以下教程为睿尔曼RM65-B眼在手上标定教程,在和机械臂售后交流后根据提供的相关文件进行手眼标定,总结过程如下。
一、准备工作
1.1硬件:
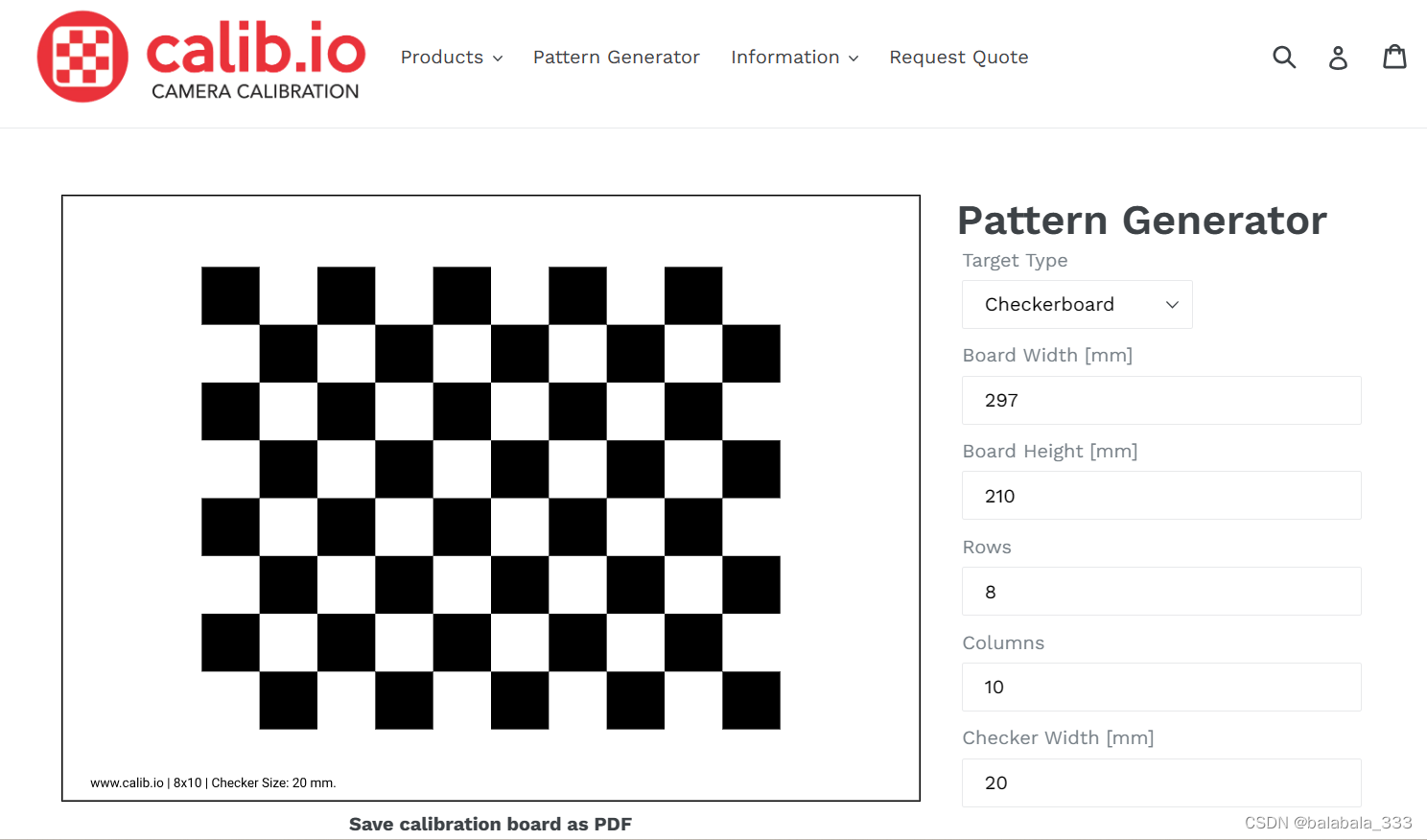
(1)准备一个棋盘标定板,需要精度高可以在网上购买,也可以自己打印放置于平面上;
(附棋盘生成网页链接标定棋盘格生成,可以自定义棋盘尺寸大小,点击下方Save可以保存pdf)
(2)睿尔曼RM65-B机械臂
(3)深度相机,本人使用L515相机
(4)工控机或电脑,本人使用系统为ubuntu18.04的工控机,该教程同时支持windows
1.2软件:
(1)python3.8及以上
(2)numpy1.24.4
(3)scipy1.10.1
(4)pyrealsense2 2.53.1.4
(2、3、4下载最新版即可)
准备好硬软件环境后,将相机固定安装在机械臂末端,相机与工控机相连,将标定板放置在固定平面上,可放置在地面上,保证标定过程中标定板位置不发生移动,且出现在相机可以到达看到的范围,布置好后启动机械臂和工控机。
二、开始标定
2.1数据采集
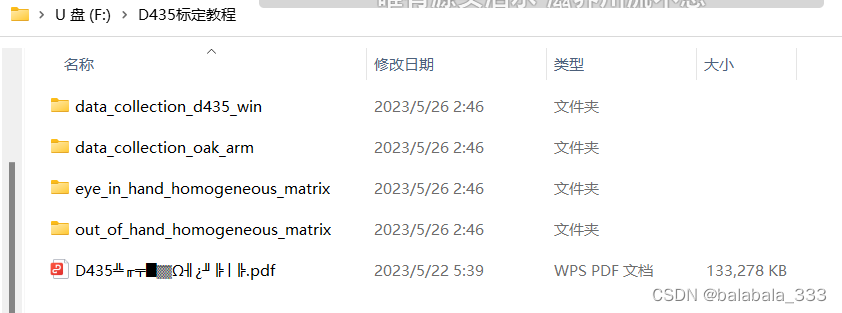
根据提供的文件,使用pycharm打开,进入到data_collection_d435_win文件夹,修改main.py文件里cam0_path变量为保存标定板图片的目标文件夹路径,这里我命名为my_images。

修改L515相机启动参数,如果是D4系列相机可以不做修改:

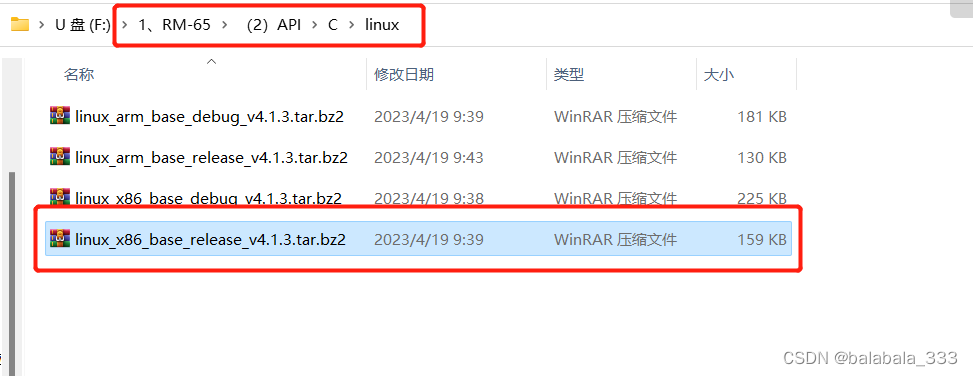
进入到提供的API目录,解压文件,复制
U盘:\1、RM-65\(2)API\C\linux\linux_x86_base_release_v4.1.3\libRM_Base.so文件到
\D435标定教程\data_collection_d435_win\文件目录下,用于替换RM_Base.dll文件,dll文件只用在windows系统下
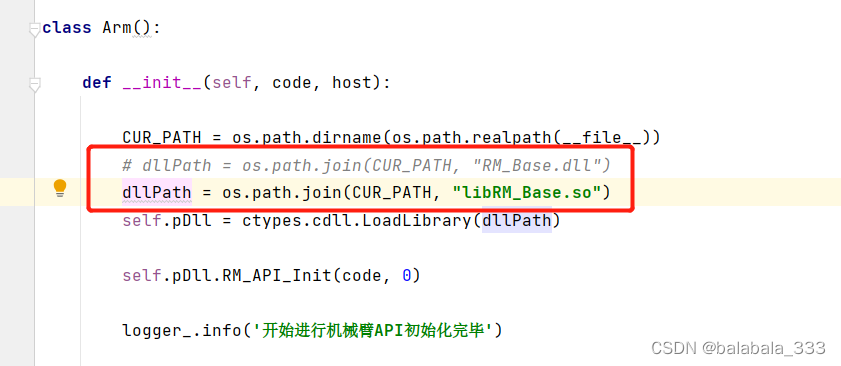
进入data_collection_d435_win/robotic_arm.py,
进行如下修改:
运行data_collection_d435_win/main.py,
有相机拍摄的彩色图出现,按住机械臂末端示教按钮,每次移动机械臂保存一次,保证标定板清晰完整出现在视野范围内且机械臂底座和标定板保持不动,每次少量移动机械臂,且每个关节在整个图片采集流程中都有活动,保存50张图片后手动停止运行。
进入到my_images文件夹下,可以发现有保存的图片和poses.txt文件,poses.txt文件中保存有每次机械臂的位姿。
2.2获取内参矩阵
进入到data_collection_d435_win/main.py,
修改数据源:

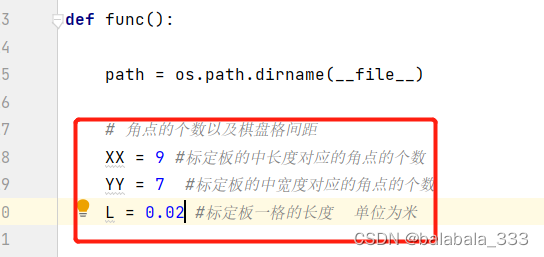
修改棋盘格的角点数和间距:
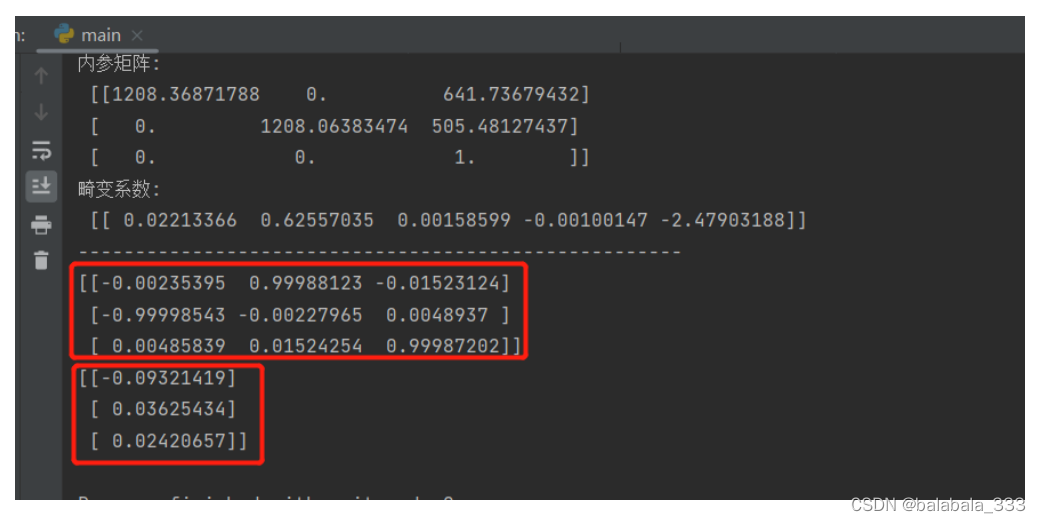
运行main.py文件,输出旋转矩阵和平移向量: