在学习slam一年之后开始,开始自己理思路,全手敲完成ch13的整个代码
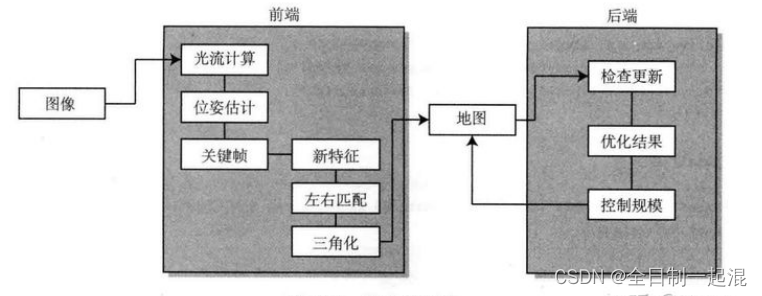
我们按照自己写系统的思路进行,首先确定好SLAM整体系统的流程,见下图,输入为双目图像,之后进入前端位姿估计和后端优化,中间维护一个由关键帧和地图点组成的地图
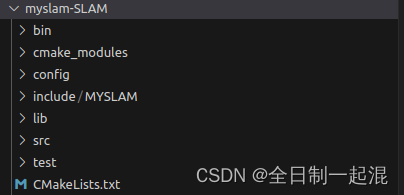
根据确定好工程框架后,确定我们的代码框架,新建以下文件夹:
1. bin 用来存放可执行的二进制;
2. include/MYSLAM 存放 slam 模块的头文件,主要是.h
3. src 存放源代码文件,主要是 cpp;
4. test 存放测试用的文件,也是 cpp;210
5. lib 存放编译好的库文件;
6. config 存放配置文件;
7. cmake_modules 第三方库的 cmake 文件,在使用 g2o 之类的库中会用到它
8. CMakeLists.txt 用于编译代码;
工程框架与代码结构确定好后,我们开始进一步抽象出一些基本的类
1.Frame(帧类):处理的最基本单元,双目视觉中即表示一对图像
2. Feature(特征点类):2D点,通过对帧提取特征点,实现后续光流追踪
3. MapPoint(地图点类):3D点,通过三角化等方式计算出2d特征点的深度,即获得其3D位置
接下来我们先抽象出这些最基本的类