Pangolin库是一个轻量级的跨平台视图控制库,主要用于可视化、交互和调试三维数据。该库提供了一系列图形界面工具,包括窗口、OpenGL渲染器、3D相机、图像显示等,可以方便地进行三维数据可视化和交互。
Pangolin库的主要特点如下:
-
轻量级:Pangolin库的代码量很少,只依赖于少量的第三方库,因此非常轻量级,可以很容易地集成到其他项目中。
-
跨平台:Pangolin库支持跨平台开发,可以在Windows、Linux和Mac OS等操作系统上使用。
-
多功能:Pangolin库提供了丰富的图形界面工具,包括窗口、OpenGL渲染器、3D相机、图像显示等,可以满足不同需求的开发者。
-
易于使用:Pangolin库的接口简单易用,可以快速搭建三维数据可视化和交互界面,同时还提供了丰富的示例程序和文档,方便开发者上手使用。
-
开源免费:Pangolin库是开源的,使用MIT许可证发布,可以免费使用、修改和分发。
Pangolin库下载:
https://github.com/stevenlovegrove/Pangolin/tree/1ec721d59ff6b799b9c24b8817f3b7ad2c929b83
百度网盘链接: https://pan.baidu.com/s/1W75vsmctFheksPfExzpU4A 提取码: rwg2
cd Pagolin
mkdir build
cd build
cmake ..
makeEigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。但没有提供李代数的支持。
Sophus库提供一个较好的李群和李代数的库,它很好的支持了SO(3),so(3),SE(3)和se(3)。是基于Eigen基础上开发的,继承了Eigen库中的定义的各个类。
安装Eigen库:
sudo apt install libeigen3-devEigen 头文件路径默认安装在:
"/usr/include/eigen3/"注:Eigen是一个纯用头文件搭建起来的库,因此不需要链接库文件,只需要引入Eigen的头文件即可,后续的CMakeLists.txt 文件有体现到。
安装Sophus库:
可以通过GitHub下载最新的:(现在是1.22.10版本)
git clone https://github.com/strasdat/Sophus.git也可以通过百度网盘:(1.0.0)
链接: https://pan.baidu.com/s/1aCJzvDNRAfz_VEtH47DslA 提取码: xtak
安装:
cd Sophus
mkdir build
cd build
cmake ..
make若出现下面问题:
Could not find a package configuration file provided by "fmt" with any of
the following names:fmtConfig.cmake
fmt-config.cmake
则需要再安装一个fmt库:
git clone https://github.com/fmtlib/fmt.git
cd fmt
mkdir build
cd build
cmake ..
make
sudo make install使用Pangolin绘制轨迹
// pangolin库
#include <pangolin/pangolin.h>
// Eigen库
#include <Eigen/Core>
#include <Eigen/Dense>
#include <unistd.h>
#include <string>
#include <vector>
#include <fstream>
// 演示了如何画出一个预先存储的轨迹
std::string trajectory_file = "./trajectory.txt"; // 轨迹文件
// 格式为:time,tx,ty,tz,qx,qy,qz,qw
void DrawTrajectory(std::vector<Eigen::Isometry3d,Eigen::aligned_allocator<Eigen::Isometry3d>> poses){
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer",1024,768); // 创建窗口
glEnable(GL_DEPTH_TEST); // 开启深度测试
glEnable(GL_BLEND); // 开启混合渲染
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); // 设置混合函数
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000), //投影矩阵
// 屏幕的宽度、高度、相机的水平视角、垂直视角、相机在z轴上的位置、相机到屏幕的距离的最小值和最大值。
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) // 视图矩阵
// 相机的位置、相机观察的目标点、相机的朝向向量
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f)
// 表示窗口在x轴和y轴上的起点和终点位置,以及窗口的宽高比,宽高比为负数,则实际上是768:1024
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); // 清空颜色缓冲区和深度缓冲区
d_cam.Activate(s_cam); // 激活显示窗口和渲染状态对象
glClearColor(1.0f, 1.0f, 1.0f, 1.0f); // 设置清屏颜色
glLineWidth(2); // 设置线宽
for (size_t i = 0; i < poses.size(); i++) {
// 画每个位姿的三个坐标轴
Eigen::Vector3d Ow = poses[i].translation(); // 获取相机位姿矩阵中的平移部分,即相机的位置。
Eigen::Vector3d Xw = poses[i] * (0.1 * Eigen::Vector3d(1, 0, 0)); // 获取x轴方向的单位向量,乘以0.1是为了调整坐标轴线段的长度
Eigen::Vector3d Yw = poses[i] * (0.1 * Eigen::Vector3d(0, 1, 0)); // 获取y轴方向的单位向量
Eigen::Vector3d Zw = poses[i] * (0.1 * Eigen::Vector3d(0, 0, 1)); // 获取z轴方向的单位向量
glBegin(GL_LINES); // 开始绘制线段
glColor3f(1.0, 0.0, 0.0); // 设置线段颜色 rgb
// 绘制线段的两个端点
glVertex3d(Ow[0], Ow[1], Ow[2]); // 原点的坐标
glVertex3d(Xw[0], Xw[1], Xw[2]); // x轴方向的坐标 ----> 绘制x轴线段 为红色
glColor3f(0.0, 1.0, 0.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);// 原点的坐标
glVertex3d(Yw[0], Yw[1], Yw[2]);// y轴方向的坐标 ----> 绘制y轴线段 为绿色
glColor3f(0.0, 0.0, 1.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);// 原点的坐标
glVertex3d(Zw[0], Zw[1], Zw[2]);// z轴方向的坐标 ----> 绘制z轴线段 为蓝色
glEnd(); // 结束绘制
}
// 画出连线
for (size_t i = 0; i < poses.size(); i++) {
glColor3f(0.0, 0.0, 0.0); // 黑色
glBegin(GL_LINES); // 开始绘制线段
auto p1 = poses[i], p2 = poses[i + 1]; // 获取相邻相机位姿
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]); // 绘制线段的两个端点(相邻相机位姿的位置)
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame(); // 结束当前帧的绘制
usleep(5000); // sleep 5ms ,每5ms绘画一次
}
}
int main(int argc,char** argv)
{
std::vector<Eigen::Isometry3d,Eigen::aligned_allocator<Eigen::Isometry3d>> poses;
std::ifstream fin(trajectory_file);
if(!fin){
std::cout << "cannot find trajectory file at " << trajectory_file << std::endl;
return -1;
}
while (!fin.eof()) {
double time, tx, ty, tz, qx, qy, qz, qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Eigen::Isometry3d Twr(Eigen::Quaterniond(qw, qx, qy, qz));
Twr.pretranslate(Eigen::Vector3d(tx, ty, tz));
poses.push_back(Twr);
}
std::cout << "read total " << poses.size() << " pose entries" << std::endl;
// draw trajectory in pangolin
DrawTrajectory(poses);
return 0;
}CMakeLists.txt文件:
# 声明要求的cmake最低版本
cmake_minimum_required(VERSION 2.8)
# 声明一个cmake工程
project(Examples)
# 查找系统的库路径
find_package(Pangolin REQUIRED)
# 添加头文件
include_directories(
"/usr/include/eigen3"
${Pangolin_INCLUDE_DIRS}
)
# 添加可执行程序
add_executable(plotTrajectory plotTrajectory.cc)
# 链接库文件
target_link_libraries(plotTrajectory ${Pangolin_LIBRARIES})
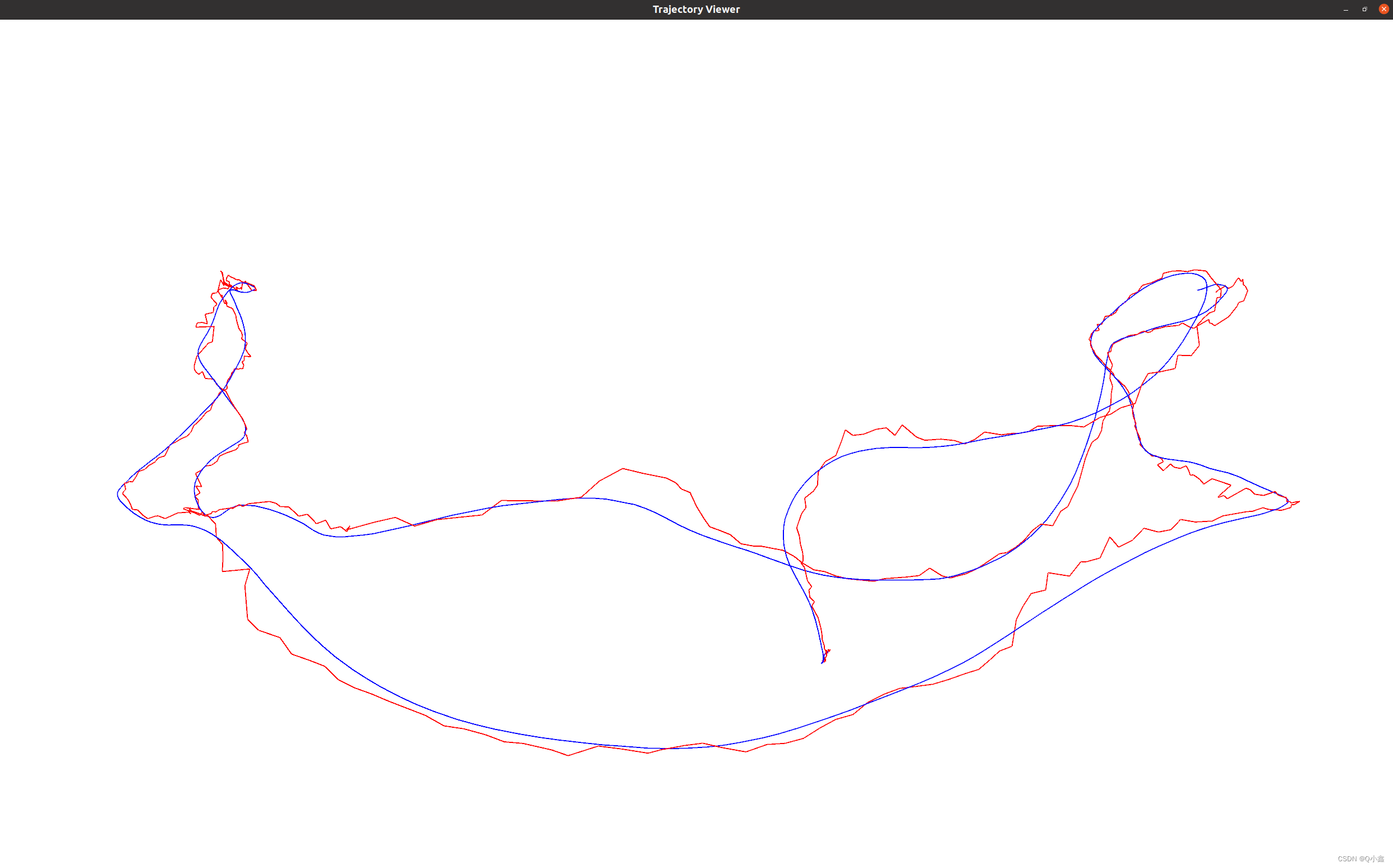
估计轨迹的误差
在实际工程当中,需要估计一个算法估计轨迹(estimate trajectory)和真实轨迹(groundtruth trajectory) 的差异来评价算法的精度。
绝对轨迹误差(Absolute Trajectory Error,ATE)

这实际上是每个位姿李代数的均方根误差(Root-Mean-Squared Error,RMSE)
#include <iostream>
#include <fstream>
#include <unistd.h>
#include <string>
#include <vector>
// Pangolin库
#include <pangolin/pangolin.h>
// Sophus库
#include <sophus/se3.hpp>
// 轨迹文件路径
std::string groundtruth_file = "./groundtruth.txt";
std::string estimated_file = "./estimated.txt";
using TrajectoryType = std::vector<Sophus::SE3d,Eigen::aligned_allocator<Sophus::SE3d> >;
// 读取轨迹txt文件
TrajectoryType ReadTrajectory(const std::string &path) {
std::ifstream fin(path);
TrajectoryType trajectory;
if (!fin) {
std::cerr << "trajectory " << path << " not found." << std::endl;
return trajectory;
}
while (!fin.eof()) {
double time, tx, ty, tz, qx, qy, qz, qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Sophus::SE3d p1(Eigen::Quaterniond(qw, qx, qy, qz), Eigen::Vector3d(tx, ty, tz));
trajectory.push_back(p1);
}
return trajectory;
}
// 绘制两条轨迹(一个是真实轨迹,一个是估计轨迹)
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti){
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer",1024,768); // 创建窗口
glEnable(GL_DEPTH_TEST); // 开启深度测试
glEnable(GL_BLEND); // 开启混合渲染
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); // 设置混合函数
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000), //投影矩阵
// 屏幕的宽度、高度、相机的水平视角、垂直视角、相机在z轴上的位置、相机到屏幕的距离的最小值和最大值。
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) // 视图矩阵
// 相机的位置、相机观察的目标点、相机的朝向向量
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f)
// 表示窗口在x轴和y轴上的起点和终点位置,以及窗口的宽高比,宽高比为负数,则实际上是768:1024
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); // 清空颜色缓冲区和深度缓冲区
d_cam.Activate(s_cam); // 激活显示窗口和渲染状态对象
glClearColor(1.0f, 1.0f, 1.0f, 1.0f); // 设置清屏颜色
glLineWidth(2); // 设置线宽
// 画出真实轨迹
for (size_t i = 0; i < gt.size() - 1; i++) {
glColor3f(0.0, 0.0, 1.0); // 蓝色
glBegin(GL_LINES); // 开始绘制线段
auto p1 = gt[i], p2 = gt[i + 1]; // 获取相邻相机位姿
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]); // 绘制线段的两个端点(相邻相机位姿的位置)
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
// 画出估计轨迹
for (size_t i = 0; i < esti.size() - 1; i++) {
glColor3f(1.0, 0.0, 0.0); // 红色
glBegin(GL_LINES); // 开始绘制线段
auto p1 = esti[i], p2 = esti[i + 1]; // 获取相邻相机位姿
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]); // 绘制线段的两个端点(相邻相机位姿的位置)
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame(); // 结束当前帧的绘制
usleep(5000); // sleep 5ms ,每5ms绘画一次
}
}
int main(int argc,char** argv)
{
TrajectoryType groundtruth = ReadTrajectory(groundtruth_file);
TrajectoryType estimated = ReadTrajectory(estimated_file);
// assert(!groundtruth.empty() && !estimated.empty());
// assert(groundtruth.size() == estimated.size());
if(groundtruth.empty() && estimated.empty() && (groundtruth.size() == estimated.size())){
// 判断读取的真实轨迹文件和估计轨迹文件是否为空,并且判断两个文件的数据大小是否一致
std::cout << "groudtruth file or estimated_file is error!" << std::endl;
return -1;
}
// 计算ATE(绝对轨迹误差)
double ate = 0;
for (size_t i = 0; i < estimated.size();i++){
Sophus::SE3d p1 = estimated[i];
Sophus::SE3d p2 = groundtruth[i];
double error = (p2.inverse()*p1).log().norm();
ate += (error*error);
}
ate = ate / double(estimated.size());
ate = sqrt(ate);
std::cout << "ATE: " << ate << std::endl;
// 绘制两条轨迹
DrawTrajectory(groundtruth,estimated);
return 0;
}CMakeLists.txt文件:
# 声明要求的cmake最低版本
cmake_minimum_required(VERSION 3.16)
# 声明一个cmake工程
project(example)
# 查找系统的库路径
find_package(Sophus REQUIRED)
find_package(Pangolin REQUIRED)
# 添加头文件
include_directories("/usr/include/eigen3")
# 添加可执行程序
add_executable(trajectoryError trajectoryError.cc)
# 链接库文件
target_link_libraries(trajectoryError
Sophus::Sophus
${Pangolin_LIBRARIES}
)