1. C++项目配置
当前项目部署套件使用的是OpenVINOTM,图片处理使用的是OpenCV,所以此处需要配置OpenVINOTM和OpenCV两个附加依赖项。
项目使用OpenVINOTM版本为2022.2,OpenCV版本使用的是4.5.5,具体安装方式可以参考下面三个链接:
【OpenVINO】OpenVINO 2022.1 安装教程(Windows)
【OpenVINO】OpenVINO 2022.1更新2022.2教程
2. 模型推理类 Predictor
2.1 推理结构体核心
// @brief 推理核心结构体
typedef struct openvino_core {
ov::Core core; // core对象
std::shared_ptr<ov::Model> model_ptr; // 读取模型指针
ov::CompiledModel compiled_model; // 模型加载到设备对象
ov::InferRequest infer_request; // 推理请求对象
} CoreStruct;
为了方便使用OpenVINOTM推理工具,此处将该套件较为重要的几个成员变量封装成推理核心结构体,方便模型在不同方法之间传递。
2.2 Predictor类结构
class Predictor {
public:
// 构造函数
Predictor(std::string& model_path, std::string& device_name);
// 析构函数
~Predictor() { delete p; }
// 获取节点张量
ov::Tensor get_tensor(std::string node_name);
// 填充图片数据
void fill_tensor_data_image(ov::Tensor& input_tensor, const cv::Mat& input_image);
void fill_tensor_data_image(ov::Tensor& input_tensor, const std::vector<cv::Mat> input_image);
// 模型推理
void infer();
// 获取模型输出
std::vector<float> get_output_data(std::string output_node_name);
private:
CoreStruct* p;
};
由于我们此处只进行PP-YOLOE模型的推理,所以无需构建太复杂的推理类,主要包括
- 构造函数
Predictor(model_path, device_name):主要实现功能为初始化推理核心,包括读取本地模型,将模型加载到设备,创建推理通道三个步骤; - 获取节点张量
get_tensor(node_name):主要实现功能获取指定节点的张量,主要用于获取输入节点张量; - 填充输入数据
fill_tensor_data_image(input_tensor, input_image):主要实现将带推理数据添加到模型中,支持添加单张图片数据和多通道推理下的多张图片添加; - 模型推理
infer():模型推理功能,按照读取的模型和加载的推理数据计算模型; - 读取模型输出
get_output_data(output_node_name):读取推理模型的输出。
针对上诉方法的实现可以参考源码,此处不做详细解释。
3. 图片数据处理类 ImageProcess
class ImageProcess {
public:
// 预处理图片
cv::Mat image_normalize(cv::Mat& sourse_mat, cv::Size& size);
// 处理推理结果
cv::Mat yoloe_result_process(cv::Mat& sourse_mat, std::vector<float>& vector_box, std::vector<float>& vector_conf);
// 读取lable文件
void read_class_names(std::string path_name);
// 设置缩放比例
void set_scale_factor(double scale);
private:
// 缩放比例
double scale_factor;
// lable容器
std::vector<std::string> class_names;
};
此处设置一个数据处理类主要用于处理模型的输入输出数据,主要不包括先买几个方法:
- 预处理图片
image_normalize(sourse_mat, size);:预处理图像数据,包括以下几个处理步骤:1.转换RGB 2.缩放图片 3.图片归一化; - 处理PP-YOLOE结果
yoloe_result_process(sourse_mat, vector_box, vector_conf):由于我们将模型进行了裁剪,去除了模型自带的后处理以及非极大值抑制,因此模型的输出数据较复杂,此处封装该方法主要实现将模型读取的数据按照指定要求进行处理,并绘制到结果图片上; - 读取lable文件
read_class_names(path_name):读取本地lable.txt文件; - 设置缩放比例
set_scale_factor(scale):设置原图与模型输入的缩放比例,用于回复模型预测框。
4. 模型推理实现
4.1 定义相关信息
// 模型路径
//std::string model_path = "../model/ppyoloe_plus_crn_s_80e_coco.onnx";
std::string model_path = "../model/ir/ppyoloe_plus_crn_s_80e_coco.xml";
// 设备名称
std::string device_name = "CPU";
// 输入节点
std::string input__node_name = "image";
// 输出节点名
std::string output_box_node_name = "tmp_16";
std::string output_conf_node_name = "concat_14.tmp_0";
// 测试图片
std::string image_path = "../image/demo_3.jpg";
// 类别文件
std::string lable_path = "../model/lable.txt";
首先定义相关的信息,此处推理可以使用ONNX模型和IR模型;模型输入节点为image,输出节点为:
tmp_16预测框输出节点,concat_14.tmp_0置信度输出,利用OpenVINOTM工具可以直接读取该模型节点名称,此处直接定义使用。
4.2 预处理推理数据
// 创建数据处理类
ImageProcess image_pro;
// 读取类别文件
image_pro.read_class_names(lable_path);
// 图片预处理
cv::Mat image = cv::imread(image_path);
cv::Size input_size(640, 640);
// 将图片放到方形背景中
int length = image.rows > image.cols ? image.rows : image.cols;
cv::Mat input_mat = cv::Mat::zeros(length, length, CV_8UC3);
cv::Rect roi(0, 0, image.cols, image.rows);
image.copyTo(input_mat(roi));
// 设置缩放比例
image_pro.set_scale_factor((double)length / 640.0);
// 归一化处理
cv::Mat input_data = image_pro.image_normalize(input_mat, input_size);
此处推理数据预处理主要使用类ImageProcess中定义的方法实现,PP-YOLOE模型输入为3×640×640,形状为正方形,因此此处采用将推理数据放在一个较大的正方形背景中,防止图片形状在缩放时发生变形。
4.3 模型推理
// 创建推理通道
Predictor predictor(model_path, device_name);
// 加载模型推理数据
ov::Tensor input_tensor = predictor.get_tensor(input__node_name);
predictor.fill_tensor_data_image(input_tensor, input_data);
// 模型推理
predictor.infer();
此处通过调用前面定义的Predictor类实现,初始化Predictor类,将模型读取到内存中,并加载到指定设备,创建推理通道;接下来就是加载预处理完的推理数据到模型上;最后进行模型推理。
4.4 处理推理结果
// 读取推理结果
std::vector<float> result_boxes = predictor.get_output_data(output_box_node_name);
std::vector<float> result_conf = predictor.get_output_data(output_conf_node_name);
// 处理推理结果
cv::Mat result_image = image_pro.yoloe_result_process(image, result_boxes, result_conf);
PP-TYOLOE模型经过我们裁剪后共有两个输出节点,一个负责输出预测框,一个负责输出置信值,将预测结果读取后,调用推理结果处理方法进行处理。
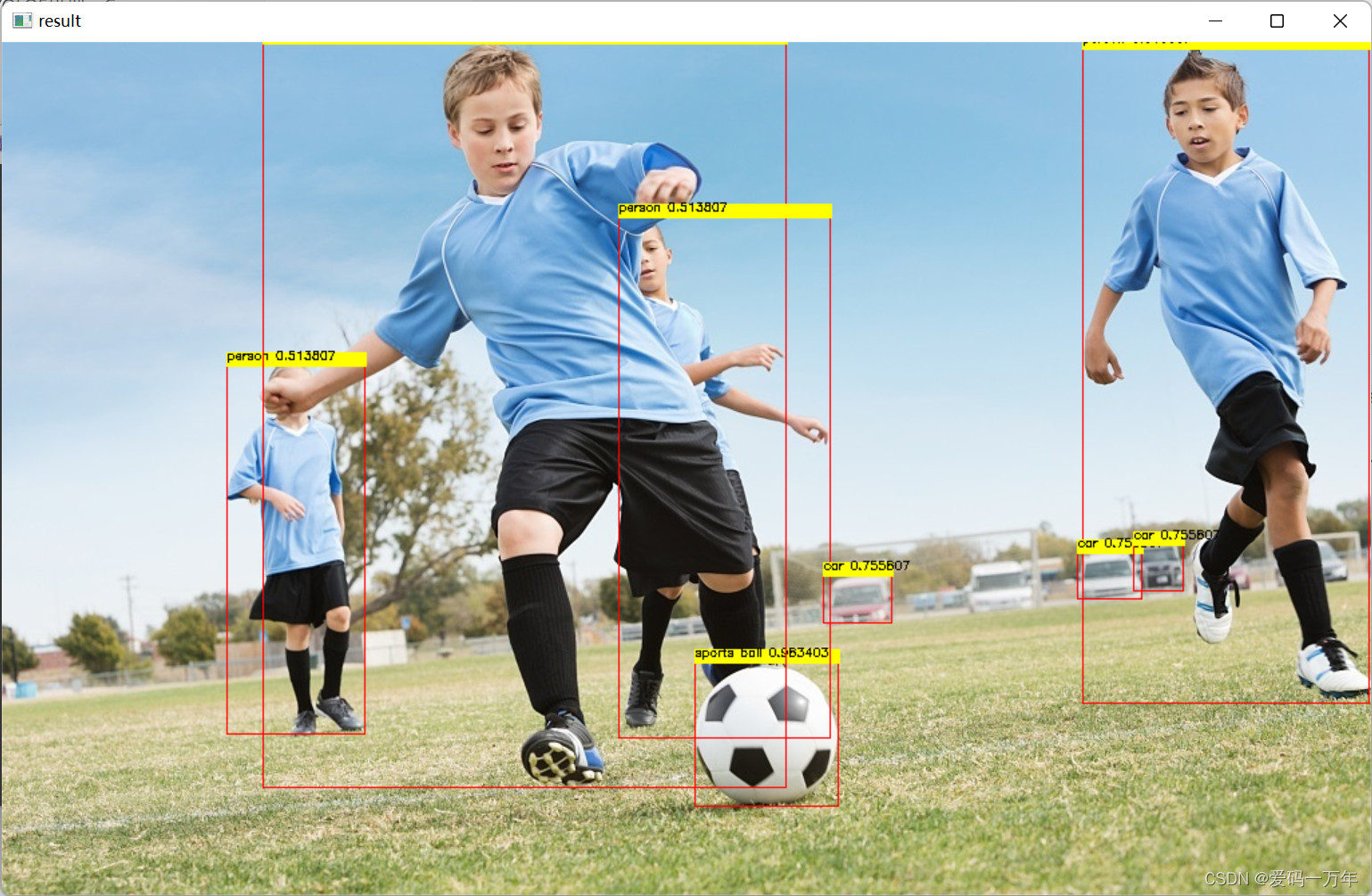
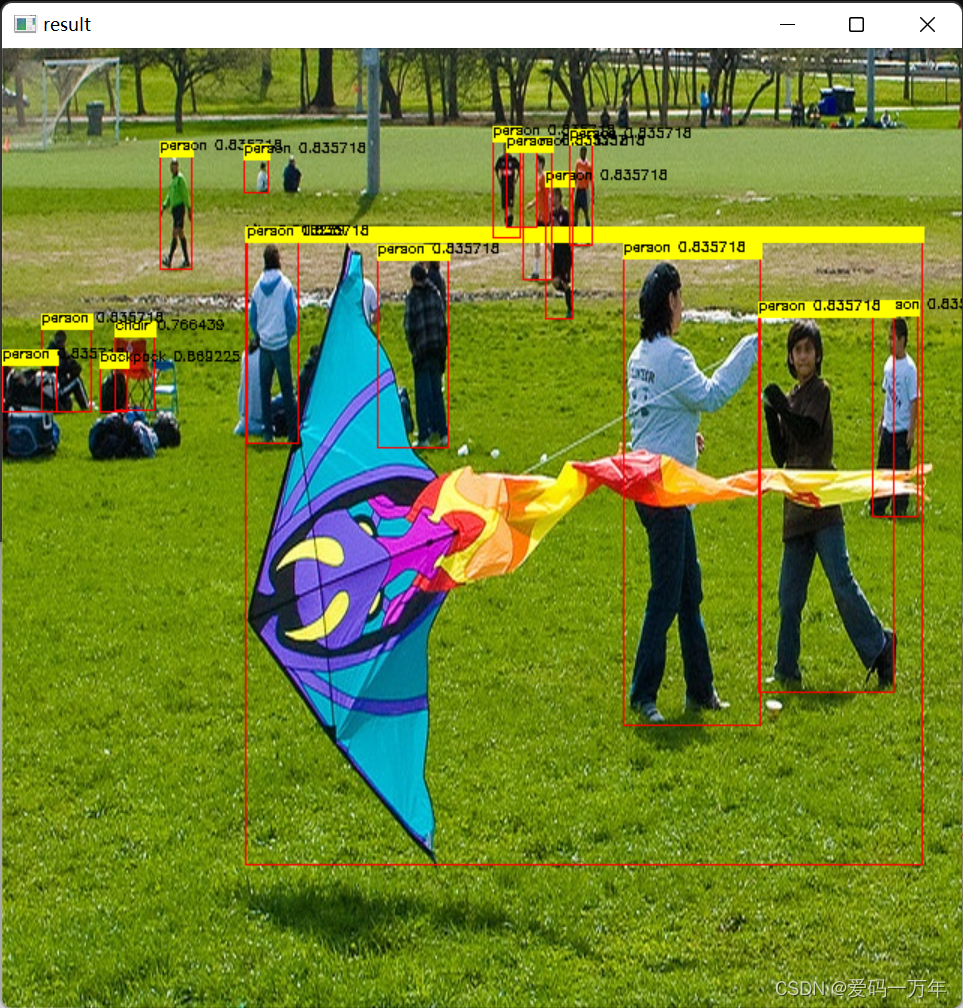
5. 模型推理效果
使用该模型,分别预测了两个图片,预测结果可以查看下面两个图。其中第二张图为飞桨测试图,可与飞桨推理套件识别结果进行对比。