主要参考链接:
Turbot与python教程-实现后退
ROS机器人操作系统(rospy) 含代码介绍
rospy 让小车前进
turtlebot2 模拟 加速-匀速-减速 运动过程
ROS机器人仿真(四)- 控制一个移动基座
ROS里面的传感器
ROS探索总结(八)——键盘控制
官网:ros.org
1、多路复用器(cmd_vel_mux)包从名字就可以推测出它的用途,即进行速度的选择,这一功能有时候很有用,比如机器人在自主导航时遇到紧急情况要切换到手动控制模式,这时就要将机器人控制权从自主导航的节点切换到方向盘、手柄、键盘、急停开关等控制节点。
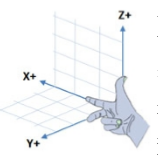
2、linear.x指向机器人前方,linear.y指向左方,linear.z垂直向上满足右手系,平面移动机器人常常linear.y和linear.z均为0
angular.z代表平面机器人的角速度,因为此时z轴为旋转轴
ROS使用的坐标系统是右手坐标系。
按照右手法则方向的旋转是正转。
linear就是指示米每秒,angular就是指示rad/s,1rad大概57度。