 原文连接:
原文连接:这篇论文作为第一个以纯tansformer为基础的车道线检测方法目前已被 ICRA 2023接受。
文章的贡献主要有以下几点:
- 提出了以transformer为基础的车道线检测新范式
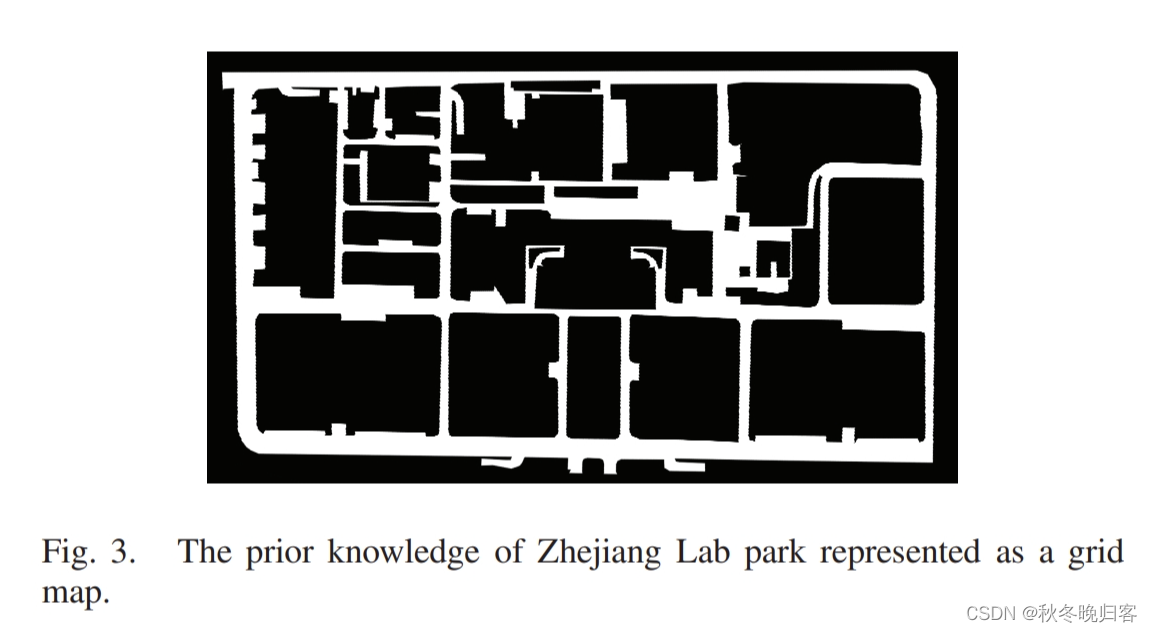
- 提出了新的车道线检测的场景数据集Zjlab
- 提出了Knowledge Embedding Alignment (KEA) module,利用了环境相关的先验知识,取得了良好结果。
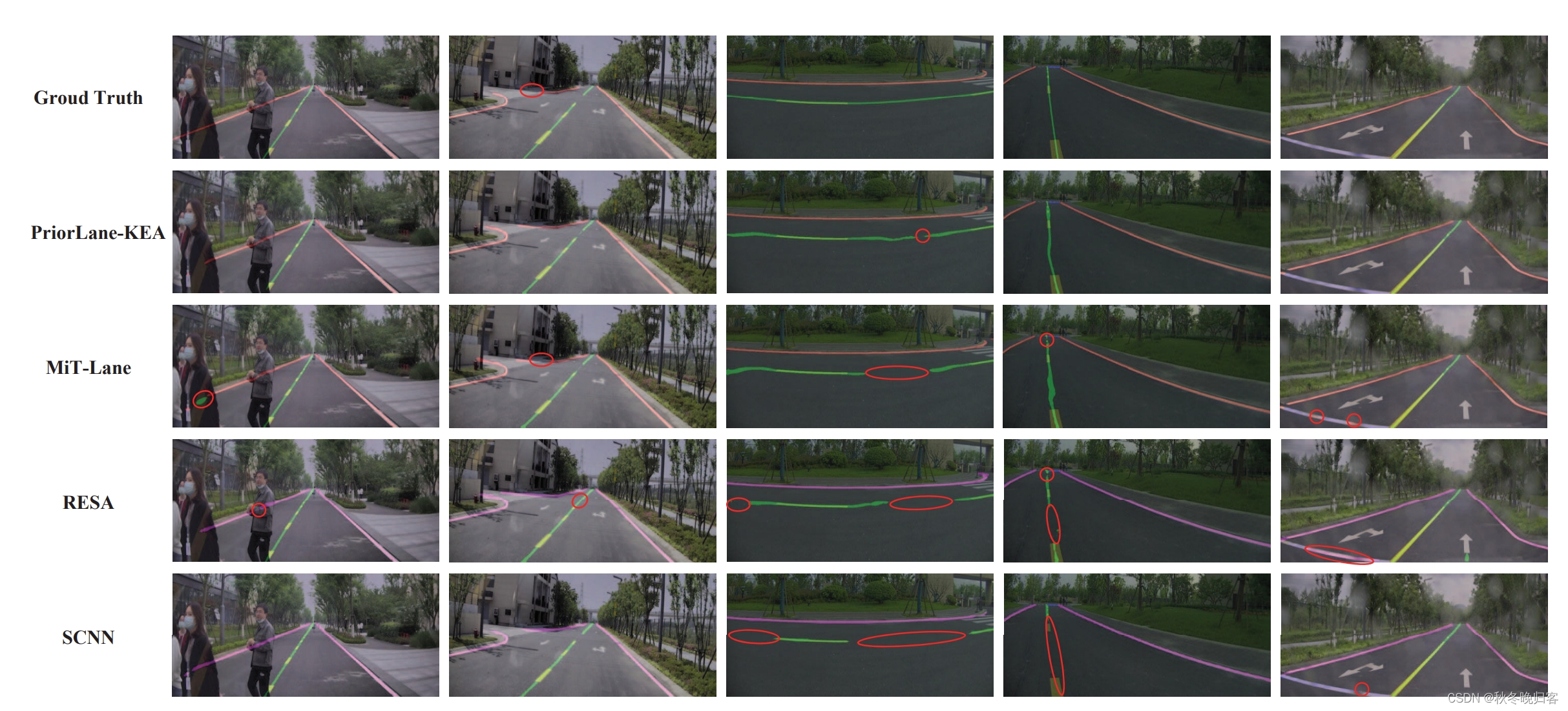
这个方法最亮眼的地方在于对于车道线的检测不在仅仅局限于普通场景下的车道线,可以实现对横向车道线以及其他特殊的类似标志进行识别检测。
一、网络整体框架

主干网络采用的Segformer的最大版本Mit block,通过堆叠block进行特征提取并且多个尺度下的特征图之后也会用到。另外值得关注的就是这个先验知识的利用(图2),它的这个主要就是针对自身提出的数据集进行检测,文中一旦给出了分辨率、感知范围和位置,就可以从“大图像”中得到子图像,称之为“先验知识”。通过特征和先验信息相加获得编码器的输入。
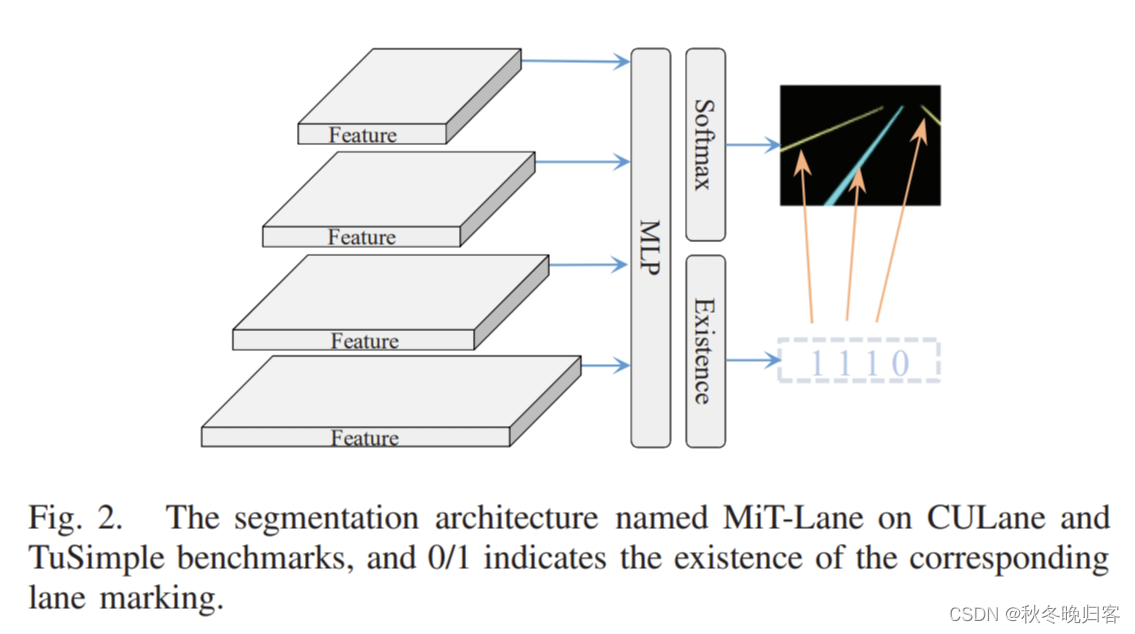
如果要检测其他车道线数据集CUlane、Tusimple等就需要利用基于这个网络略微改的MiT-lane。虽然调整比较简单,但也取得了一定的效果,证明了这个基于transformer的方法的有效性。
比较令人关注的就是这个先验知识的嵌入,作者提出了一个新的模块——Knowledge Embedding Alignment(KEA)。通过KEA模块将先验知识与特征图在空间上进行对齐,方便后续的处理。

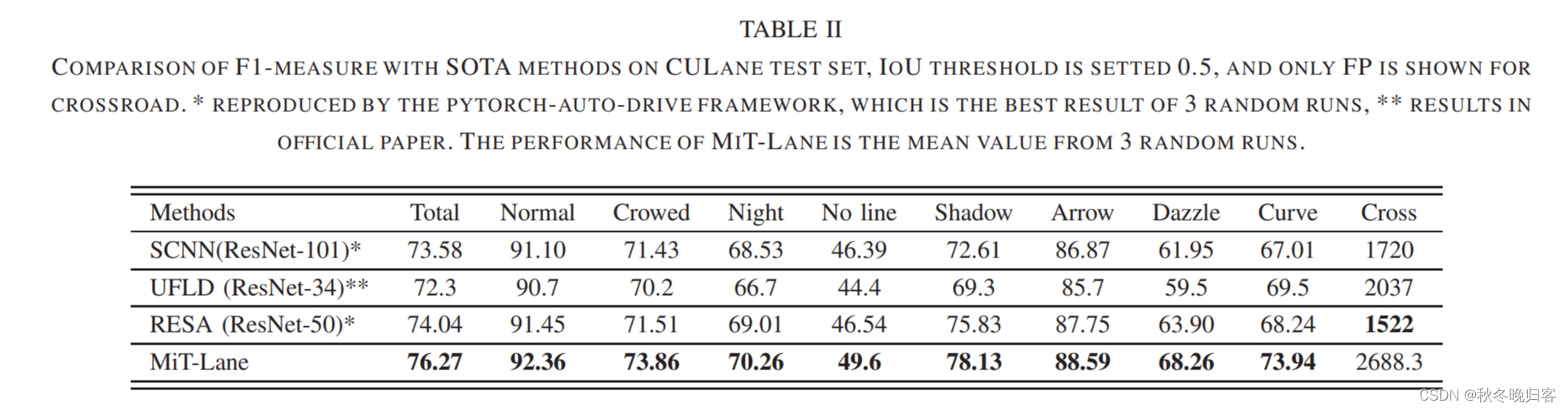
实验结果
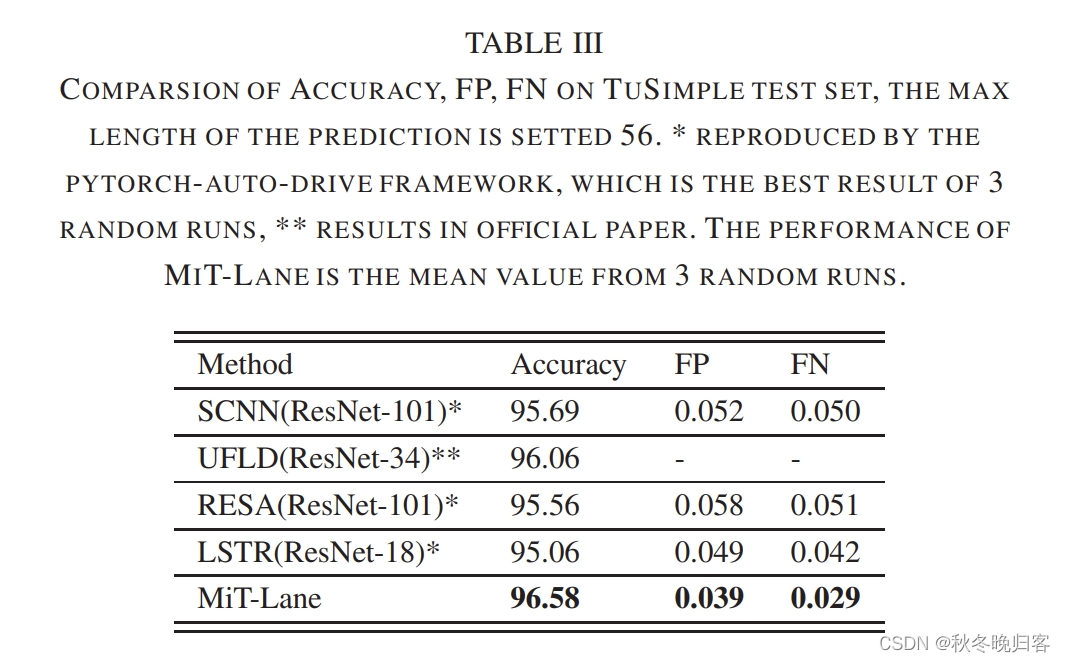
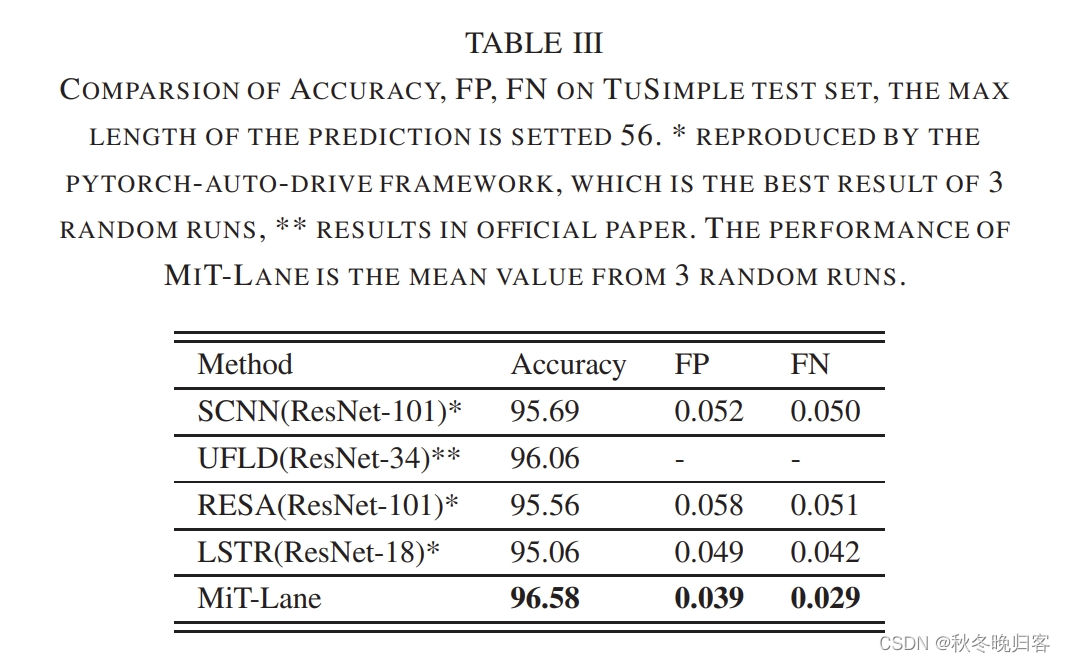
然而ZJlab数据并未公开,所以这个方法目前也就看看吧,没法玩太多