文章转自 帅气的为为 https://zhuanlan.zhihu.com/p/364421182
介绍
机器人通过栅格地图进行路径规划时,根据静态障碍物得到全局路径,本阶段暂不考虑动态障碍物。通过各种路径规划算法,如 Dijkstra’s,A*,D-star,RRT等,规划出的路径都存在直线之间有急剧拐弯(曲率变化大)的问题。


尽管通过将八邻域改为更多邻域,如前文所述,能略微改善曲率变化急剧的问题,但是这样的路径仍然不适于机器人运动模型,尤其是非全向机器人,如阿克曼底盘,所以需要一条符合机器人运动限制的路径。
路径连续性
连续性包括两个部分:几何连续 ,参数连续
。
几何连续指路径的多个片段的起始点相连,而且切向量的方向相同。
参数连续指路径的多个片段的起始点相连,而且切向量的方向和大小相同。
如果两曲线在点 处的第
阶导数相等,那么该两曲线在点
处是
连续,同时也是
连续的,对于
。总之,曲线
的
阶导数
是连续的话,则是
连续曲线。


如上所述,参数连续意味着曲线和其参数化的平滑,而集合连续仅意味着机器人轨迹平滑。例如 连续意味着切向量连续,而
连续意味着斜率连续;
连续意味着加速度矢量连续,而
连续意味着曲率连续。对于机器人运动来说,
连续保持速度,
连续保持加速度。对于机器人路径规划来说,关键是路径是否
或者
连续。高阶连续如
主要处理面,用于 CAD/CAM 设计。
插值法
- 多项式插值
对于 个点
,可以用拉格朗日(Lagrange)插值
,其阶
:
,其中
。
另一种是赫米特(Hermite)插值,定义 阶的
在
处为0:
,
,其中
。
插值法用于路径平滑十分原始,有两个缺点:计算复杂度高;Runge’s 现象。
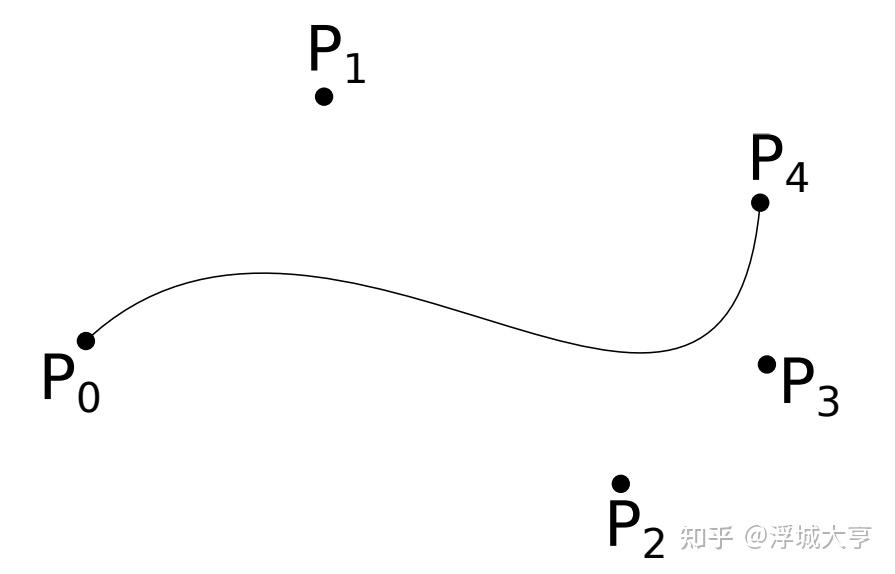
2. 贝塞尔曲线
对于 个点
,对应的贝塞尔曲线定义为:
,其中
,
。

3. 三次样条曲线
样条曲线适合于对任意方程建模,对于低阶曲线也有较好的效果,能防止 Runge’s 现象。
有两个重要特点:用最小阶数就可以产生 近似;对于小曲率也是足够平滑。
考虑 区间内有序的
个点
,以及相应的分析
,
。因为该样条曲线是3阶的,其二阶导数必须是连续的,因此定义
,
,
,于是有:
其中 ,
,并且
可以从
连续系统求得:
。
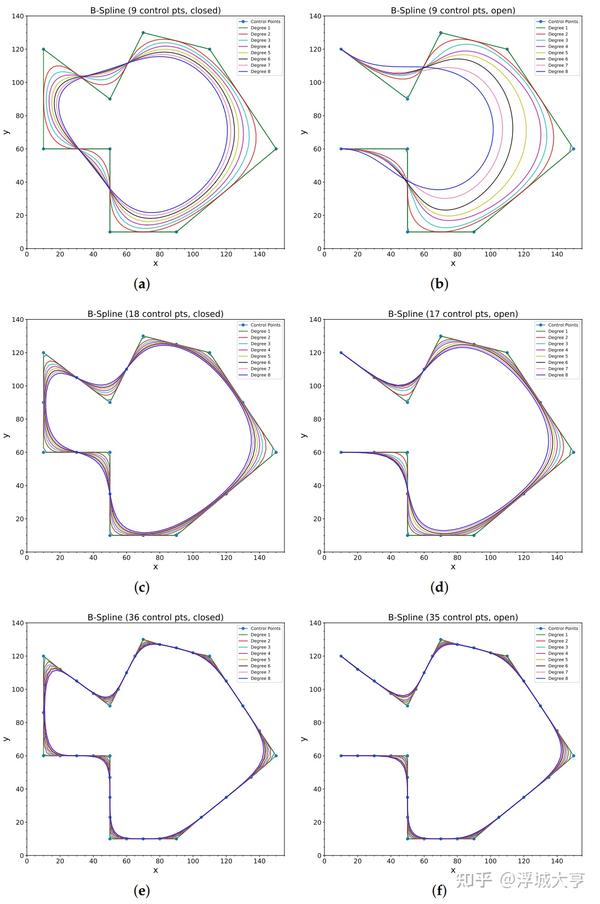
4. B样条曲线
给定 个实数
,
,
阶的 B 样条曲线:
由基本的 阶 B 样条曲线
线性组成:
其中 称为控制点,
个控制点形成一个凸包(convex hull),对于
这些基本 B 样条曲线定义为:
当控制点的个数比阶数多一个时,例如 ,
,B 样条曲线退化为贝塞尔曲线。



5. NURBS 曲线
直接给定义:
其中 是阶数,
是 B 样条曲线基本方程,
是控制点,
的权重
是齐次点
的最后一个维度。
特殊曲线
- Dubin’s 曲线
给定平面内两点和运动方向,Dubins 用圆弧和线段在给定曲率范围内找到连接各点的最短平滑路径,如图所示。


Durbin’s 曲线简单但是有效,适用于实时处理因为计算简单,可以用于回环线来满足各种不同限制。
首先介绍一个简单的车,如图所示。
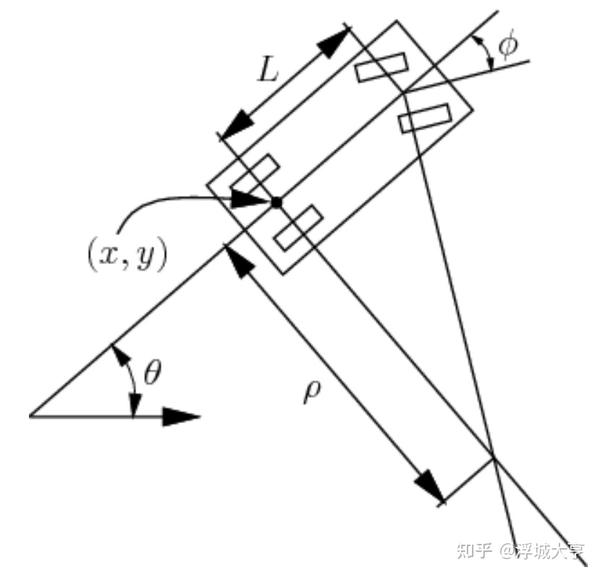
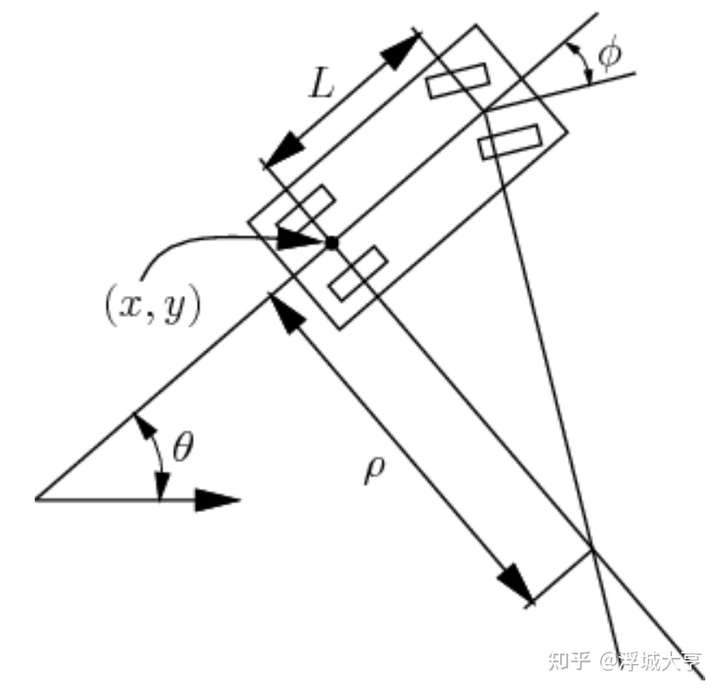
它的 C 空间 ,定义为
,车子运动方程如下:
时间间隔 极小时,车子大致走后轮指向。
趋近于0,意味着
,因为
,
,于是有:
要满足该限制,方程的解为: ,
,
为常数。
下面解关于 的方程,
为汽车转弯半径,
,因为
,有
两边同时除以 ,因为
,有
假定速度 和转向角
等同于动作参数
和
,动作向量
,汽车动力学方程为:
因为车子有最小转弯半径 ,而路径规划的任务是最小化起点到终点的车子运动曲线,如果
那么就没有曲率限制,走两点间直线距离最短,但实际上需要优化
,其中 是到达终点
的时间,如果没有到达则
。
因为速度恒定,运动方程可以简化为:
其中 属于区间
,对于
,以下结果都成立:
| Symbol | Steering: u |
|---|---|
| S | 0 |
| L | 1 |
| R | -1 |
在[1]中已经证明,在任何两个空间之间,Dubins 汽车的最短路径可以由不超过三个基本运动的组合表示,所以动作空间为 ,只有如下六个关键词是最优的:
为了更加准确,要表示每个基本动作的持续时间。对于 或
,加入下标表示转角,对于
,加入下标表示距离,因此 Dubins 曲线可以更加精确的表示为:
其中 ,
,
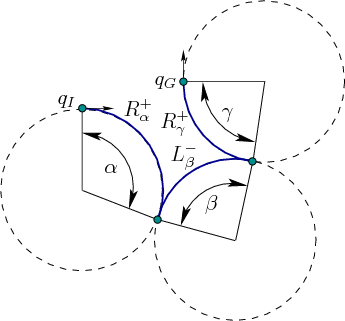
。如图所示两种可能情况。


也可以用 来代表曲线,即
或
,那么6个词可以简化为仅2个词:
更准确的版本为:
当 时,分割如下图所示:


已有了关键信息,但是对于给定的 和
,仍存在两个问题:
六个词中哪些可以生成最短路径?
对于某个词,相应下标的值 ,
,
是多少?
一个简单的方法就是穷举法,如图所示。


2. Clothoid
Clothoid,也被称为欧拉螺旋线或者 Cornu’s 螺旋线,表示在复平面:
其中 和
是菲涅尔函数,有时候也成为菲涅尔余弦积分和菲涅尔正弦积分。
当 时两个菲涅尔函数都趋近于
,所以这个曲线逐渐趋近于第一象限
,对称的来说,因为两个方程都是奇函数,这个曲线逐渐趋近于第一象限
。
Cornu’s 螺旋线的曲率和曲线距离成正比,因此车子的角加速度恒定,意味着驾驶员匀速转动方向盘即可,更加安全。
3. Hypocycloid
当一个半径 小圆在大一点的半径
大圆内滚动时,小圆上的某固定点产生:
其中 是峰点(曲线不可导的地方)的个数,
是两圆半径比即
,例子如图所示


如果在 hypocycloid 内有 个峰点,小圆半径则为
,因为小圆转
圈回到原点,也就生成
个峰点。
有一种新的方法成为 Smooth Hypocycloidal Paths(SHP),可以生成任何角度,该算法用来尽量保持直线路径,只平滑急转弯处,例子如图所示


4. Reeds-Shepp Curves
和 Dubins 相似,直接给运动方程:
其中 ,
。第一个变量
决定变速箱向前(
)或向后(
),为了简化假定
, 对于所有
都成立。
因此词袋为:
其中 表示变速箱逆向,即向前到向后,或向后到向前。


下图举例 。

下表为 Reeds and Shepp 的48种不同曲线,然而第一行的 和
可以被剔除,因此只有46种。


5. Balkcom-Mason 曲线
将动作集定义为 ,优化方程
因此可以有四个基本运动:


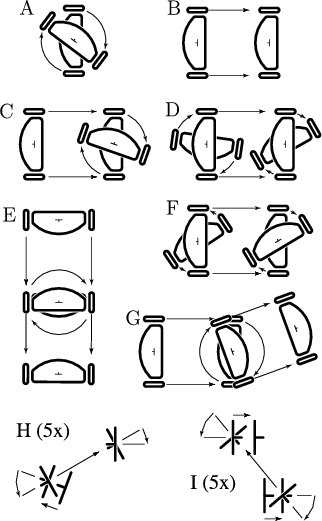
可证明得出最短路径最多由五个基本部分组成,因此有9个词即:


准确形式由下表给出:
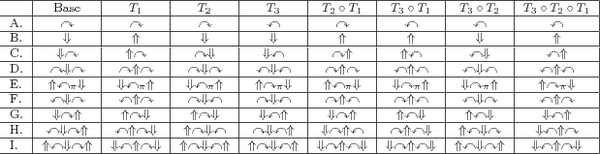

为了显示的更易懂,给出九种运动模型图:

当 ,
时,最优曲线如图所示:


[1] Dubins, L.E. (1957) On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. American Journal of Mathematics, 79, 497-516.