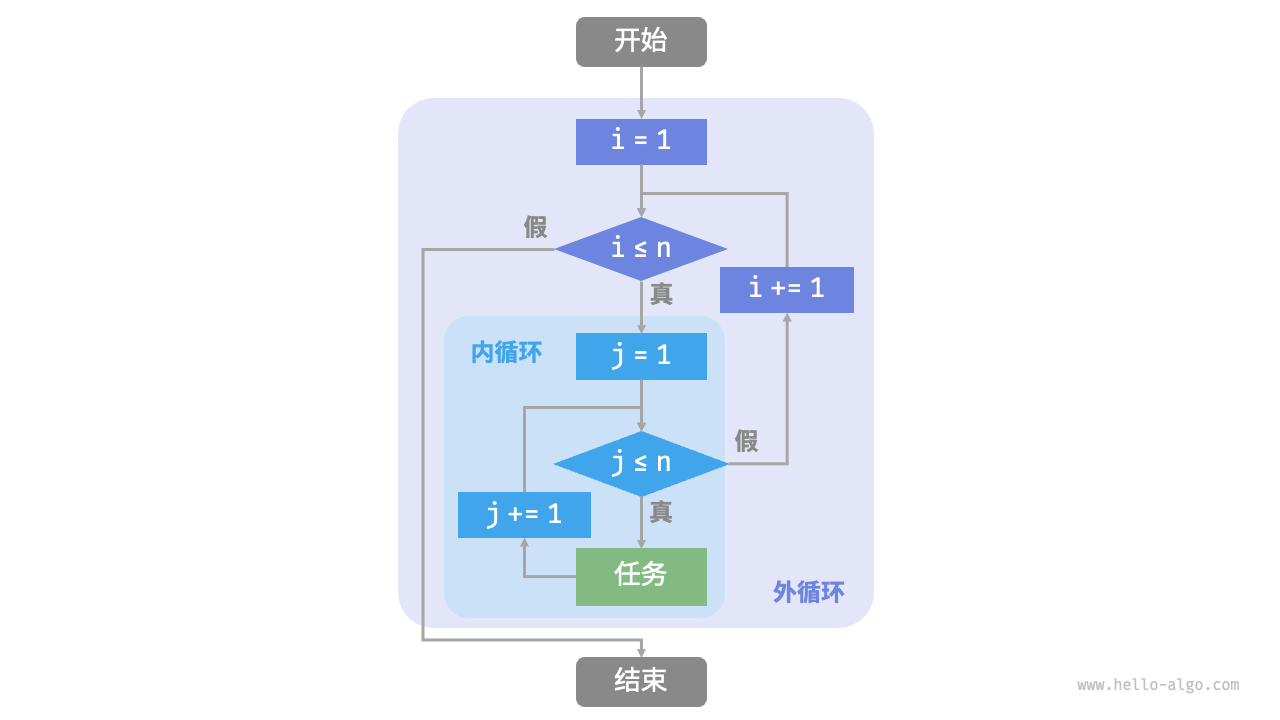
图 2-2 嵌套循环的流程框图
在这种情况下,函数的操作数量与 �2 成正比,或者说算法运行时间和输入数据大小 � 成“平方关系”。
我们可以继续添加嵌套循环,每一次嵌套都是一次“升维”,将会使时间复杂度提高至“立方关系”、“四次方关系”、以此类推。
2.2 递归
「递归 recursion」是一种算法策略,通过函数调用自身来解决问题。它主要包含两个阶段。
- 递:程序不断深入地调用自身,通常传入更小或更简化的参数,直到达到“终止条件”。
- 归:触发“终止条件”后,程序从最深层的递归函数开始逐层返回,汇聚每一层的结果。
而从实现的角度看,递归代码主要包含三个要素。
- 终止条件:用于决定什么时候由“递”转“归”。
- 递归调用:对应“递”,函数调用自身,通常输入更小或更简化的参数。
- 返回结果:对应“归”,将当前递归层级的结果返回至上一层。
观察以下代码,我们只需调用函数 recur(n) ,就可以完成 1+2+⋯+n 的计算:
/* 递归 */
int recur(int n) {
// 终止条件
if (n == 1)
return 1;
// 递:递归调用
int res = recur(n - 1);
// 归:返回结果
return n + res;
}
图 2-3 展示了该函数的递归过程。
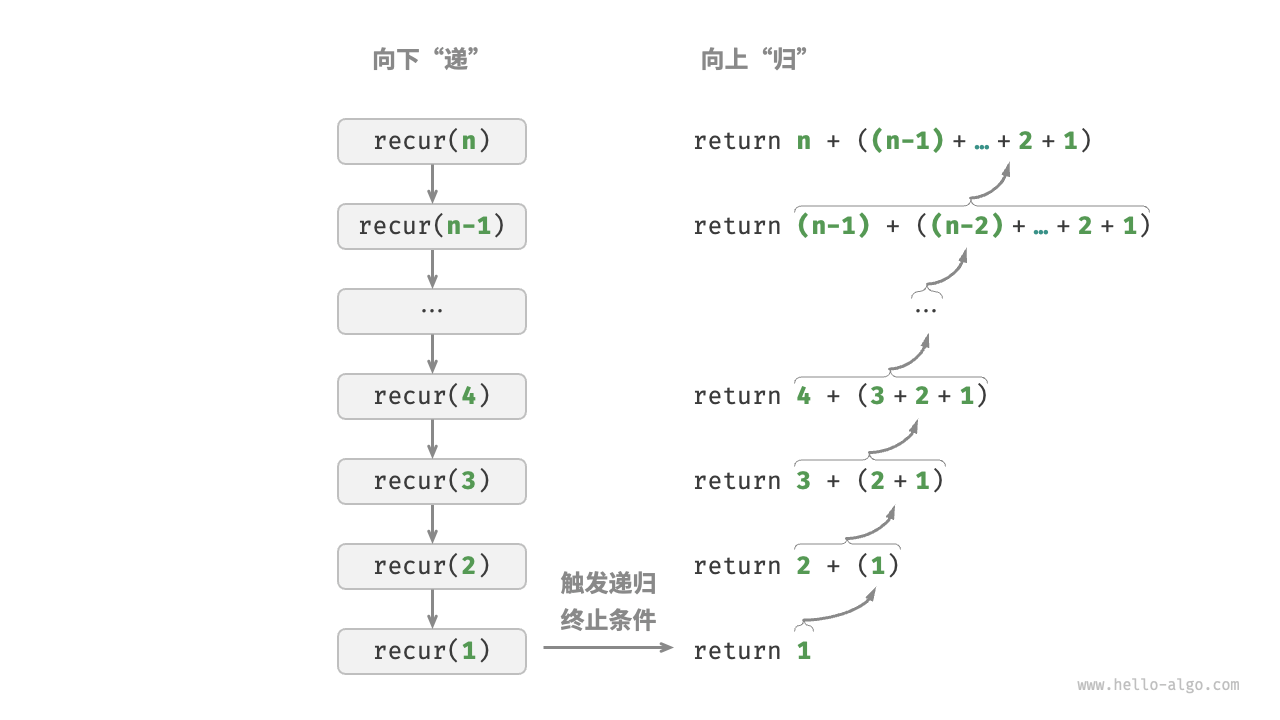
图 2-3 求和函数的递归过程
虽然从计算角度看,迭代与递归可以得到相同的结果,但它们代表了两种完全不同的思考和解决问题的范式。
- 迭代:“自下而上”地解决问题。从最基础的步骤开始,然后不断重复或累加这些步骤,直到任务完成。
- 递归:“自上而下”地解决问题。将原问题分解为更小的子问题,这些子问题和原问题具有相同的形式。接下来将子问题继续分解为更小的子问题,直到基本情况时停止(基本情况的解是已知的)。
以上述的求和函数为例,设问题 f(n)=1+2+⋯+n 。
- 迭代:在循环中模拟求和过程,从 1 遍历到 �n,每轮执行求和操作,即可求得 f(n) 。
- 递归:将问题分解为子问题 f(n)=n+f(n−1) ,不断(递归地)分解下去,直至基本情况 f(1)=1 时终止。
1. 调用栈
递归函数每次调用自身时,系统都会为新开启的函数分配内存,以存储局部变量、调用地址和其他信息等。这将导致两方面的结果。
- 函数的上下文数据都存储在称为“栈帧空间”的内存区域中,直至函数返回后才会被释放。因此,递归通常比迭代更加耗费内存空间。
- 递归调用函数会产生额外的开销。因此递归通常比循环的时间效率更低。
如图 2-4 所示,在触发终止条件前,同时存在 n 个未返回的递归函数,递归深度为 n 。
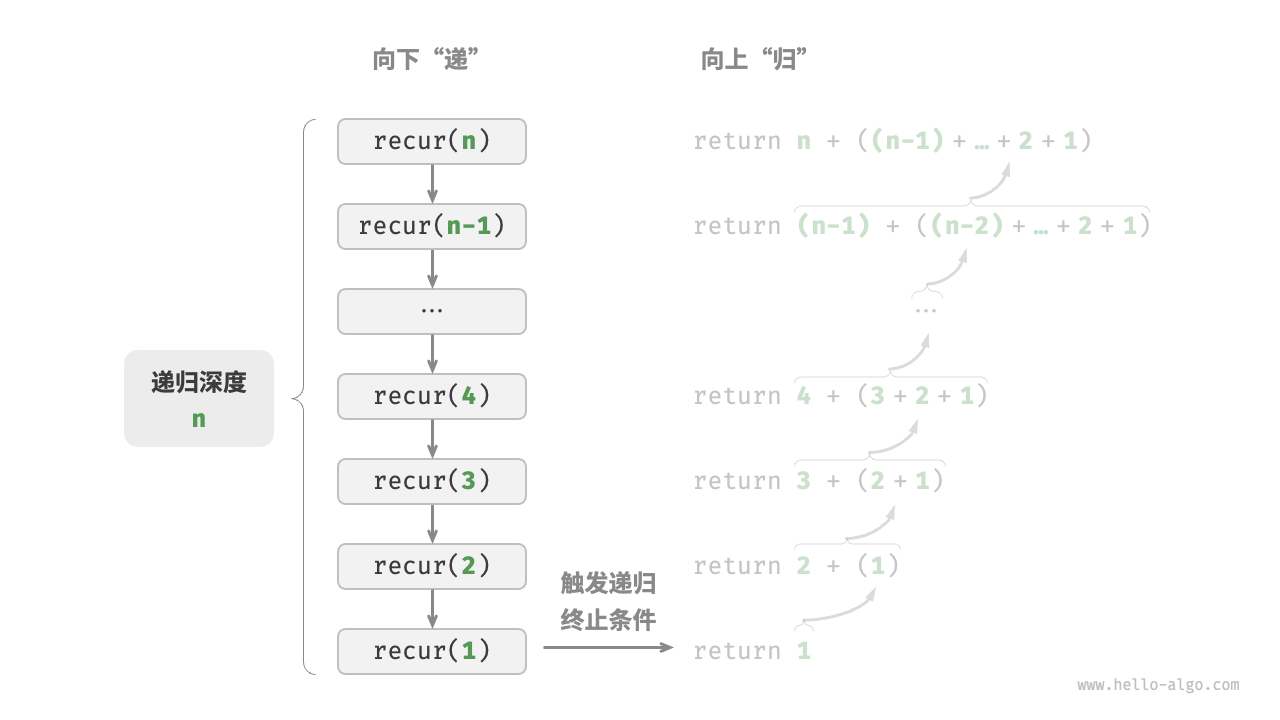
图 2-4 递归调用深度
在实际中,编程语言允许的递归深度通常是有限的,过深的递归可能导致栈溢出报错。
2. 尾递归
有趣的是,如果函数在返回前的最后一步才进行递归调用,则该函数可以被编译器或解释器优化,使其在空间效率上与迭代相当。这种情况被称为「尾递归 tail recursion」。
- 普通递归:当函数返回到上一层级的函数后,需要继续执行代码,因此系统需要保存上一层调用的上下文。
- 尾递归:递归调用是函数返回前的最后一个操作,这意味着函数返回到上一层级后,无需继续执行其他操作,因此系统无需保存上一层函数的上下文。
以计算 1+2+⋯+n 为例,我们可以将结果变量 res 设为函数参数,从而实现尾递归。
/* 尾递归 */
int tailRecur(int n, int res) {
// 终止条件
if (n == 0)
return res;
// 尾递归调用
return tailRecur(n - 1, res + n);
}
尾递归的执行过程如图 2-5 所示。对比普通递归和尾递归,求和操作的执行点是不同的。
- 普通递归:求和操作是在“归”的过程中执行的,每层返回后都要再执行一次求和操作。
- 尾递归:求和操作是在“递”的过程中执行的,“归”的过程只需层层返回。
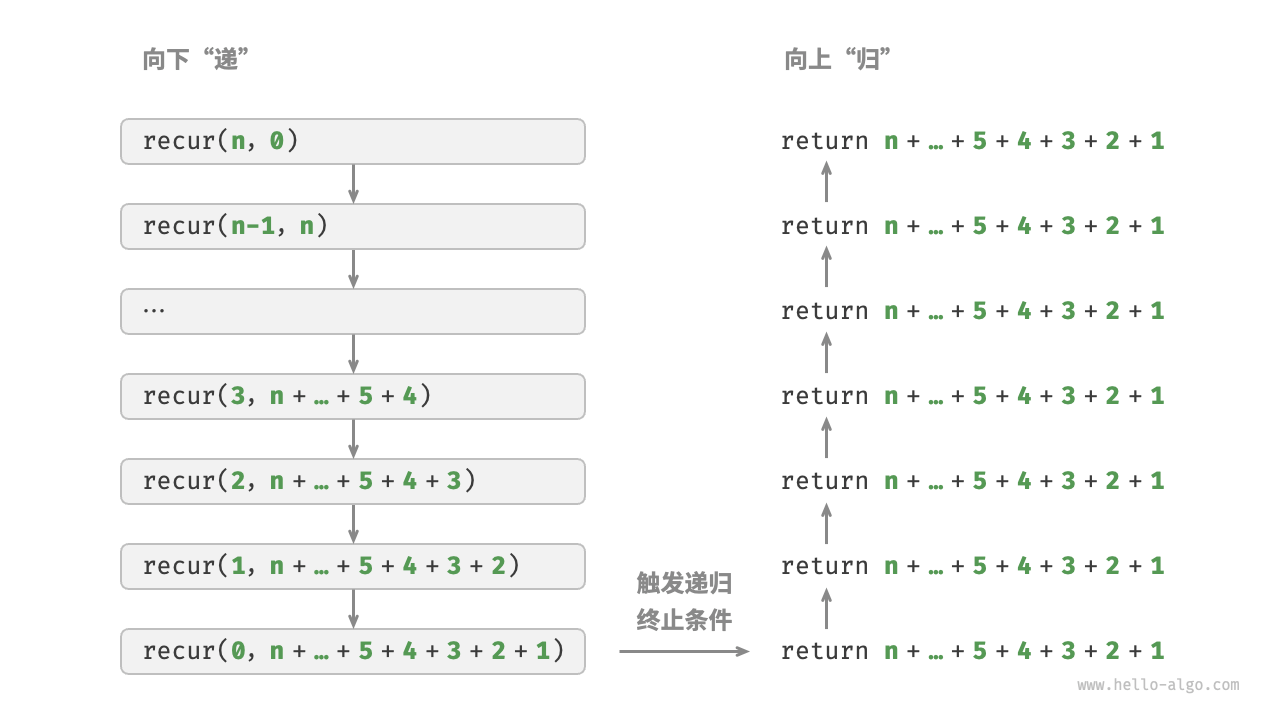
图 2-5 尾递归过程
Tip
请注意,许多编译器或解释器并不支持尾递归优化。例如,Python 默认不支持尾递归优化,因此即使函数是尾递归形式,但仍然可能会遇到栈溢出问题。
3. 递归树
当处理与“分治”相关的算法问题时,递归往往比迭代的思路更加直观、代码更加易读。以“斐波那契数列”为例。
Question
给定一个斐波那契数列 0,1,1,2,3,5,8,13,… ,求该数列的第 � 个数字。
设斐波那契数列的第 n个数字为 f(n) ,易得两个结论。
- 数列的前两个数字为 f(1)=0 和 f(2)=1 。
- 数列中的每个数字是前两个数字的和,即 f(n)=f(n−1)+f(n−2) 。
按照递推关系进行递归调用,将前两个数字作为终止条件,便可写出递归代码。调用 fib(n) 即可得到斐波那契数列的第 n 个数字。
/* 斐波那契数列:递归 */
int fib(int n) {
// 终止条件 f(1) = 0, f(2) = 1
if (n == 1 || n == 2)
return n - 1;
// 递归调用 f(n) = f(n-1) + f(n-2)
int res = fib(n - 1) + fib(n - 2);
// 返回结果 f(n)
return res;
}
观察以上代码,我们在函数内递归调用了两个函数,这意味着从一个调用产生了两个调用分支。如图 2-6 所示,这样不断递归调用下去,最终将产生一个层数为 n 的「递归树 recursion tree」。
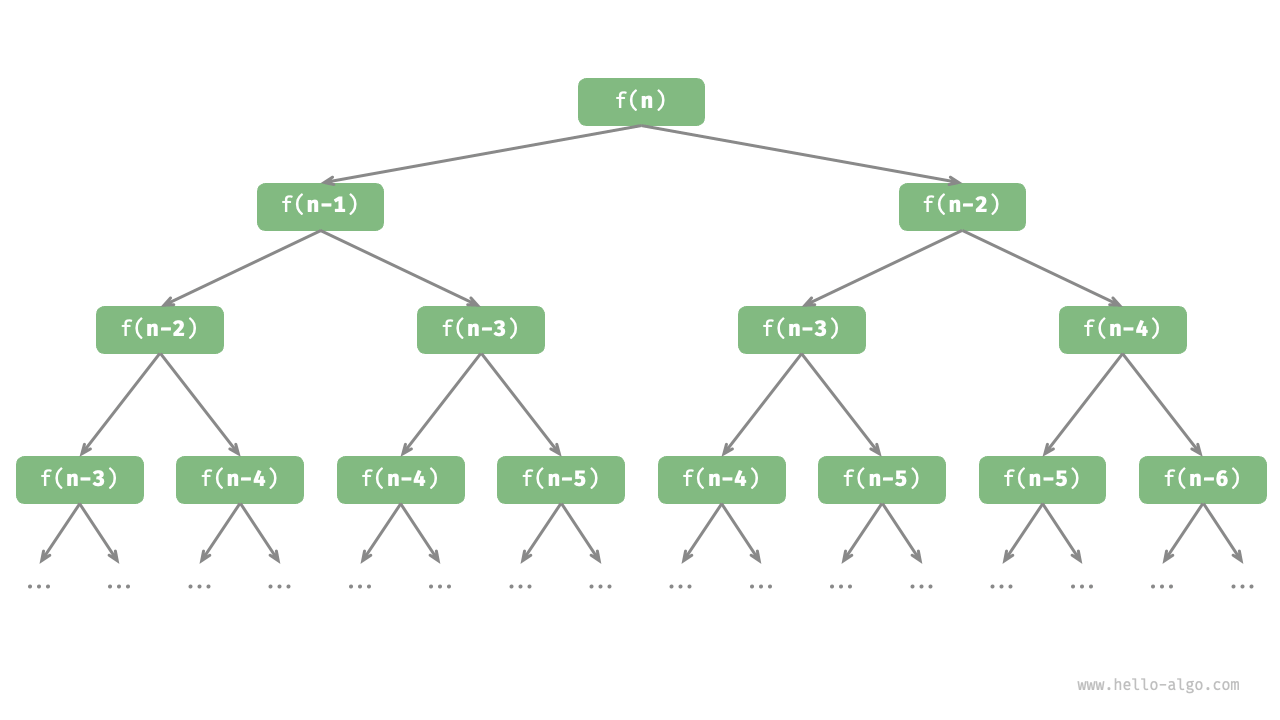
图 2-6 斐波那契数列的递归树
本质上看,递归体现“将问题分解为更小子问题”的思维范式,这种分治策略是至关重要的。
- 从算法角度看,搜索、排序、回溯、分治、动态规划等许多重要算法策略都直接或间接地应用这种思维方式。
- 从数据结构角度看,递归天然适合处理链表、树和图的相关问题,因为它们非常适合用分治思想进行分析。
2.3 两者对比
总结以上内容,如表 2-1 所示,迭代和递归在实现、性能和适用性上有所不同。
表 2-1 迭代与递归特点对比
| 迭代 | 递归 | |
|---|---|---|
| 实现方式 | 循环结构 | 函数调用自身 |
| 时间效率 | 效率通常较高,无函数调用开销 | 每次函数调用都会产生开销 |
| 内存使用 | 通常使用固定大小的内存空间 | 累积函数调用可能使用大量的栈帧空间 |
| 适用问题 | 适用于简单循环任务,代码直观、可读性好 | 适用于子问题分解,如树、图、分治、回溯等,代码结构简洁、清晰 |
Tip
如果感觉以下内容理解困难,可以在读完“栈”章节后再来复习。
那么,迭代和递归具有什么内在联系呢?以上述的递归函数为例,求和操作在递归的“归”阶段进行。这意味着最初被调用的函数实际上是最后完成其求和操作的,这种工作机制与栈的“先入后出”原则是异曲同工的。
事实上,“调用栈”和“栈帧空间”这类递归术语已经暗示了递归与栈之间的密切关系。
- 递:当函数被调用时,系统会在“调用栈”上为该函数分配新的栈帧,用于存储函数的局部变量、参数、返回地址等数据。
- 归:当函数完成执行并返回时,对应的栈帧会从“调用栈”上被移除,恢复之前函数的执行环境。
因此,我们可以使用一个显式的栈来模拟调用栈的行为,从而将递归转化为迭代形式:
[class]{}-[func]{forLoopRecur}
观察以上代码,当递归被转换为迭代后,代码变得更加复杂了。尽管迭代和递归在很多情况下可以互相转换,但也不一定值得这样做,有以下两点原因。
- 转化后的代码可能更加难以理解,可读性更差。
- 对于某些复杂问题,模拟系统调用栈的行为可能非常困难。
总之,选择迭代还是递归取决于特定问题的性质。在编程实践中,权衡两者的优劣并根据情境选择合适的方法是至关重要的。
3 时间复杂度
运行时间可以直观且准确地反映算法的效率。如果我们想要准确预估一段代码的运行时间,应该如何操作呢?
- 确定运行平台,包括硬件配置、编程语言、系统环境等,这些因素都会影响代码的运行效率。
- 评估各种计算操作所需的运行时间,例如加法操作
+需要 1 ns ,乘法操作*需要 10 ns ,打印操作print()需要 5 ns 等。 - 统计代码中所有的计算操作,并将所有操作的执行时间求和,从而得到运行时间。
例如在以下代码中,输入数据大小为 n :
// 在某运行平台下
void algorithm(int n) {
int a = 2; // 1 ns
a = a + 1; // 1 ns
a = a * 2; // 10 ns
// 循环 n 次
for (int i = 0; i < n; i++) { // 1 ns ,每轮都要执行 i++
printf("%d", 0); // 5 ns
}
}
根据以上方法,可以得到算法运行时间为 6n+12 ns :
1+1+10+(1+5)×n=6n+12
但实际上,统计算法的运行时间既不合理也不现实。首先,我们不希望将预估时间和运行平台绑定,因为算法需要在各种不同的平台上运行。其次,我们很难获知每种操作的运行时间,这给预估过程带来了极大的难度。
3.1 统计时间增长趋势
时间复杂度分析统计的不是算法运行时间,而是算法运行时间随着数据量变大时的增长趋势。
“时间增长趋势”这个概念比较抽象,我们通过一个例子来加以理解。假设输入数据大小为 n ,给定三个算法函数 A、B 和 C :
// 算法 A 的时间复杂度:常数阶
void algorithm_A(int n) {
printf("%d", 0);
}
// 算法 B 的时间复杂度:线性阶
void algorithm_B(int n) {
for (int i = 0; i < n; i++) {
printf("%d", 0);
}
}
// 算法 C 的时间复杂度:常数阶
void algorithm_C(int n) {
for (int i = 0; i < 1000000; i++) {
printf("%d", 0);
}
}
图 2-7 展示了以上三个算法函数的时间复杂度。
- 算法
A只有 1 个打印操作,算法运行时间不随着 n 增大而增长。我们称此算法的时间复杂度为“常数阶”。 - 算法
B中的打印操作需要循环 n次,算法运行时间随着 n增大呈线性增长。此算法的时间复杂度被称为“线性阶”。 - 算法
C中的打印操作需要循环 1000000 次,虽然运行时间很长,但它与输入数据大小 n 无关。因此C的时间复杂度和A相同,仍为“常数阶”。
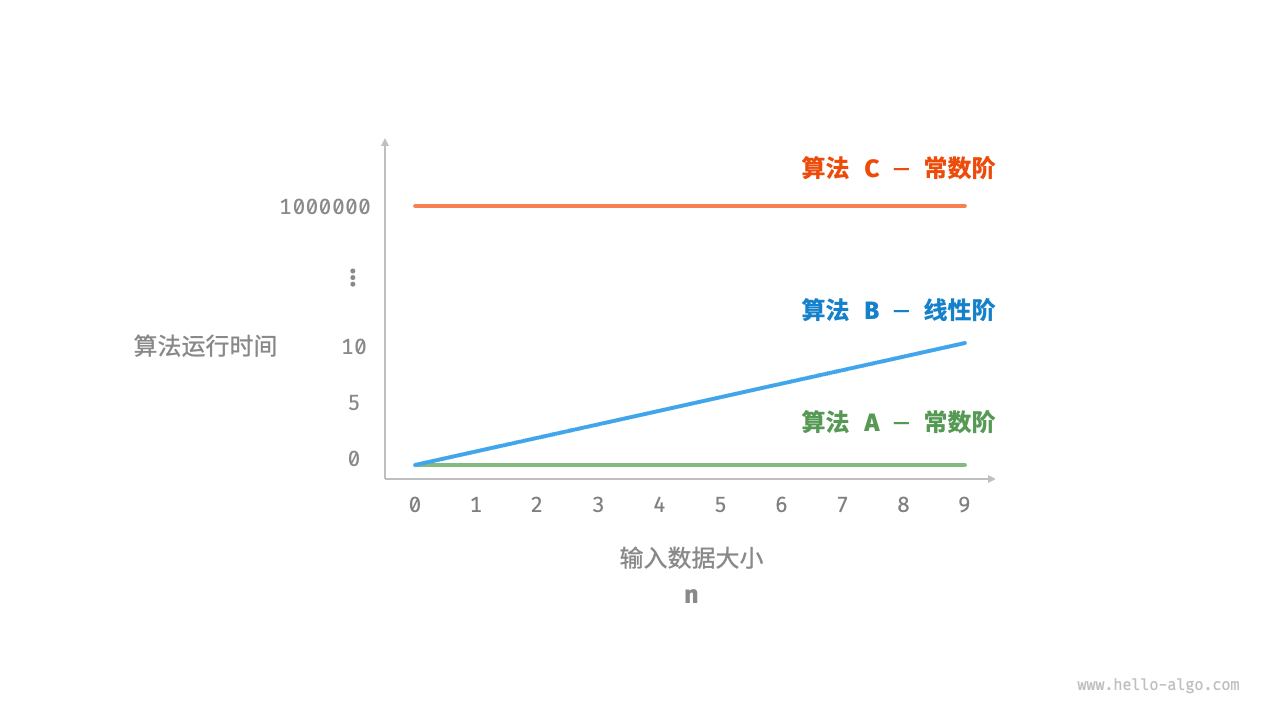
图 2-7 算法 A、B 和 C 的时间增长趋势
相较于直接统计算法运行时间,时间复杂度分析有哪些特点呢?
- 时间复杂度能够有效评估算法效率。例如,算法
B的运行时间呈线性增长,在 n>1 时比算法A更慢,在 n>1000000 时比算法C更慢。事实上,只要输入数据大小 n足够大,复杂度为“常数阶”的算法一定优于“线性阶”的算法,这正是时间增长趋势所表达的含义。 - 时间复杂度的推算方法更简便。显然,运行平台和计算操作类型都与算法运行时间的增长趋势无关。因此在时间复杂度分析中,我们可以简单地将所有计算操作的执行时间视为相同的“单位时间”,从而将“计算操作的运行时间的统计”简化为“计算操作的数量的统计”,这样以来估算难度就大大降低了。
- 时间复杂度也存在一定的局限性。例如,尽管算法
A和C的时间复杂度相同,但实际运行时间差别很大。同样,尽管算法B的时间复杂度比C高,但在输入数据大小 n较小时,算法B明显优于算法C。在这些情况下,我们很难仅凭时间复杂度判断算法效率的高低。当然,尽管存在上述问题,复杂度分析仍然是评判算法效率最有效且常用的方法。
3.2 函数渐近上界
给定一个输入大小为 n 的函数:
void algorithm(int n) {
int a = 1; // +1
a = a + 1; // +1
a = a * 2; // +1
// 循环 n 次
for (int i = 0; i < n; i++) { // +1(每轮都执行 i ++)
printf("%d", 0); // +1
}
}
设算法的操作数量是一个关于输入数据大小 n的函数,记为 T(n) ,则以上函数的的操作数量为:
T(n)=3+2n
T(n) 是一次函数,说明其运行时间的增长趋势是线性的,因此它的时间复杂度是线性阶。
我们将线性阶的时间复杂度记为 O(n) ,这个数学符号称为「大 O记号 big-O notation」,表示函数 T(n) 的「渐近上界 asymptotic upper bound」。
时间复杂度分析本质上是计算“操作数量函数 T(n)”的渐近上界,其具有明确的数学定义。
如图 2-8 所示,计算渐近上界就是寻找一个函数 f(n) ,使得当 n趋向于无穷大时,T(n) 和 f(n) 处于相同的增长级别,仅相差一个常数项 c的倍数。
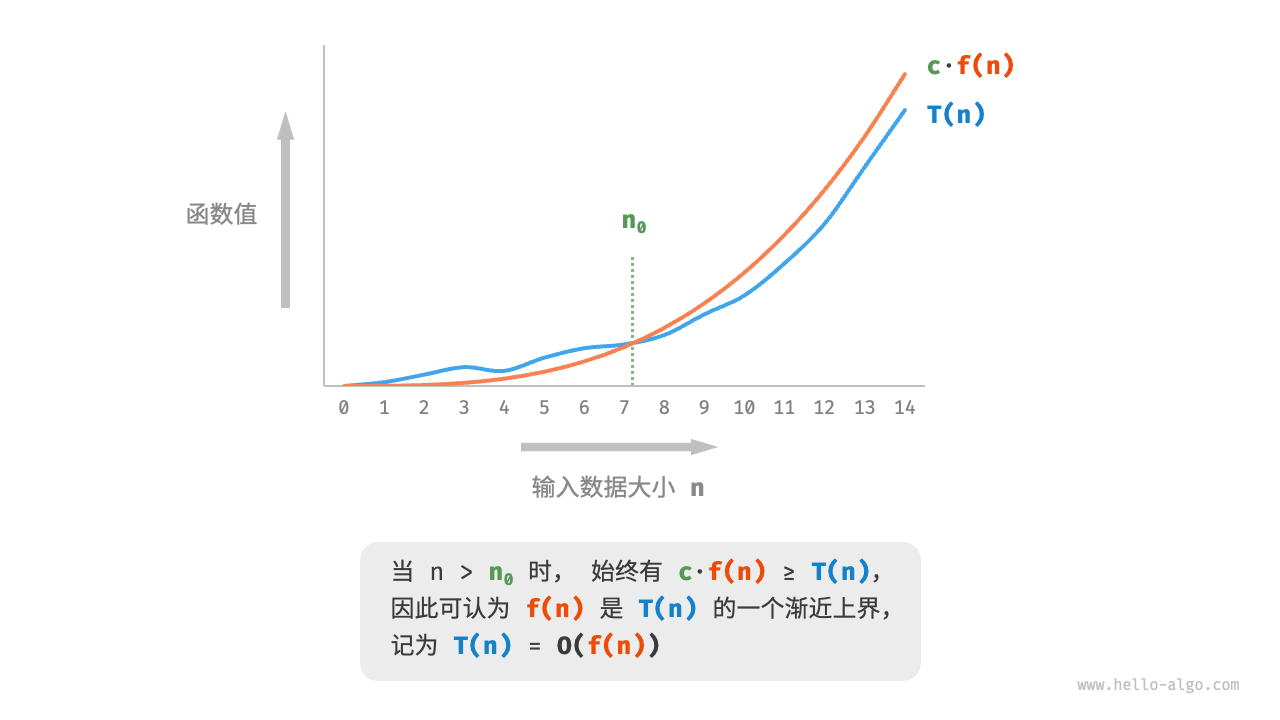
图 2-8 函数的渐近上界
3.3 推算方法
渐近上界的数学味儿有点重,如果你感觉没有完全理解,也无须担心。因为在实际使用中,我们只需要掌握推算方法,数学意义就可以逐渐领悟。
1. 第一步:统计操作数量
针对代码,逐行从上到下计算即可。然而,由于上述 c⋅f(n) 中的常数项 c 可以取任意大小,因此操作数量 f(n) 中的各种系数、常数项都可以被忽略。根据此原则,可以总结出以下计数简化技巧。
- 忽略 f(n) 中的常数项。因为它们都与 n 无关,所以对时间复杂度不产生影响。
- 省略所有系数。例如,循环 2n次、5n+1 次等,都可以简化记为 n次,因为 n 前面的系数对时间复杂度没有影响。
- 循环嵌套时使用乘法。总操作数量等于外层循环和内层循环操作数量之积,每一层循环依然可以分别套用第
1.点和第2.点的技巧。
给定一个函数,我们可以用上述技巧来统计操作数量。
void algorithm(int n) {
int a = 1; // +0(技巧 1)
a = a + n; // +0(技巧 1)
// +n(技巧 2)
for (int i = 0; i < 5 * n + 1; i++) {
printf("%d", 0);
}
// +n*n(技巧 3)
for (int i = 0; i < 2 * n; i++) {
for (int j = 0; j < n + 1; j++) {
printf("%d", 0);
}
}
}
2. 第二步:判断渐近上界
时间复杂度由多项式 T(n) 中最高阶的项来决定。这是因为在 n 趋于无穷大时,最高阶的项将发挥主导作用,其他项的影响都可以被忽略。
表 2-2 展示了一些例子,其中一些夸张的值是为了强调“系数无法撼动阶数”这一结论。当 n 趋于无穷大时,这些常数变得无足轻重。
表 2-2 不同操作数量对应的时间复杂度
| 操作数量 | 时间复杂度 |
|---|---|
| 100000 | O(1) |
| 3n+2 | O(n) |
| 2n2+3n+2 | O(n2) |
| n3+10000n2 | O(n3) |
| 2n+10000n10000 | n(2n) |
3.4 常见类型
设输入数据大小为 n ,常见的时间复杂度类型如图 2-9 所示(按照从低到高的顺序排列)。
常数阶<对数阶<线性阶<线性对数阶<平方阶<指数阶<阶乘阶
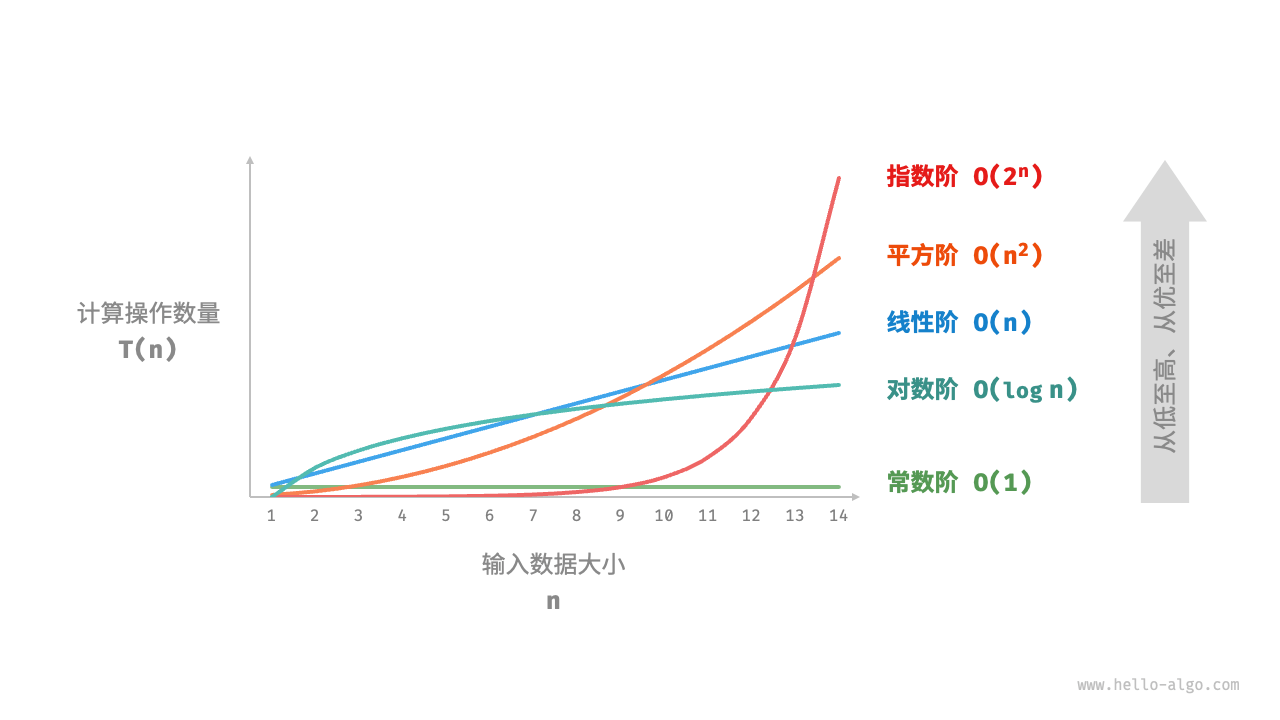
图 2-9 常见的时间复杂度类型
1. 常数阶 O(1)
常数阶的操作数量与输入数据大小 n 无关,即不随着 n 的变化而变化。
在以下函数中,尽管操作数量 size 可能很大,但由于其与输入数据大小 n无关,因此时间复杂度仍为 O(1) :
/* 常数阶 */
int constant(int n) {
int count = 0;
int size = 100000;
int i = 0;
for (int i = 0; i < size; i++) {
count++;
}
return count;
}
2. 线性阶 O(n)
线性阶的操作数量相对于输入数据大小 n 以线性级别增长。线性阶通常出现在单层循环中:
/* 线性阶 */
int linear(int n) {
int count = 0;
for (int i = 0; i < n; i++) {
count++;
}
return count;
}
遍历数组和遍历链表等操作的时间复杂度均为 O(n) ,其中 n 为数组或链表的长度:
/* 线性阶(遍历数组) */
int arrayTraversal(int *nums, int n) {
int count = 0;
// 循环次数与数组长度成正比
for (int i = 0; i < n; i++) {
count++;
}
return count;
}
值得注意的是,输入数据大小 n 需根据输入数据的类型来具体确定。
3. 平方阶 O(n2)
平方阶的操作数量相对于输入数据大小 n以平方级别增长。平方阶通常出现在嵌套循环中,外层循环和内层循环都为 O(n) ,因此总体为 O(n2) :
/* 平方阶 */
int quadratic(int n) {
int count = 0;
// 循环次数与数组长度成平方关系
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
count++;
}
}
return count;
}
图 2-10 对比了常数阶、线性阶和平方阶三种时间复杂度。
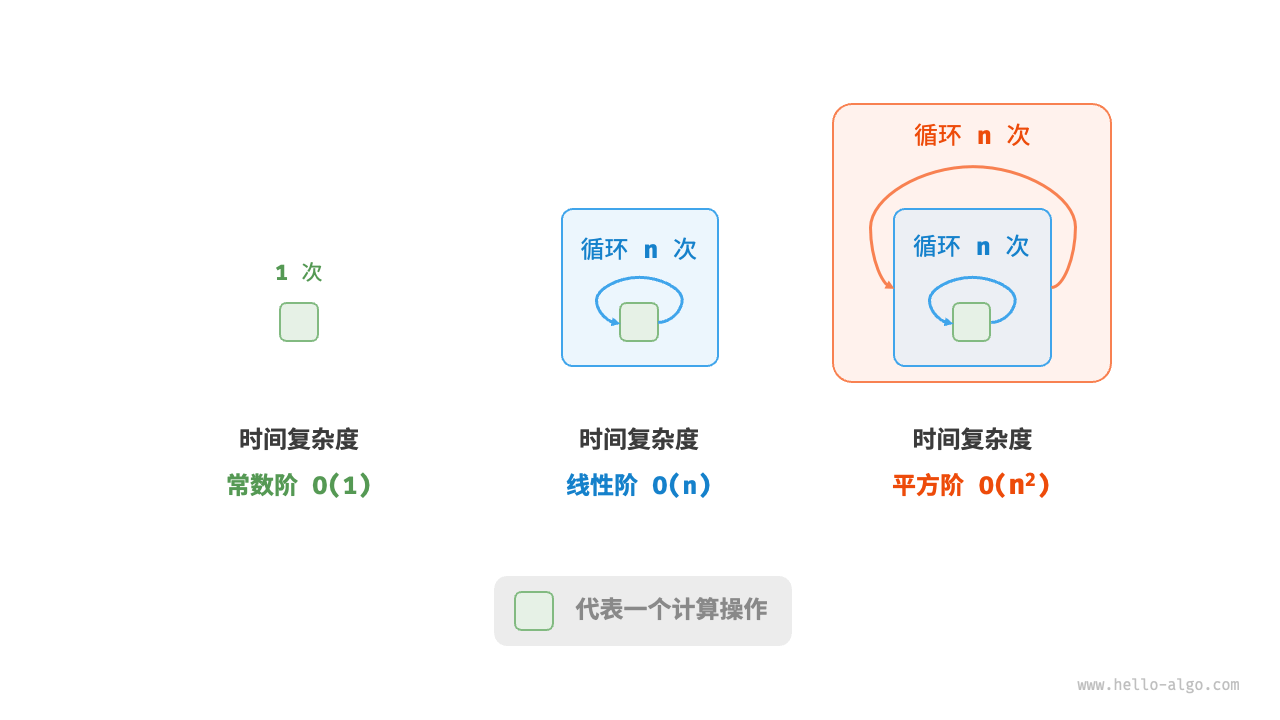
图 2-10 常数阶、线性阶和平方阶的时间复杂度
以冒泡排序为例,外层循环执行 n−1 次,内层循环执行 n−1、n−2、…、2、1 次,平均为 n/2 次,因此时间复杂度为 n((n−1)n/2)=O(n2) 。
/* 平方阶(冒泡排序) */
int bubbleSort(int *nums, int n) {
int count = 0; // 计数器
// 外循环:未排序区间为 [0, i]
for (int i = n - 1; i > 0; i--) {
// 内循环:将未排序区间 [0, i] 中的最大元素交换至该区间的最右端
for (int j = 0; j < i; j++) {
if (nums[j] > nums[j + 1]) {
// 交换 nums[j] 与 nums[j + 1]
int tmp = nums[j];
nums[j] = nums[j + 1];
nums[j + 1] = tmp;
count += 3; // 元素交换包含 3 个单元操作
}
}
}
return count;
}
4. 指数阶 O(2n)
生物学的“细胞分裂”是指数阶增长的典型例子:初始状态为 1 个细胞,分裂一轮后变为 2 个,分裂两轮后变为 4 个,以此类推,分裂 n 轮后有 2n 个细胞。
图 2-11 和以下代码模拟了细胞分裂的过程,时间复杂度为 O(2n) 。
/* 指数阶(循环实现) */
int exponential(int n) {
int count = 0;
int bas = 1;
// 细胞每轮一分为二,形成数列 1, 2, 4, 8, ..., 2^(n-1)
for (int i = 0; i < n; i++) {
for (int j = 0; j < bas; j++) {
count++;
}
bas *= 2;
}
// count = 1 + 2 + 4 + 8 + .. + 2^(n-1) = 2^n - 1
return count;
}
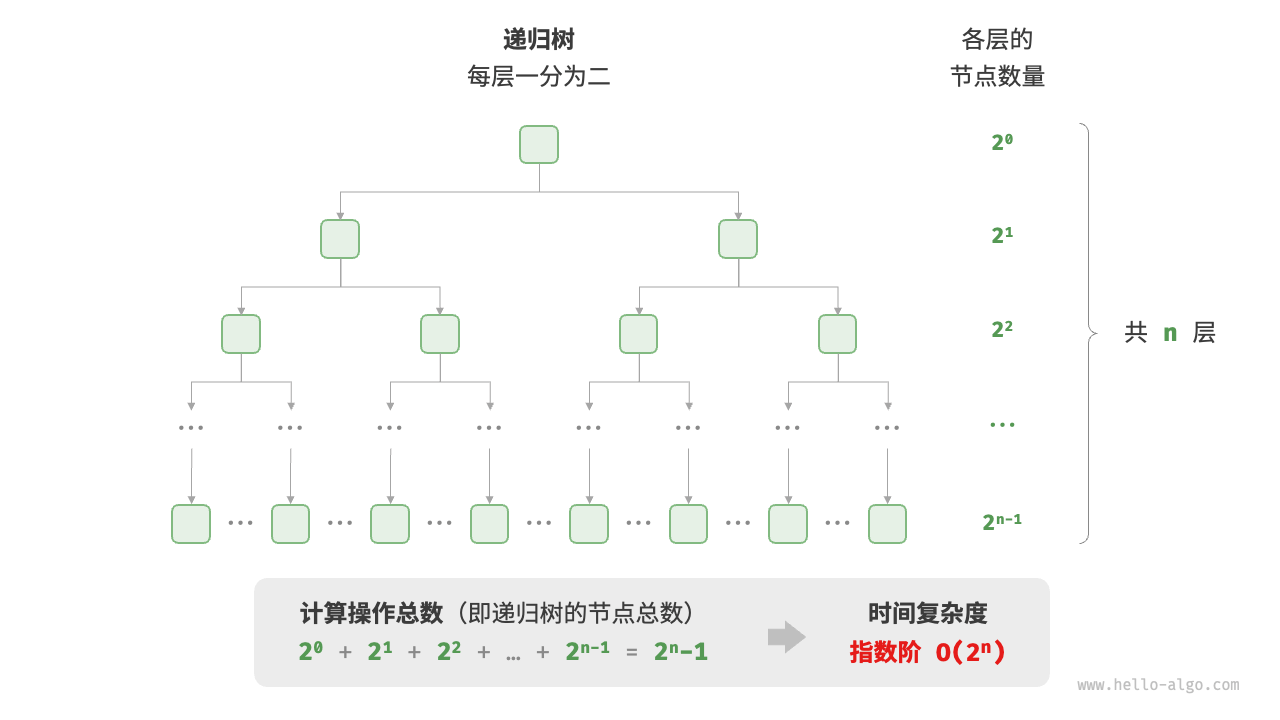
图 2-11 指数阶的时间复杂度
在实际算法中,指数阶常出现于递归函数中。例如在以下代码中,其递归地一分为二,经过 n 次分裂后停止:
/* 指数阶(递归实现) */
int expRecur(int n) {
if (n == 1)
return 1;
return expRecur(n - 1) + expRecur(n - 1) + 1;
}
指数阶增长非常迅速,在穷举法(暴力搜索、回溯等)中比较常见。对于数据规模较大的问题,指数阶是不可接受的,通常需要使用动态规划或贪心等算法来解决。
5. 对数阶 O(logn)
与指数阶相反,对数阶反映了“每轮缩减到一半”的情况。设输入数据大小为 � ,由于每轮缩减到一半,因此循环次数是 log2n ,即 2n 的反函数。
图 2-12 和以下代码模拟了“每轮缩减到一半”的过程,时间复杂度为 O(log2n) ,简记为 O(logn) 。
/* 对数阶(循环实现) */
int logarithmic(float n) {
int count = 0;
while (n > 1) {
n = n / 2;
count++;
}
return count;
}
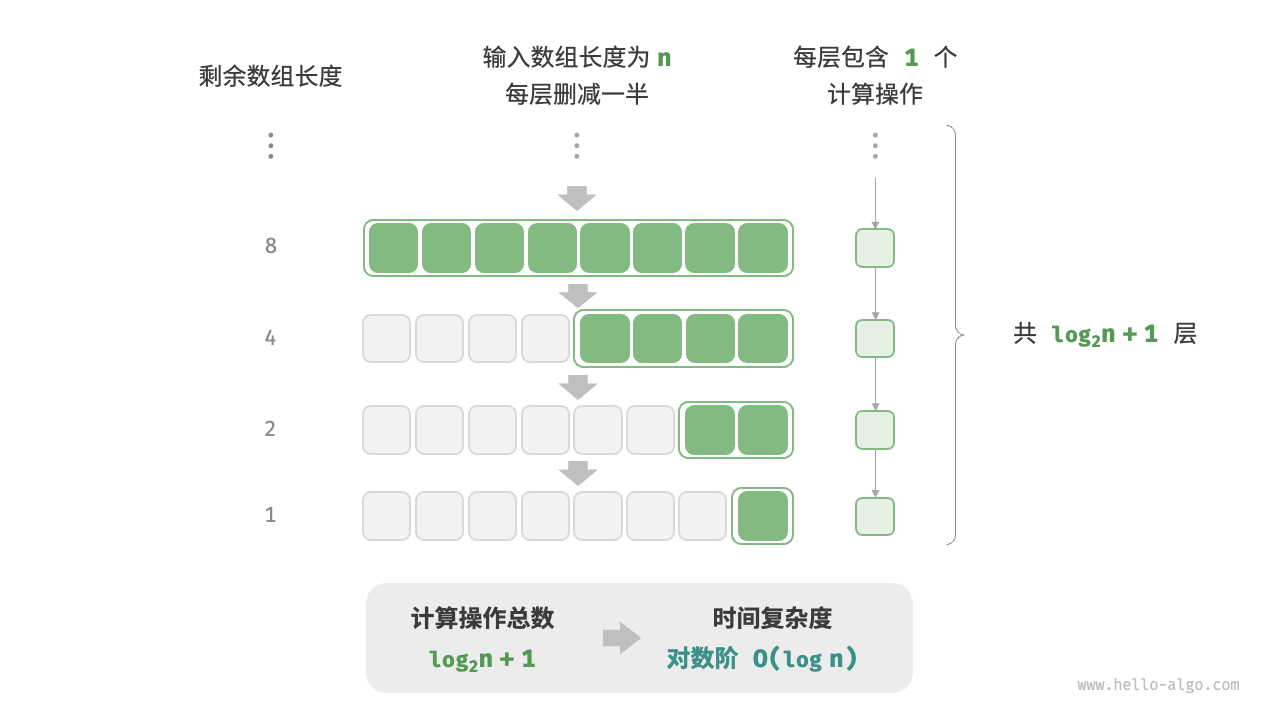
图 2-12 对数阶的时间复杂度
与指数阶类似,对数阶也常出现于递归函数中。以下代码形成了一个高度为 log2n 的递归树:
/* 对数阶(递归实现) */
int logRecur(float n) {
if (n <= 1)
return 0;
return logRecur(n / 2) + 1;
}
对数阶常出现于基于分治策略的算法中,体现了“一分为多”和“化繁为简”的算法思想。它增长缓慢,是仅次于常数阶的理想的时间复杂度。
6. 线性对数阶 O(nlogn)
线性对数阶常出现于嵌套循环中,两层循环的时间复杂度分别为 O(logn) 和 O(n) 。相关代码如下:
/* 线性对数阶 */
int linearLogRecur(float n) {
if (n <= 1)
return 1;
int count = linearLogRecur(n / 2) + linearLogRecur(n / 2);
for (int i = 0; i < n; i++) {
count++;
}
return count;
}
图 2-13 展示了线性对数阶的生成方式。二叉树的每一层的操作总数都为 n ,树共有 log2n+1 层,因此时间复杂度为 O(nlogn) 。
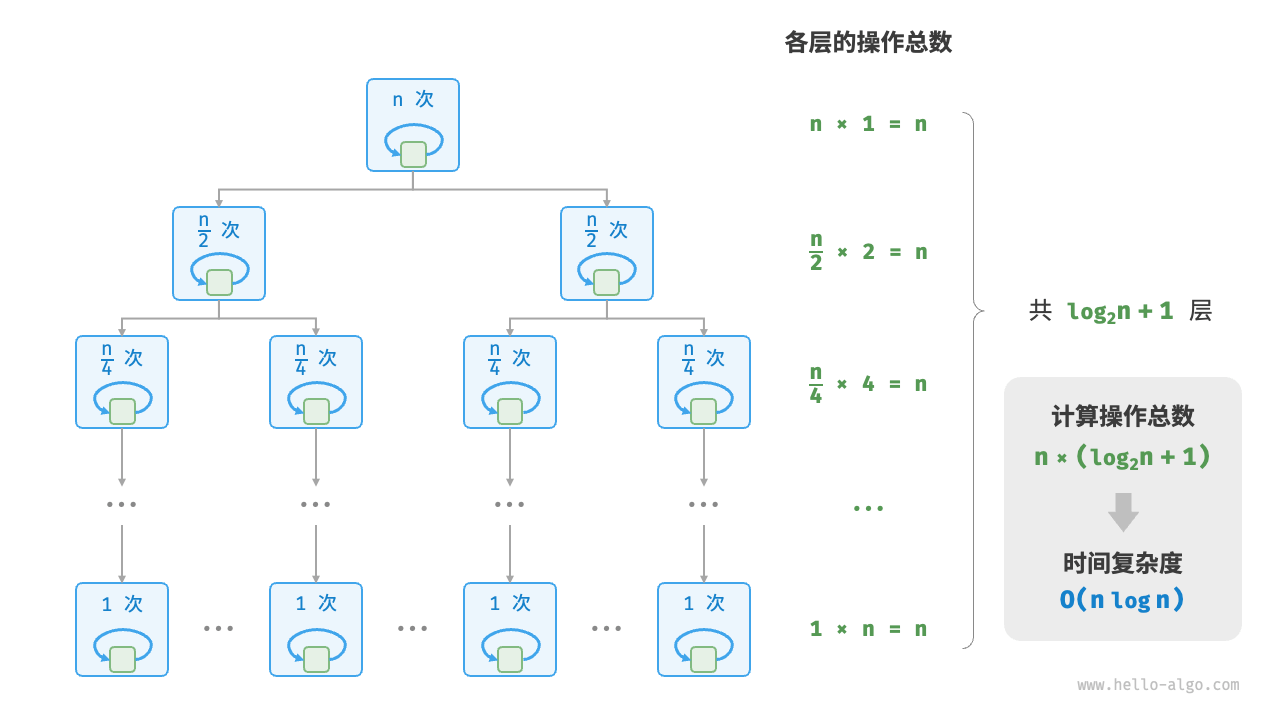
图 2-13 线性对数阶的时间复杂度
主流排序算法的时间复杂度通常为 O(nlogn) ,例如快速排序、归并排序、堆排序等。
7. 阶乘阶 O(n!)
阶乘阶对应数学上的“全排列”问题。给定 n 个互不重复的元素,求其所有可能的排列方案,方案数量
阶乘通常使用递归实现。如图 2-14 和以下代码所示,第一层分裂出 n 个,第二层分裂出 n−1 个,以此类推,直至第 n 层时停止分裂:
/* 阶乘阶(递归实现) */
int factorialRecur(int n) {
if (n == 0)
return 1;
int count = 0;
for (int i = 0; i < n; i++) {
count += factorialRecur(n - 1);
}
return count;
}
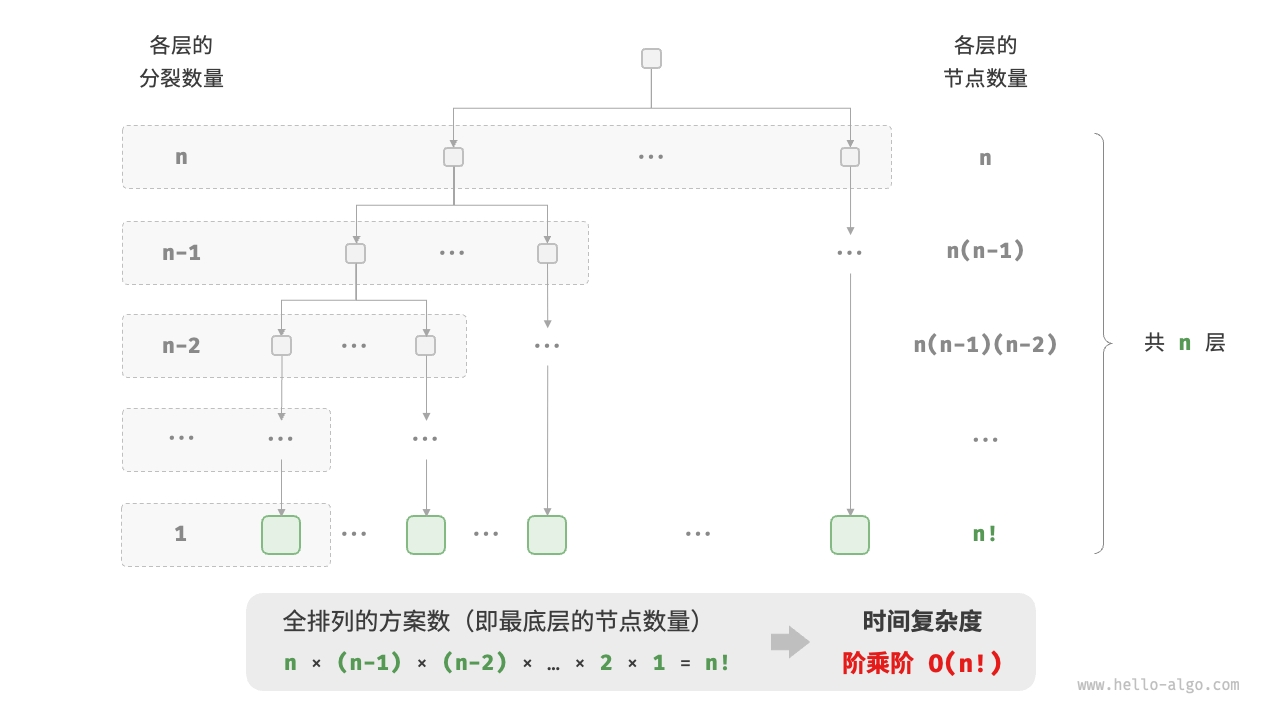
图 2-14 阶乘阶的时间复杂度
请注意,因为当 n≥4 时恒有 n!>2n ,所以阶乘阶比指数阶增长得更快,在 n 较大时也是不可接受的。
3.5 最差、最佳、平均时间复杂度
算法的时间效率往往不是固定的,而是与输入数据的分布有关。假设输入一个长度为 � 的数组 nums ,其中 nums 由从 1 至 n 的数字组成,每个数字只出现一次;但元素顺序是随机打乱的,任务目标是返回元素 1 的索引。我们可以得出以下结论。
- 当
nums = [?, ?, ..., 1],即当末尾元素是 1 时,需要完整遍历数组,达到最差时间复杂度 O(n) 。 - 当
nums = [1, ?, ?, ...],即当首个元素为 1 时,无论数组多长都不需要继续遍历,达到最佳时间复杂度 Ω(1) 。
“最差时间复杂度”对应函数渐近上界,使用大 O 记号表示。相应地,“最佳时间复杂度”对应函数渐近下界,用 Ω 记号表示:
/* 生成一个数组,元素为 { 1, 2, ..., n },顺序被打乱 */
int *randomNumbers(int n) {
// 分配堆区内存(创建一维可变长数组:数组中元素数量为 n ,元素类型为 int )
int *nums = (int *)malloc(n * sizeof(int));
// 生成数组 nums = { 1, 2, 3, ..., n }
for (int i = 0; i < n; i++) {
nums[i] = i + 1;
}
// 随机打乱数组元素
for (int i = n - 1; i > 0; i--) {
int j = rand() % (i + 1);
int temp = nums[i];
nums[i] = nums[j];
nums[j] = temp;
}
return nums;
}
/* 查找数组 nums 中数字 1 所在索引 */
int findOne(int *nums, int n) {
for (int i = 0; i < n; i++) {
// 当元素 1 在数组头部时,达到最佳时间复杂度 O(1)
// 当元素 1 在数组尾部时,达到最差时间复杂度 O(n)
if (nums[i] == 1)
return i;
}
return -1;
}
值得说明的是,我们在实际中很少使用最佳时间复杂度,因为通常只有在很小概率下才能达到,可能会带来一定的误导性。而最差时间复杂度更为实用,因为它给出了一个效率安全值,让我们可以放心地使用算法。
从上述示例可以看出,最差或最佳时间复杂度只出现于“特殊的数据分布”,这些情况的出现概率可能很小,并不能真实地反映算法运行效率。相比之下,平均时间复杂度可以体现算法在随机输入数据下的运行效率,用 Θ 记号来表示。
对于部分算法,我们可以简单地推算出随机数据分布下的平均情况。比如上述示例,由于输入数组是被打乱的,因此元素 1 出现在任意索引的概率都是相等的,那么算法的平均循环次数就是数组长度的一半 n/2 ,平均时间复杂度为 Θ(n/2)=Θ(n) 。
但对于较为复杂的算法,计算平均时间复杂度往往是比较困难的,因为很难分析出在数据分布下的整体数学期望。在这种情况下,我们通常使用最差时间复杂度作为算法效率的评判标准。
为什么很少看到 Θ 符号?
可能由于 O符号过于朗朗上口,我们常常使用它来表示平均时间复杂度。但从严格意义上看,这种做法并不规范。在本书和其他资料中,若遇到类似“平均时间复杂度 O(n)”的表述,请将其直接理解为 Θ(n) 。
4 空间复杂度
「空间复杂度 space complexity」用于衡量算法占用内存空间随着数据量变大时的增长趋势。这个概念与时间复杂度非常类似,只需将“运行时间”替换为“占用内存空间”。
4.1 算法相关空间
算法在运行过程中使用的内存空间主要包括以下几种。
- 输入空间:用于存储算法的输入数据。
- 暂存空间:用于存储算法在运行过程中的变量、对象、函数上下文等数据。
- 输出空间:用于存储算法的输出数据。
一般情况下,空间复杂度的统计范围是“暂存空间”加上“输出空间”。
暂存空间可以进一步划分为三个部分。
- 暂存数据:用于保存算法运行过程中的各种常量、变量、对象等。
- 栈帧空间:用于保存调用函数的上下文数据。系统在每次调用函数时都会在栈顶部创建一个栈帧,函数返回后,栈帧空间会被释放。
- 指令空间:用于保存编译后的程序指令,在实际统计中通常忽略不计。
在分析一段程序的空间复杂度时,我们通常统计暂存数据、栈帧空间和输出数据三部分。
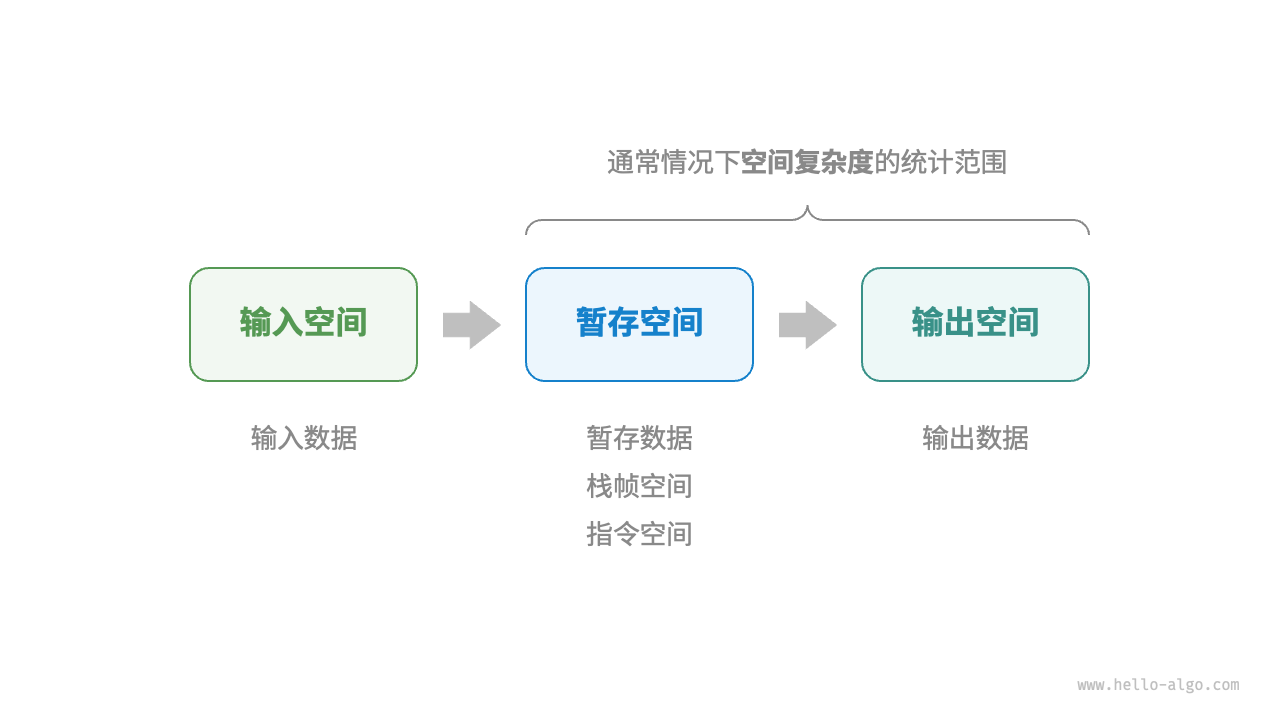
图 2-15 算法使用的相关空间
/* 函数 */
int func() {
// 执行某些操作...
return 0;
}
int algorithm(int n) { // 输入数据
const int a = 0; // 暂存数据(常量)
int b = 0; // 暂存数据(变量)
int c = func(); // 栈帧空间(调用函数)
return a + b + c; // 输出数据
}
4.2 推算方法
空间复杂度的推算方法与时间复杂度大致相同,只需将统计对象从“操作数量”转为“使用空间大小”。
而与时间复杂度不同的是,我们通常只关注最差空间复杂度。这是因为内存空间是一项硬性要求,我们必须确保在所有输入数据下都有足够的内存空间预留。
观察以下代码,最差空间复杂度中的“最差”有两层含义。
- 以最差输入数据为准:当 n<10 时,空间复杂度为 O(1) ;但当 n>10 时,初始化的数组
nums占用 O(n) 空间;因此最差空间复杂度为 O(n) 。 - 以算法运行中的峰值内存为准:例如,程序在执行最后一行之前,占用 O(1) 空间;当初始化数组
nums时,程序占用 O(n) 空间;因此最差空间复杂度为 O(n) 。
void algorithm(int n) {
int a = 0; // O(1)
int b[10000]; // O(1)
if (n > 10)
int nums[n] = {0}; // O(n)
}
在递归函数中,需要注意统计栈帧空间。例如在以下代码中:
- 函数
loop()在循环中调用了 n次function(),每轮中的function()都返回并释放了栈帧空间,因此空间复杂度仍为 O(1) 。 - 递归函数
recur()在运行过程中会同时存在 n 个未返回的recur(),从而占用 O(n) 的栈帧空间。
int func() {
// 执行某些操作
return 0;
}
/* 循环 O(1) */
void loop(int n) {
for (int i = 0; i < n; i++) {
func();
}
}
/* 递归 O(n) */
void recur(int n) {
if (n == 1) return;
return recur(n - 1);
}
4.3 常见类型
设输入数据大小为 n ,图 2-16 展示了常见的空间复杂度类型(从低到高排列)。
常数阶<对数阶<线性阶<平方阶<指数阶
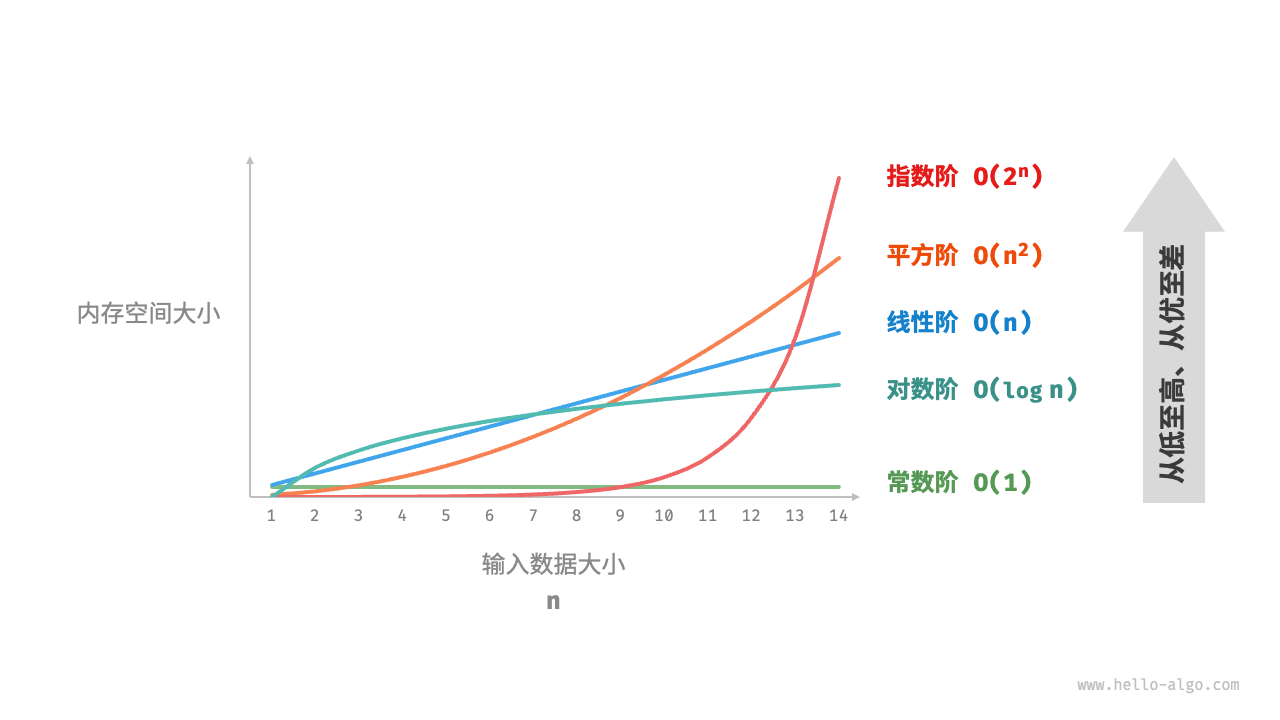
图 2-16 常见的空间复杂度类型
1. 常数阶 O(1)
常数阶常见于数量与输入数据大小 n无关的常量、变量、对象。
需要注意的是,在循环中初始化变量或调用函数而占用的内存,在进入下一循环后就会被释放,因此不会累积占用空间,空间复杂度仍为 O(1) :
/* 函数 */
int func() {
// 执行某些操作
return 0;
}
/* 常数阶 */
void constant(int n) {
// 常量、变量、对象占用 O(1) 空间
const int a = 0;
int b = 0;
int nums[1000];
ListNode *node = newListNode(0);
free(node);
// 循环中的变量占用 O(1) 空间
for (int i = 0; i < n; i++) {
int c = 0;
}
// 循环中的函数占用 O(1) 空间
for (int i = 0; i < n; i++) {
func();
}
}
2. 线性阶 O(n)
线性阶常见于元素数量与 n 成正比的数组、链表、栈、队列等:
/* 哈希表 */
struct hashTable {
int key;
int val;
UT_hash_handle hh; // 基于 uthash.h 实现
};
typedef struct hashTable hashTable;
/* 线性阶 */
void linear(int n) {
// 长度为 n 的数组占用 O(n) 空间
int *nums = malloc(sizeof(int) * n);
free(nums);
// 长度为 n 的列表占用 O(n) 空间
ListNode **nodes = malloc(sizeof(ListNode *) * n);
for (int i = 0; i < n; i++) {
nodes[i] = newListNode(i);
}
// 内存释放
for (int i = 0; i < n; i++) {
free(nodes[i]);
}
free(nodes);
// 长度为 n 的哈希表占用 O(n) 空间
hashTable *h = NULL;
for (int i = 0; i < n; i++) {
hashTable *tmp = malloc(sizeof(hashTable));
tmp->key = i;
tmp->val = i;
HASH_ADD_INT(h, key, tmp);
}
// 内存释放
hashTable *curr, *tmp;
HASH_ITER(hh, h, curr, tmp) {
HASH_DEL(h, curr);
free(curr);
}
}
如图 2-17 所示,此函数的递归深度为 n ,即同时存在 n 个未返回的 linear_recur() 函数,使用 O(n) 大小的栈帧空间:
/* 线性阶(递归实现) */
void linearRecur(int n) {
printf("递归 n = %d\r\n", n);
if (n == 1)
return;
linearRecur(n - 1);
}
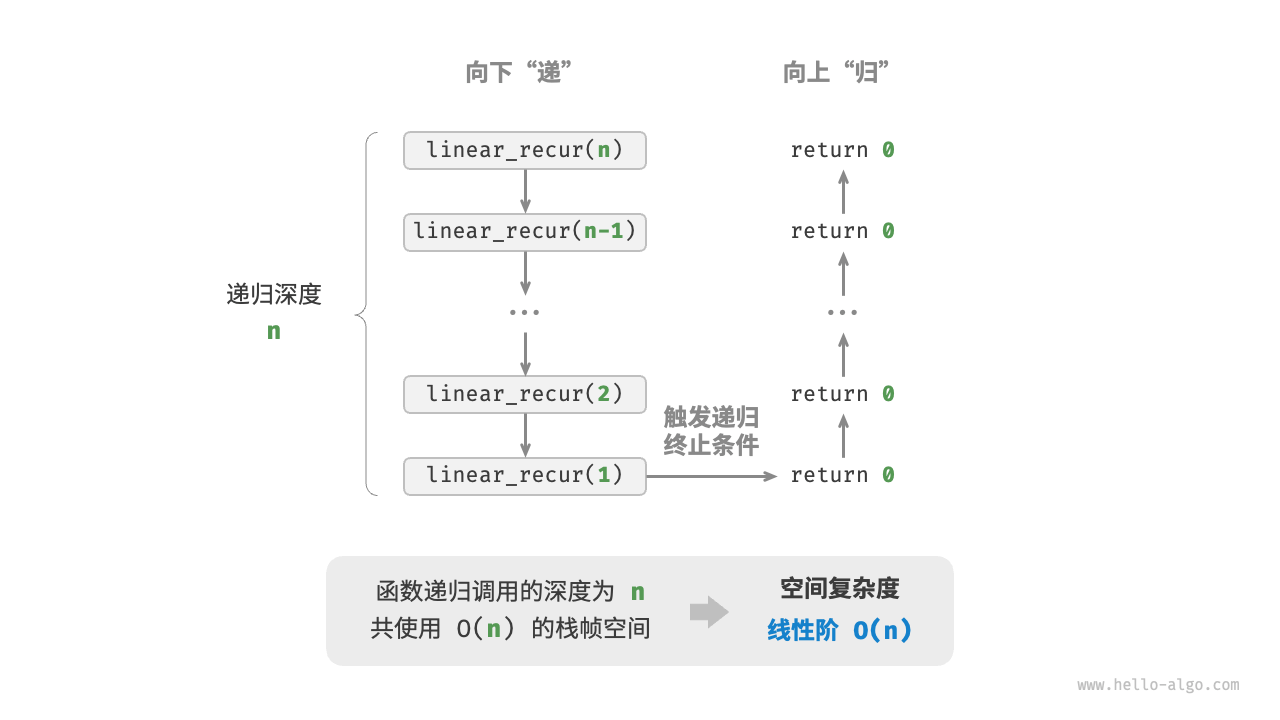
图 2-17 递归函数产生的线性阶空间复杂度
3. 平方阶 O(n2)
平方阶常见于矩阵和图,元素数量与 n 成平方关系:
/* 平方阶 */
void quadratic(int n) {
// 二维列表占用 O(n^2) 空间
int **numMatrix = malloc(sizeof(int *) * n);
for (int i = 0; i < n; i++) {
int *tmp = malloc(sizeof(int) * n);
for (int j = 0; j < n; j++) {
tmp[j] = 0;
}
numMatrix[i] = tmp;
}
// 内存释放
for (int i = 0; i < n; i++) {
free(numMatrix[i]);
}
free(numMatrix);
}
如图 2-18 所示,该函数的递归深度为 n ,在每个递归函数中都初始化了一个数组,长度分别为 n、n−1、…、2、1 ,平均长度为 n/2 ,因此总体占用 O(n2) 空间:
/* 平方阶(递归实现) */
int quadraticRecur(int n) {
if (n <= 0)
return 0;
int *nums = malloc(sizeof(int) * n);
printf("递归 n = %d 中的 nums 长度 = %d\r\n", n, n);
int res = quadraticRecur(n - 1);
free(nums);
return res;
}
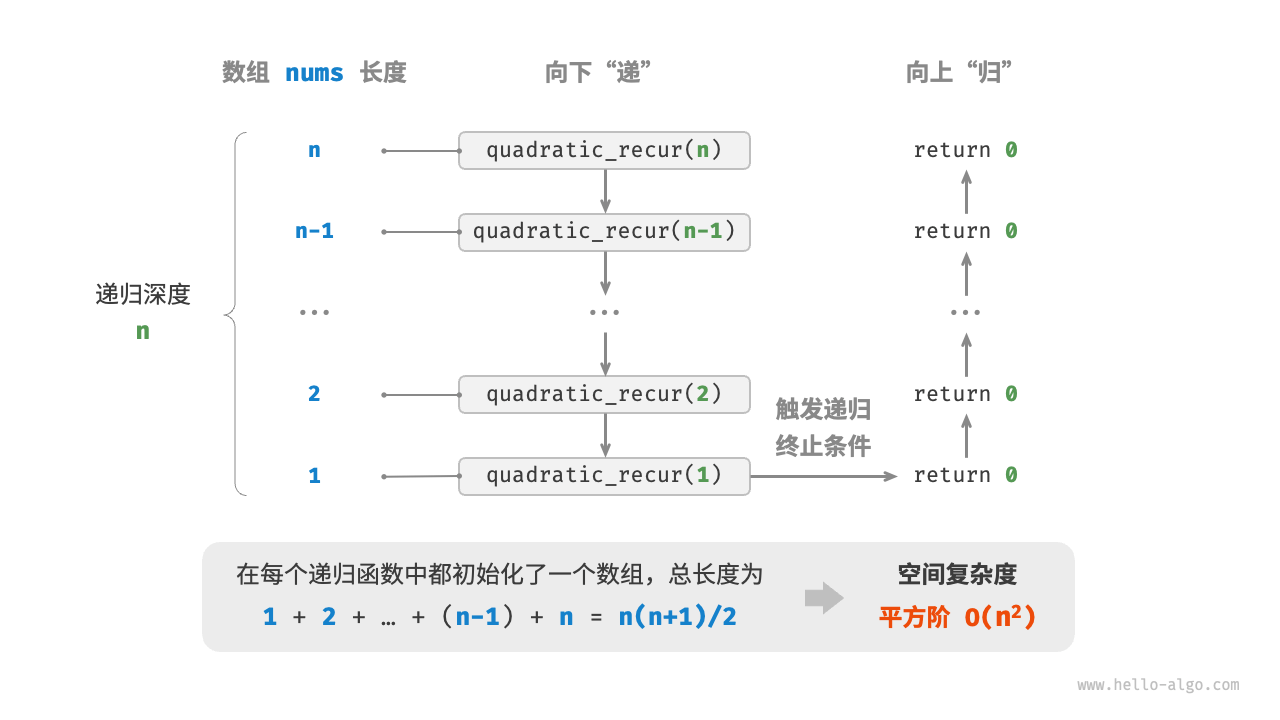
图 2-18 递归函数产生的平方阶空间复杂度
4. 指数阶 O(2n)
指数阶常见于二叉树。观察图 2-19 ,高度为 n的“满二叉树”的节点数量为 2n−1 ,占用 O(2n) 空间:
/* 指数阶(建立满二叉树) */
TreeNode *buildTree(int n) {
if (n == 0)
return NULL;
TreeNode *root = newTreeNode(0);
root->left = buildTree(n - 1);
root->right = buildTree(n - 1);
return root;
}
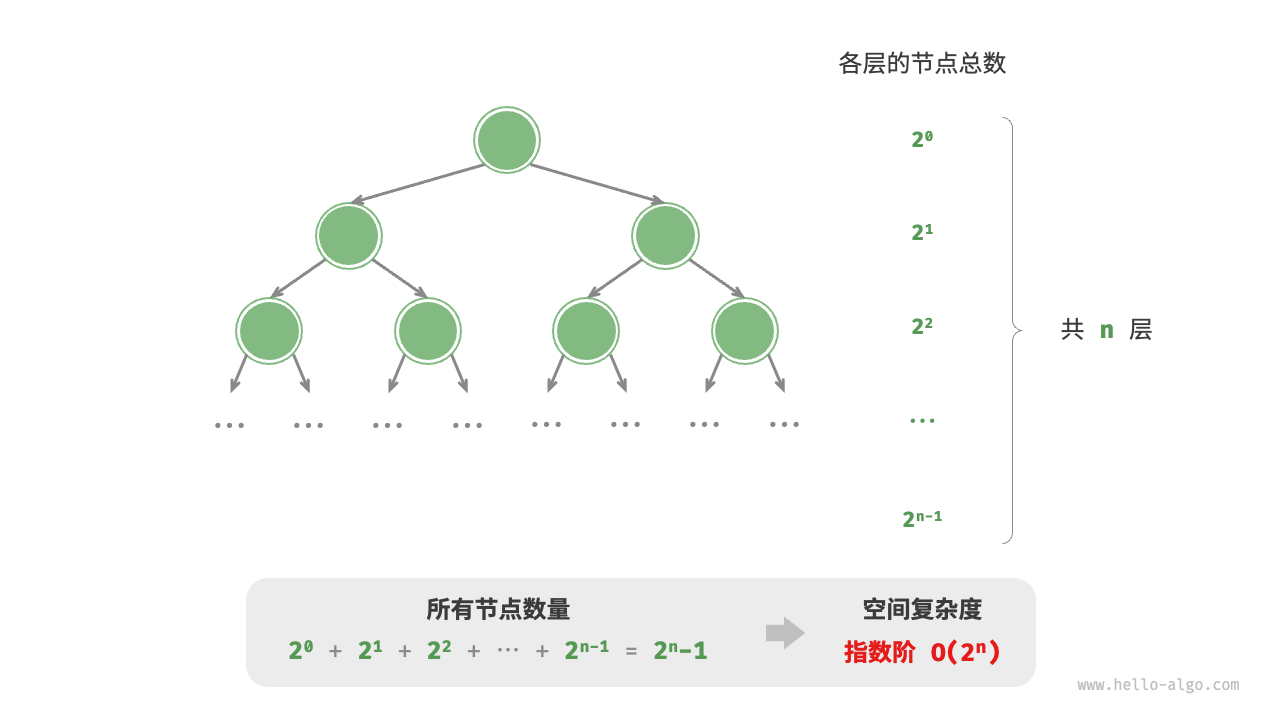
图 2-19 满二叉树产生的指数阶空间复杂度
5. 对数阶 O(logn)
对数阶常见于分治算法。例如归并排序,输入长度为 n 的数组,每轮递归将数组从中点划分为两半,形成高度为 logn 的递归树,使用 O(logn) 栈帧空间。
4.4 权衡时间与空间
理想情况下,我们希望算法的时间复杂度和空间复杂度都能达到最优。然而在实际情况中,同时优化时间复杂度和空间复杂度通常是非常困难的。
降低时间复杂度通常需要以提升空间复杂度为代价,反之亦然。我们将牺牲内存空间来提升算法运行速度的思路称为“以空间换时间”;反之,则称为“以时间换空间”。
选择哪种思路取决于我们更看重哪个方面。在大多数情况下,时间比空间更宝贵,因此“以空间换时间”通常是更常用的策略。当然,在数据量很大的情况下,控制空间复杂度也是非常重要的。
5 小结
1. 重点回顾
算法效率评估
- 时间效率和空间效率是衡量算法优劣的两个主要评价指标。
- 我们可以通过实际测试来评估算法效率,但难以消除测试环境的影响,且会耗费大量计算资源。
- 复杂度分析可以克服实际测试的弊端,分析结果适用于所有运行平台,并且能够揭示算法在不同数据规模下的效率。
时间复杂度
- 时间复杂度用于衡量算法运行时间随数据量增长的趋势,可以有效评估算法效率,但在某些情况下可能失效,如在输入的数据量较小或时间复杂度相同时,无法精确对比算法效率的优劣。
- 最差时间复杂度使用大 O 符号表示,对应函数渐近上界,反映当 n 趋向正无穷时,操作数量 T(n) 的增长级别。
- 推算时间复杂度分为两步,首先统计操作数量,然后判断渐近上界。
- 常见时间复杂度从小到大排列有 O(1)、O(logn)、O(n)、O(nlogn)、O(n2)、O(2n) 和 O(n!) 等。
- 某些算法的时间复杂度非固定,而是与输入数据的分布有关。时间复杂度分为最差、最佳、平均时间复杂度,最佳时间复杂度几乎不用,因为输入数据一般需要满足严格条件才能达到最佳情况。
- 平均时间复杂度反映算法在随机数据输入下的运行效率,最接近实际应用中的算法性能。计算平均时间复杂度需要统计输入数据分布以及综合后的数学期望。
空间复杂度
- 空间复杂度的作用类似于时间复杂度,用于衡量算法占用空间随数据量增长的趋势。
- 算法运行过程中的相关内存空间可分为输入空间、暂存空间、输出空间。通常情况下,输入空间不计入空间复杂度计算。暂存空间可分为指令空间、数据空间、栈帧空间,其中栈帧空间通常仅在递归函数中影响空间复杂度。
- 我们通常只关注最差空间复杂度,即统计算法在最差输入数据和最差运行时间点下的空间复杂度。
- 常见空间复杂度从小到大排列有 O(1)、O(logn)、O(n)、O(n2) 和 O(2n) 等。
2. Q & A
尾递归的空间复杂度是 O(1) 吗?
理论上,尾递归函数的空间复杂度可以被优化至 O(1) 。不过绝大多数编程语言(例如 Java、Python、C++、Go、C# 等)都不支持自动优化尾递归,因此通常认为空间复杂度是 O(n) 。
函数和方法这两个术语的区别是什么?
函数(function)可以被独立执行,所有参数都以显式传递。方法(method)与一个对象关联,被隐式传递给调用它的对象,能够对类的实例中包含的数据进行操作。
下面以几个常见的编程语言来说明。
- C 语言是过程式编程语言,没有面向对象的概念,所以只有函数。但我们可以通过创建结构体(struct)来模拟面向对象编程,与结构体相关联的函数就相当于其他语言中的方法。
- Java 和 C# 是面向对象的编程语言,代码块(方法)通常都是作为某个类的一部分。静态方法的行为类似于函数,因为它被绑定在类上,不能访问特定的实例变量。
- C++ 和 Python 既支持过程式编程(函数),也支持面向对象编程(方法)。
图“常见的空间复杂度类型”反映的是否是占用空间的绝对大小?
不是,该图片展示的是空间复杂度,其反映的是增长趋势,而不是占用空间的绝对大小。
假设取 n=8 ,你可能会发现每条曲线的值与函数对应不上。这是因为每条曲线都包含一个常数项,用于将取值范围压缩到一个视觉舒适的范围内。
在实际中,因为我们通常不知道每个方法的“常数项”复杂度是多少,所以一般无法仅凭复杂度来选择 n=8 之下的最优解法。但对于 n=85 就很好选了,这时增长趋势已经占主导了。