目录
1 R3LIVE框架简介
R3LIVE是香港大学Mars实验室提出的一种融合imu、相机、激光的SLAM方法,R3LIVE由两个子系统组成,一个激光惯性里程计(LIO)和一个视觉惯性里程计(VIO)。LIO子系统(FAST-LIO)利用来自激光雷达和惯性传感器的测量数据,并且构建地图的几何结构(即3D点位置)。VIO子系统使用视觉惯性传感器的数据,并且渲染地图的纹理(即3D点颜色)。更具体而言,VIO子系统通过最小化帧到地图的光度误差直接且有效地融合视觉数据。本文所提出的系统R3LIVE是基于我们之前的工作R2LIVE开发的,它的VIO架构设计与R2LIVE完全不同。

2 R3LIVE的launch文件
在R3LIVE中我们可以看到有这三个launch文件,r3live_bag.launch是LIVOX激光雷达的launch文件,r3live_bag_ouster.launch是64线激光雷达的launch文件,r3live_reconstruct_mesh.launch是纹理贴图的launch文件。在运行自己录制的数据集和在线运行时,对相应的话题名进行更改。
- 首先第一个部分就是定义了一些R3LIVE处理的雷达话题以及IMU视觉以及config配置文件的导入。
- 然后第二个部分就是设置一些对应特定雷达的配置参数
- 第三步就是启动r3live_LiDAR_front_end节点和r3live_mapping节点,这也是我们下面需要结合论文仔细阅读的点
- 最后就是启动rviz
<launch>
<!-- Subscribed topics -->
<param name="LiDAR_pointcloud_topic" type="string" value= "/laser_cloud_flat" /> <!-- 订阅的lidar topic -->
<param name="IMU_topic" type="string" value= "/livox/imu" /> <!-- 订阅的IMU topic -->
<param name="Image_topic" type="string" value= "/camera/image_color" /> <!-- 订阅的image topic -->
<param name="r3live_common/map_output_dir" type="string" value="$(env HOME)/r3live_output" /><!-- 输出的map文件夹 -->
<rosparam command="load" file="$(find r3live)/../config/r3live_config.yaml" /> <!-- 加载的yaml参数文件 -->
<!-- 前端处理节点 -->
<node pkg="r3live" type="r3live_LiDAR_front_end" name="r3live_LiDAR_front_end" output="screen" required="true"/>
<!-- 建图节点 -->
<node pkg="r3live" type="r3live_mapping" name="r3live_mapping" output="screen" required="true" />
<!-- rviz可视化 - 默认打开 -->
<arg name="rviz" default="1" />
<group if="$(arg rviz)">
<node name="rvizvisualisation" pkg="rviz" type="rviz" output="log"
args="-d $(find r3live)/../config/rviz/r3live_rviz_config.rviz" />
</group>
</launch>
3 R3LIVE的r3live_config文件
配置文件对各个模块的参数进行设置,值得注意的是:
- lidar_type根据不同的雷达类型进行更改
- 在使用自己的数据集时,需要修改image_width、image_height、camera_intrinsic、camera_dist_coeffs、camera_ext_R、camera_ext_t,对应相机的尺寸、内外参。
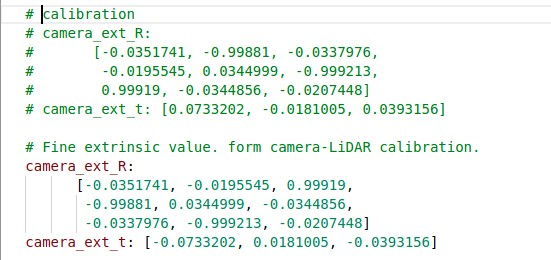
注意:在R3LIVE中使用自己设置外参时,要对此处的得到的外参结果求逆,不然得不到最后的点云着色效果。具体操作是将R按对角线反转,T取负号。
Lidar_front_end:
lidar_type: 1 # 1 for Livox-avia, 3 for Ouster-OS1-64
N_SCANS: 6
using_raw_point: 1
point_step: 1
r3live_common:
if_dump_log: 0 # If recording ESIKF update log. [default = 0]
record_offline_map: 1 # If recording offline map. [default = 1]
pub_pt_minimum_views: 3 # Publish points which have been render up to "pub_pt_minimum_views" time. [default = 3]
minimum_pts_size: 0.01 # The minimum distance for every two points in Global map (unit in meter). [default = 0.01]
image_downsample_ratio: 1 # The downsample ratio of the input image. [default = 1]
estimate_i2c_extrinsic: 1 # If enable estimate the extrinsic between camera and IMU. [default = 1]
estimate_intrinsic: 1 # If enable estimate the online intrinsic calibration of the camera lens. [default = 1]
maximum_vio_tracked_pts: 600 # The maximum points for tracking. [default = 600]
append_global_map_point_step: 4 # The point step of append point to global map. [default = 4]
r3live_vio:
image_width: 1280
image_height: 1024
camera_intrinsic:
[863.4241, 0.0, 640.6808,
0.0, 863.4171, 518.3392,
0.0, 0.0, 1.0 ]
camera_dist_coeffs: [-0.1080, 0.1050, -1.2872e-04, 5.7923e-05, -0.0222] #k1, k2, p1, p2, k3
# Fine extrinsic value. form camera-LiDAR calibration.
camera_ext_R:
[-0.00113207, -0.0158688, 0.999873,
-0.9999999, -0.000486594, -0.00113994,
0.000504622, -0.999874, -0.0158682]
# camera_ext_t: [0.050166, 0.0474116, -0.0312415]
camera_ext_t: [0,0,0]
# Rough extrinsic value, form CAD model, is not correct enough, but can be online calibrated in our datasets.
# camera_ext_R:
# [0, 0, 1,
# -1, 0, 0,
# 0, -1, 0]
# camera_ext_t: [0,0,0]
r3live_lio:
lio_update_point_step: 4 # Point step used for LIO update.
max_iteration: 2 # Maximum times of LIO esikf.
lidar_time_delay: 0 # The time-offset between LiDAR and IMU, provided by user.
filter_size_corner: 0.30
filter_size_surf: 0.30
filter_size_surf_z: 0.30
filter_size_map: 0.304 R3LIVE从哪开始阅读
在CmakeList中我们注意到两个主要的node节点所依赖的cpp文件。我们可以知道r3live_LiDAR_front_end 节点会先运行
# 前端里程计节点
add_executable(r3live_LiDAR_front_end src/loam/LiDAR_front_end.cpp)
target_link_libraries(r3live_LiDAR_front_end ${catkin_LIBRARIES} ${PCL_LIBRARIES})
add_executable(test_timer src/tools/test_timer.cpp)
# 后端建图节点
add_executable(r3live_mapping src/r3live.cpp
src/r3live_lio.cpp
src/loam/include/kd_tree/ikd_Tree.cpp
src/loam/include/FOV_Checker/FOV_Checker.cpp
src/loam/IMU_Processing.cpp
src/rgb_map/offline_map_recorder.cpp
# From VIO
src/r3live_vio.cpp
src/optical_flow/lkpyramid.cpp
src/rgb_map/rgbmap_tracker.cpp
src/rgb_map/image_frame.cpp
src/rgb_map/pointcloud_rgbd.cpp
)
target_link_libraries(r3live_mapping
${catkin_LIBRARIES}
${Boost_LIBRARIES}
${Boost_FILESYSTEM_LIBRARY}
${Boost_SERIALIZATION_LIBRARY} # serialization
${OpenCV_LIBRARIES}
# ${OpenMVS_LIBRARIES}
pcl_common
pcl_io) 这部分内容和FAST-LIO2的内容类似,激光点云首先在LiDAR_front_end节点中提取特征点,将处理完的信息通过/laser_cloud_flat完成节点的发送出去,与FAST-LIO2相同R3LIVE也只用到了面特征作为ESIKF融合。