1. 深度图介绍
参考《02-深度图》
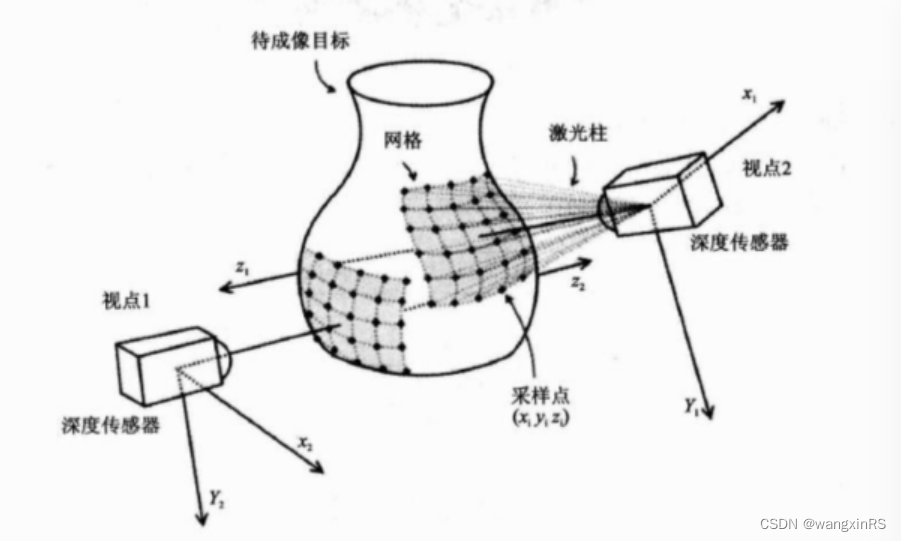
深度图像(Depth Images)也被称为距离影像(Range Image),是指将从图像采集器到场景中各点的距离值作为像素值的图像,它直接反应了景物可见表面的几何形状,利用它可以很方便的解决3D目标描述中的许多问题,深度图像经过点云变换可以计算为点云数据,有规则及有必要信息的点云数据可以反算为深度图像数据。
2. 深度图生成
参考双愚的代码和《PCL学习笔记5-range-image深度图像》
将兔子3d数据转为深度图,并展示,如下
- range_image_creation.cpp
#include <pcl/range_image/range_image.h> // //关于深度图像的头文件
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h> // //PCL可视化的头文件
#include <pcl/visualization/range_image_visualizer.h> // //深度图可视化的头文件
int main(int argc, char **argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr pointCloudPtr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ> &pointCloud = *pointCloudPtr;
// 创建一个矩形形状的点云
// Generate the data
// for (float y = -0.5f; y <= 0.5f; y += 0.01f)
// {
// for (float z = -0.5f; z <= 0.5f; z += 0.01f)
// {
// pcl::PointXYZ point;
// point.x = 2.0f - y;
// point.y = y;
// point.z = z;
// pointCloud.points.push_back(point);
// }
// }
// pointCloud.width = (uint32_t)pointCloud.points.size();
// pointCloud.height = 1;
pcl::io::loadPCDFile("bunny.pcd", pointCloud);
// pcl::io::loadPCDFile("../table_scene_lms400_downsampled.pcd", pointCloud);
//实现一个呈矩形形状的点云
// We now want to create a range image from the above point cloud, with a 1deg angular resolution 根据之前得到的点云图,通过1deg的分辨率生成深度图。
//angular_resolution为模拟的深度传感器的角度分辨率,即深度图像中一个像素对应的角度大小
float angularResolution = (float)(1.0f * (M_PI / 180.0f)); // 弧度1°
//max_angle_width为模拟的深度传感器的水平最大采样角度,
float maxAngleWidth = (float)(360.0f * (M_PI / 180.0f)); // 弧度360°
//max_angle_height为模拟传感器的垂直方向最大采样角度 都转为弧度
float maxAngleHeight = (float)(180.0f * (M_PI / 180.0f)); // 弧度180°
//传感器的采集位置
Eigen::Affine3f sensorPose = (Eigen::Affine3f)Eigen::Translation3f(0.0f, 0.0f, 0.0f);
//深度图像遵循坐标系统
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
float noiseLevel = 0.00; //noise_level获取深度图像深度时,近邻点对查询点距离值的影响水平
float minRange = 0.0f; //min_range设置最小的获取距离,小于最小获取距离的位置为传感器的盲区
int borderSize = 1; //border_size获得深度图像的边缘的宽度
boost::shared_ptr<pcl::RangeImage> range_image_ptr(new pcl::RangeImage); // 用于可视化?共享指针
pcl::RangeImage &rangeImage = *range_image_ptr;
rangeImage.createFromPointCloud(pointCloud, angularResolution, maxAngleWidth, maxAngleHeight,
sensorPose, coordinate_frame, noiseLevel, minRange, borderSize);
/*
关于range_image.createFromPointCloud()参数的解释 (涉及的角度都为弧度为单位) :
point_cloud为创建深度图像所需要的点云
angular_resolution_x深度传感器X方向的角度分辨率
angular_resolution_y深度传感器Y方向的角度分辨率
pcl::deg2rad (360.0f)深度传感器的水平最大采样角度
pcl::deg2rad (180.0f)垂直最大采样角度
scene_sensor_pose设置的模拟传感器的位姿是一个仿射变换矩阵,默认为4*4的单位矩阵变换
coordinate_frame定义按照那种坐标系统的习惯 默认为CAMERA_FRAME
noise_level 获取深度图像深度时,邻近点对查询点距离值的影响水平
min_range 设置最小的获取距离,小于最小的获取距离的位置为传感器的盲区
border_size 设置获取深度图像边缘的宽度 默认为0
*/
std::cout << rangeImage << "\n";
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
pcl::visualization::PCLVisualizer viewer("3D Viewer");
viewer.setBackgroundColor(1, 1, 1);
// 添加深度图点云
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler(range_image_ptr, 0, 0, 0);
viewer.addPointCloud(range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 4, "range image");
// 添加原始点云
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> org_image_color_handler(pointCloudPtr, 255, 100, 0);
viewer.addPointCloud(pointCloudPtr, org_image_color_handler, "orginal image");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "orginal image");
viewer.initCameraParameters();
viewer.addCoordinateSystem(1.0);
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped())
{
viewer.spinOnce();
pcl_sleep(0.01);
}
return (0);
}
- CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(cloud_viewer)
find_package(PCL 1.2 REQUIRED)
add_executable (range_image_creation range_image_creation.cpp)
target_link_libraries (range_image_creation ${PCL_LIBRARIES} pthread boost_thread)
- 结果
黑色点为深度图点云,橙色点为原始点云

3. 边界提取
下方代码目前会报错,暂时找不到原因~
- CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(cloud_viewer)
find_package(PCL 1.2 REQUIRED)
add_executable (range_image_border_extraction border_extraction.cpp)
target_link_libraries (range_image_border_extraction ${PCL_LIBRARIES} pthread boost_thread)
- border_extraction.cpp
/*
* @Description: 如何从深度图像中提取边界
http://robot.czxy.com/docs/pcl/chapter02/range_image/#_5
https://www.cnblogs.com/li-yao7758258/p/6476046.html
* @Author: HCQ
* @Company(School): UCAS
* @Email: 1756260160@qq.com
* @Date: 2020-10-21 15:57:52
* @LastEditTime: 2022-12-05 23:06:43
* @FilePath: /pcl-learning/06range-images深度图像/2从深度图中提取边界/range_image_border_extraction.cpp
*/
#include <iostream>
#include <boost/thread/thread.hpp>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/range_image_border_extractor.h> // 深度图提取便边界库
#include <pcl/console/parse.h>
typedef pcl::PointXYZ PointType;
// --------------------
// -----Parameters-----
// --------------------
float angular_resolution = 0.5f;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool setUnseenToMaxRange = false;
// --------------
// -----Help-----
// --------------
void
printUsage (const char* progName)
{
std::cout << "\n\nUsage: "<<progName<<" [options] <scene.pcd>\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r <float> angular resolution in degrees (default "<<angular_resolution<<")\n"
<< "-c <int> coordinate frame (default "<< (int)coordinate_frame<<")\n"
<< "-m Treat all unseen points to max range\n"
<< "-h this help\n"
<< "\n\n";
}
// --------------
// -----Main-----
// --------------
int
main (int argc, char** argv)
{
// --------------------------------------
// -----Parse Command Line Arguments-----
// --------------------------------------
if (pcl::console::find_argument (argc, argv, "-h") >= 0)
{
printUsage (argv[0]);
return 0;
}
if (pcl::console::find_argument (argc, argv, "-m") >= 0)
{
setUnseenToMaxRange = true;
cout << "Setting unseen values in range image to maximum range readings.\n";
}
int tmp_coordinate_frame;
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n";
}
if (pcl::console::parse (argc, argv, "-r", angular_resolution) >= 0)
cout << "Setting angular resolution to "<<angular_resolution<<"deg.\n";
angular_resolution = pcl::deg2rad (angular_resolution);
// ------------------------------------------------------------------
// -----Read pcd file or create example point cloud if not given-----
// ------------------------------------------------------------------
pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ()); //传感器的位置
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty ())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -1) //打开文件
{
cout << "Was not able to open file \""<<filename<<"\".\n";
printUsage (argv[0]);
return 0;
}
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f (point_cloud.sensor_orientation_); //仿射变换矩阵
// std::string far_ranges_filename = pcl::getFilenameWithoutExtension (filename)+"_far_ranges.pcd"; // 文件
// if (pcl::io::loadPCDFile(far_ranges_filename.c_str(), far_ranges) == -1)
// std::cout << "Far ranges file \""<<far_ranges_filename<<"\" does not exists.\n";
}
else
{
cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f) //填充一个矩形的点云
{
for (float y=-0.5f; y<=0.5f; y+=0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.points.push_back (point);
}
}
point_cloud.width = (int) point_cloud.points.size (); point_cloud.height = 1;
}
// -----------------------------------------------
// -----Create RangeImage from the PointCloud-----
// -----------------------------------------------
float noise_level = 0.0; //各种参数的设置
float min_range = 0.0f;
int border_size = 1;
boost::shared_ptr<pcl::RangeImage> range_image_ptr (new pcl::RangeImage);
pcl::RangeImage& range_image = *range_image_ptr;
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges (far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange ();
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
pcl::visualization::PCLVisualizer viewer ("3D Viewer"); //创建视口
viewer.setBackgroundColor (1, 1, 1); //设置背景颜色
viewer.addCoordinateSystem (1.0f); //设置坐标系
pcl::visualization::PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 0, 0, 0);
viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud"); //添加点云
//PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 150, 150, 150);
//viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
//viewer.setPointCloudRenderingProperties (PCL_VISUALIZER_POINT_SIZE, 2, "range image");
/*
// -------------------------
// -----Extract borders提取边界的部分-----
// -------------------------
pcl::RangeImageBorderExtractor border_extractor (&range_image);
pcl::PointCloud<pcl::BorderDescription> border_descriptions;
border_extractor.compute (border_descriptions); //提取边界计算描述子
// -------------------------------------------------------
// -----Show points in 3D viewer在3D 视口中显示点云-----
// ----------------------------------------------------
pcl::PointCloud<pcl::PointWithRange>::Ptr border_points_ptr(new pcl::PointCloud<pcl::PointWithRange>), //物体边界
veil_points_ptr(new pcl::PointCloud<pcl::PointWithRange>), //veil边界
shadow_points_ptr(new pcl::PointCloud<pcl::PointWithRange>); //阴影边界
pcl::PointCloud<pcl::PointWithRange>& border_points = *border_points_ptr,
& veil_points = * veil_points_ptr,
& shadow_points = *shadow_points_ptr;
for (int y=0; y< (int)range_image.height; ++y)
{
for (int x=0; x< (int)range_image.width; ++x)
{
if (border_descriptions.points[y*range_image.width + x].traits[pcl::BORDER_TRAIT__OBSTACLE_BORDER])
border_points.points.push_back (range_image.points[y*range_image.width + x]);
if (border_descriptions.points[y*range_image.width + x].traits[pcl::BORDER_TRAIT__VEIL_POINT])
veil_points.points.push_back (range_image.points[y*range_image.width + x]);
if (border_descriptions.points[y*range_image.width + x].traits[pcl::BORDER_TRAIT__SHADOW_BORDER])
shadow_points.points.push_back (range_image.points[y*range_image.width + x]);
}
}
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> border_points_color_handler (border_points_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointWithRange> (border_points_ptr, border_points_color_handler, "border points");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "border points");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> veil_points_color_handler (veil_points_ptr, 255, 0, 0);
viewer.addPointCloud<pcl::PointWithRange> (veil_points_ptr, veil_points_color_handler, "veil points");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "veil points");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> shadow_points_color_handler (shadow_points_ptr, 0, 255, 255);
viewer.addPointCloud<pcl::PointWithRange> (shadow_points_ptr, shadow_points_color_handler, "shadow points");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "shadow points");
//-------------------------------------
// -----Show points on range image-----
// ------------------------------------
pcl::visualization::RangeImageVisualizer* range_image_borders_widget = NULL;
range_image_borders_widget =
pcl::visualization::RangeImageVisualizer::getRangeImageBordersWidget (range_image, -std::numeric_limits<float>::infinity (), std::numeric_limits<float>::infinity (), false,
border_descriptions, "Range image with borders");
// -------------------------------------
*/
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped ())
{
//range_image_borders_widget->spinOnce ();
viewer.spinOnce ();
pcl_sleep(0.01);
}
}