- KNN算法原理
K近邻(K-nearst neighbors, KNN)是一种基本的机器学习算法,所谓k近邻,就 是k个最近的邻居的意思,说的是每个样本都可以用它最接近的k个邻居来代表。比如:判断一个人的人品,只需要观察与他来往最密切的几个人的人品好坏就可 以得出,即“近朱者赤,近墨者黑”;KNN算法既可以应用于分类应用中,也可以应用在回归应用中。KNN在做回归和分类的主要区别在于最后做预测的时候的决策方式不同。KNN 在分类预测时,一般采用多数表决法;而在做回归预测时,一般采用平均值法。
- KNN三要素
- K值的选择:对于K值的选择,一般根据样本分布选择一个较小的值,然后通过交叉验证来选择一个比较合适的最终值;当选择比较小的K值的时候,表示使用较小领域中的样本进行预测,训练误差会减小,但是会导致模型变得复杂,容易过拟合;当选择较大的K值的时候,表示使用较大领域中的样本进行预测,训练误差会增大,同时会使模型变得简单,容易导致欠拟合;
- 距离的度量:一般使用欧氏距离(欧几里得距离);
- 决策规则:在分类模型中,主要使用多数表决法或者加权多数表决法;在回归模型中,主要使用平均值法或者加权平均值法。
- KNN分类预测规则
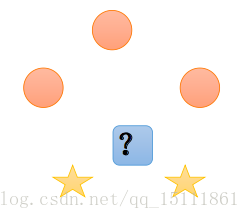
- 多数表决法:每个邻近样本的权重是一样的,也就是说最终预测的结果为出现类别最多的那个类,比如上图中蓝色圆圈的最终类别为红色;
- 加权多数表决法:每个邻近样本的权重是不一样的,一般情况下采用权重和距离成反比的方式来计算,也就是说最终预测结 果是出现权重最大的那个类别;比如上图中,假设三个红色点到待预测样本点的距离均为2,两个黄色点到待预测样本点距离 为1,那么蓝色圆圈的最终类别为黄色。
- KNN回归预测规则
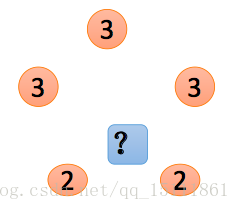
- 平均值法:每个邻近样本的权重是一样的,也就是说最终预测的结果为所有邻近样本的目标属性值的均值;比如上图中,蓝色圆圈的最终预测值为(3+3+3+2+2)/5=2.6;
- 加权平均值法:每个邻近样本的权重是不一样的,一般情况下采用权重和距离成反比的方式来计算,也就是说在计算均值的时候进行加权操作;比如上图中,假设上面三个点到待预测样本点的距离均为2,下面两个点到待预测样本点距离为1,那么蓝色圆圈的最终预测值为:2.43。(权重分别为: 1/7和2/7)
- KNN算法实现方式
- 蛮力实现(brute):计算预测样本到所有训练集样本的距离,然后选择最小的k个距离即可得到K个最邻近点。缺点在于当特征数比较多、样本数比较多的时候,算法的执行效率比较低;
- KD树(kd_tree):KD树算法中,首先是对训练数据进行建模,构建KD树,然后再根据建好的模型来获取邻近样本数据。
- 除此之外,还有一些从KD_Tree修改后的求解最邻近点的算法,比如:Ball Tree、 BBF Tree、MVP Tree等。
- KD Tree构建
KD树采用从m个样本的n维特征中,分别计算n个特征取值的方差,用方差最大的第k维特征nk作为根节点。对于这个特征,升序排列后选择取值的中位数nkv作为样本的划分点,对于小于该值的样本划分到左子树,对于大于等于该值的样本划分到右子树,对左右子树采用同样的方式找方差最大的特征作为根节点,递归即可产生KD树。
- KD Tree查找最近邻
当我们生成KD树以后,就可以去预测测试集里面的样本目标点了。对于一个目标点,我们首先在KD树里面找到包含目标点的叶子节点。以目标点为圆心,以目标点到叶子节点样本实例的距离为半径,得到一个超球体,最近邻的点一定在这个超球体内部。然后返回叶子节点的父节点,检查另一个子节点包含的超矩形体是否和超球体相交,如果相交就到这个子节点寻找是否有更加近的近邻,有的话 就更新最近邻。如果不相交那就简单了,我们直接返回父节点的父节点,在另一 个子树继续搜索最近邻。当回溯到根节点时,算法结束,此时保存的最近邻节点 就是最终的最近邻。
- 示例
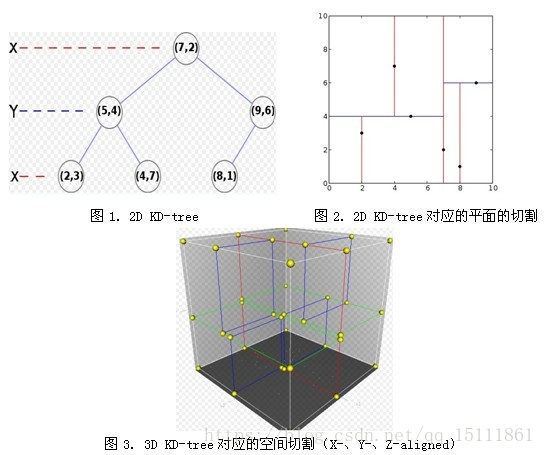
假设样本集为:{(2,3), (5,4), (9,6), (4,7), (8,1), (7,2)}。构建过程如下:
(1)确定split域,6个数据点在x,y维度上的数据方差分别为39, 28.63。在x轴上方差最大,所以split域值为0(x维的序号为0)
(2)确定分裂节点,根据x维上的值将数据排序,则6个数据点再排序后位于中间的那个数据点为(7,2),该结点就是分割超平面就是通过(7,2)并垂直于split=0(x)轴的直线x=7
(3)左子空间和右子空间,分割超面x=7将整个空间氛围两部分,x<=7的部分为左子空间,包含3个数据点{(2,3), (5,4), (4,7)};另一部分为右子空间,包含2个数据点{(9,6), (8,1)}。
(4)分别对左子空间中的数据点和右子空间中的数据点重复上面的步骤构建左子树和右子树直到经过划分的子样本集为空。
我们来查找点(2.1,3.1),在(7,2)点测试到达(5,4),在(5,4)点测试到达(2,3),然后search_path中的结点为<(7,2), (5,4), (2,3)>,从search_path中取出(2,3)作为当前最佳结点nearest, dist为0.141;
然后回溯至(5,4),以(2.1,3.1)为圆心,以dist=0.141为半径画一个圆,并不和超平面y=4相交,如下图,所以不必跳到结点(5,4)的右子空间去搜索,因为右子空间中不可能有更近样本点了。

于是在回溯至(7,2),同理,以(2.1,3.1)为圆心,以dist=0.141为半径画一个圆并不和超平面x=7相交,所以也不用跳到结点(7,2)的右子空间去搜索。
至此,search_path为空,结束整个搜索,返回nearest(2,3)作为(2.1,3.1)的最近邻点,最近距离为0.141。
再举一个稍微复杂的例子,我们来查找点(2,4.5),在(7,2)处测试到达(5,4),在(5,4)处测试到达(4,7),然后search_path中的结点为<(7,2), (5,4), (4,7)>,从search_path中取出(4,7)作为当前最佳结点nearest, dist为3.202;
然后回溯至(5,4),以(2,4.5)为圆心,以dist=3.202为半径画一个圆与超平面y=4相交,如下图,所以需要跳到(5,4)的左子空间去搜索。所以要将(2,3)加入到search_path中,现在search_path中的结点为<(7,2), (2, 3)>;另外,(5,4)与(2,4.5)的距离为3.04 < dist = 3.202,所以将(5,4)赋给nearest,并且dist=3.04。

回溯至(2,3),(2,3)是叶子节点,直接平判断(2,3)是否离(2,4.5)更近,计算得到距离为1.5,所以nearest更新为(2,3),dist更新为(1.5)
回溯至(7,2),同理,以(2,4.5)为圆心,以dist=1.5为半径画一个圆并不和超平面x=7相交, 所以不用跳到结点(7,2)的右子空间去搜索。
至此,search_path为空,结束整个搜索,返回nearest(2,3)作为(2,4.5)的最近邻点,最近距离为1.5。