论文题目:《Effective Face Landmark Localization via Single Deep Network》
- method: SDN(single deep network)
- 数据集:COFW和300-W(Helen)
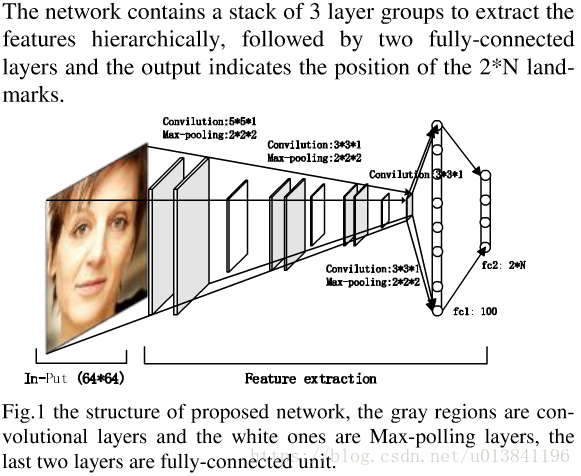
- SDN由直连堆叠的三组层构成,每组包含两个卷积层和一个最大池化层。
网络结构:
激活函数和损失函数:
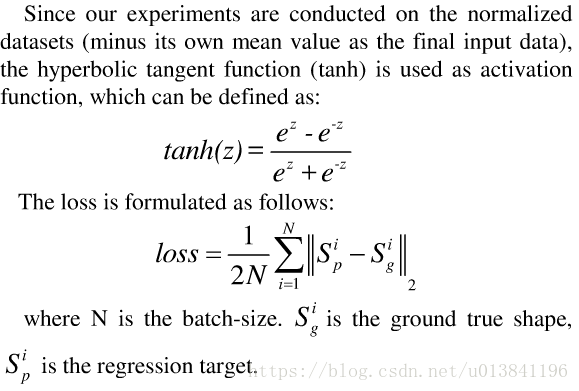
- euclidean_loss,该损失函数就是loss=(y-f(wx))^2
常用的数据增强:平移、旋转、镜像、缩放
Stage1:抖动人脸框位置加角度偏移和镜像
Stage2:对训练数据中的hard examples(errors>0.02)进行数据增强,角度变化和镜像。
fine-tune微调训练hard examples
误差的评价:
标准均方根误差(NRMSE) normalized root mean squared error (NRMSE)
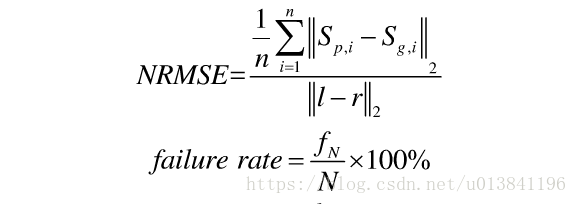
注:mean error和单个点的误差、mean error>10%(5%) as a failure.