写在前面
1、本文内容
读取IMU实时数据绘制运动轨迹
2、平台
ubuntu1804, ros melodic
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/126153277
代码
mkdir -p imu_ws/src
cd imu_ws/src
catkin_create_pkg imu_path roscpp rospy tf nav_msgs
cd ..
把imu_tf_pose.cpp放进src/imu_path/src
在src/imu_path/CMakeLists.txt中添加
add_executable(imu_tf_pose src/imu_tf_pose.cpp)
target_link_libraries( imu_tf_pose ${catkin_LIBRARIES})# ${SERIAL_LIB}
imu_tf_pose.cpp
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <tf/transform_broadcaster.h>
#include <string>
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Geometry>
#include "nav_msgs/Path.h"
/* 参考ROS wiki
* http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20broadcaster%20%28C%2B%2B%29
* */
int count=0;
Eigen::Quaterniond Qwb(1.0,0.0,0.0,0.0);//Eigen::Quaterniond的顺序w, x, y z,
Eigen::Vector3d gw(0,0,-9.81); // ENU frame
Eigen::Vector3d Vw=Eigen::Vector3d::Zero(); //
Eigen::Vector3d Pwb(1.0,1.0,0.0);
ros::Publisher m_midPath_pub;
void PublishPath(ros::Publisher& puber, std::vector<Eigen::Vector3d> position, std::vector<Eigen::Quaterniond> rotation)
{
nav_msgs::Path path_msg;
geometry_msgs::PoseStamped pose;
pose.header.stamp = ros::Time::now();
// pose.header.frame_id = "/world";
pose.header.frame_id = "/vio_odom_link";
for(int i = 0; i < position.size();i++)
{
Eigen::Quaterniond Q_from_R = rotation[i];
Eigen::Vector3d traj_node = position[i];
pose.pose.position.x = traj_node(0);
pose.pose.position.y = traj_node(1);
pose.pose.position.z = traj_node(2);
pose.pose.orientation.x = Q_from_R.x();
pose.pose.orientation.y = Q_from_R.y();
pose.pose.orientation.z = Q_from_R.z();
pose.pose.orientation.w = Q_from_R.w();
path_msg.poses.push_back(pose);
}
path_msg.header.stamp = ros::Time::now();
path_msg.header.frame_id = "/vio_odom_link";
// path_msg.header.frame_id = "/world";
puber.publish(path_msg);
}
void ImuCallback(const sensor_msgs::ImuConstPtr& imu_data) {
static tf::TransformBroadcaster br;//广播器
tf::Transform transform;
static std::vector<Eigen::Vector3d> midPosition;
static std::vector<Eigen::Quaterniond> midRotation;
static double last_time;
++count;
if(count<=50){
// std::cout<<imu_data->header.seq<<std::endl;
last_time=imu_data->header.stamp.toSec();
return;
}
double now_time=imu_data->header.stamp.toSec();
double dt=now_time-last_time;
// std::cout<<now_time - last_time<<std::endl;
last_time=now_time;
// //pre_integration_euler 欧拉积分
// Eigen::Quaterniond dq;
// Eigen::Vector3d dtheta_half ={imu_data->angular_velocity.x, imu_data->angular_velocity.y, imu_data->angular_velocity.z};
// // std::cout<<"imu_data->angular_velocity: "<<imu_data->angular_velocity<<std::endl;
// dtheta_half=dtheta_half*dt/2.0;
// // std::cout<<"dtheta_half "<<dtheta_half<<std::endl;
// dq.w() = 1;
// dq.x() = dtheta_half.x();
// dq.y() = dtheta_half.y();
// dq.z() = dtheta_half.z();
// Eigen::Vector3d imu_acc(imu_data->linear_acceleration.x,imu_data->linear_acceleration.y,imu_data->linear_acceleration.z);
// Eigen::Vector3d acc_w = Qwb.normalized() * (imu_acc)+gw;
// // std::cout<<Qwb.w()<<" "<<Qwb.x()<<" "<<Qwb.y()<<" "<<Qwb.z()<<std::endl;
// Qwb = Qwb * dq;
// Qwb.normalize();
// std::cout<<"Vw:\n"<<Vw<<std::endl;
// Vw = Vw + acc_w * dt;
// Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w;
//pre_integration_mid 中值积分
static Eigen::Vector3d last_acc = Eigen::Vector3d::Zero() ;
static Eigen::Vector3d last_gyr = Eigen::Vector3d::Zero() ;
static bool first_flag = true;
Eigen::Vector3d imu_acc(imu_data->linear_acceleration.x,imu_data->linear_acceleration.y,imu_data->linear_acceleration.z);
Eigen::Vector3d imu_gyro(imu_data->angular_velocity.x, imu_data->angular_velocity.y, imu_data->angular_velocity.z);
if(first_flag == true)
{
first_flag = false;
// last_acc = Qwb.normalized() * (Eigen::Vector3d::Zero()) + gw;
// last_gyr =Eigen::Vector3d::Zero();
last_acc = Qwb.normalized() * (imu_acc) + gw;
last_gyr =imu_gyro;
}
Eigen::Quaterniond dq;
Eigen::Vector3d dtheta_half = (imu_gyro + last_gyr) / 2.0 * dt / 2.0;
dq.w() = 1;
dq.x() = dtheta_half.x();
dq.y() = dtheta_half.y();
dq.z() = dtheta_half.z();
Eigen::Vector3d acc_k = Qwb.normalized() * (imu_acc) + gw;
Eigen::Vector3d acc_mid = (acc_k + last_acc) / 2.0;
Qwb = Qwb.normalized() * dq.normalized();
Vw = Vw+acc_mid * dt;
Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_mid;
// std::cout<<"count "<<count<<std::endl;
// std::cout<<"dt: "<<dt<<std::endl;
// std::cout<<"imu_gyro: \n"<<imu_gyro.x()<<" "<<imu_gyro.y()<<" "<<imu_gyro.z()<<std::endl;
// std::cout<<"last_acc: \n"<<last_acc.x()<<" "<<last_acc.y()<<" "<<last_acc.z()<<std::endl;
// std::cout<<"imu_acc: \n"<<imu_acc.x()<<" "<<imu_acc.y()<<" "<<imu_acc.z()<<std::endl;
// std::cout<<"acc_k: \n"<<acc_k.x()<<" "<<acc_k.y()<<" "<<acc_k.z()<<std::endl;
// std::cout<<"acc_mid: \n"<<acc_mid.x()<<" "<<acc_mid.y()<<" "<<acc_mid.z()<<std::endl;
// std::cout<<"Vw: \n"<<Vw.x()<<" "<<Vw.y()<<" "<<Vw.z()<<std::endl<<std::endl;
last_acc = acc_k;
last_gyr = imu_gyro;
// save path
midPosition.push_back(Pwb);
midRotation.push_back(Qwb);
if(count % 5 == 0)
{
PublishPath(m_midPath_pub, midPosition, midRotation);
std::cout << " mid-integration pub path : " << count << std::endl;
}
transform.setOrigin(tf::Vector3(Pwb.x(), Pwb.y(), Pwb.z()));//设置平移部分
// transform.setOrigin(tf::Vector3(position_x, position_y, position_z));//设置平移部分
//从IMU消息包中获取四元数数据
tf::Quaternion q;
q.setX(Qwb.x());
q.setY(Qwb.y());
q.setZ(Qwb.z());
q.setW(Qwb.w());
q.normalized();//归一化
transform.setRotation(q);//设置旋转部分
//广播出去
// br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", "imu"));
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "vio_odom_link", "imu_sim"));
}
int main (int argc, char ** argv) {
ros::init(argc, argv, "imu_data_to_tf");
ros::NodeHandle node;
m_midPath_pub = node.advertise<nav_msgs::Path>("/imu_path", 10);
//IMU_data改成自己imu的话题就行了
ros::Subscriber sub = node.subscribe("/IMU_data", 10, &ImuCallback);
ros::spin();
return 0;
}
编译运行
catkin_make
source ./devel/setup.bash
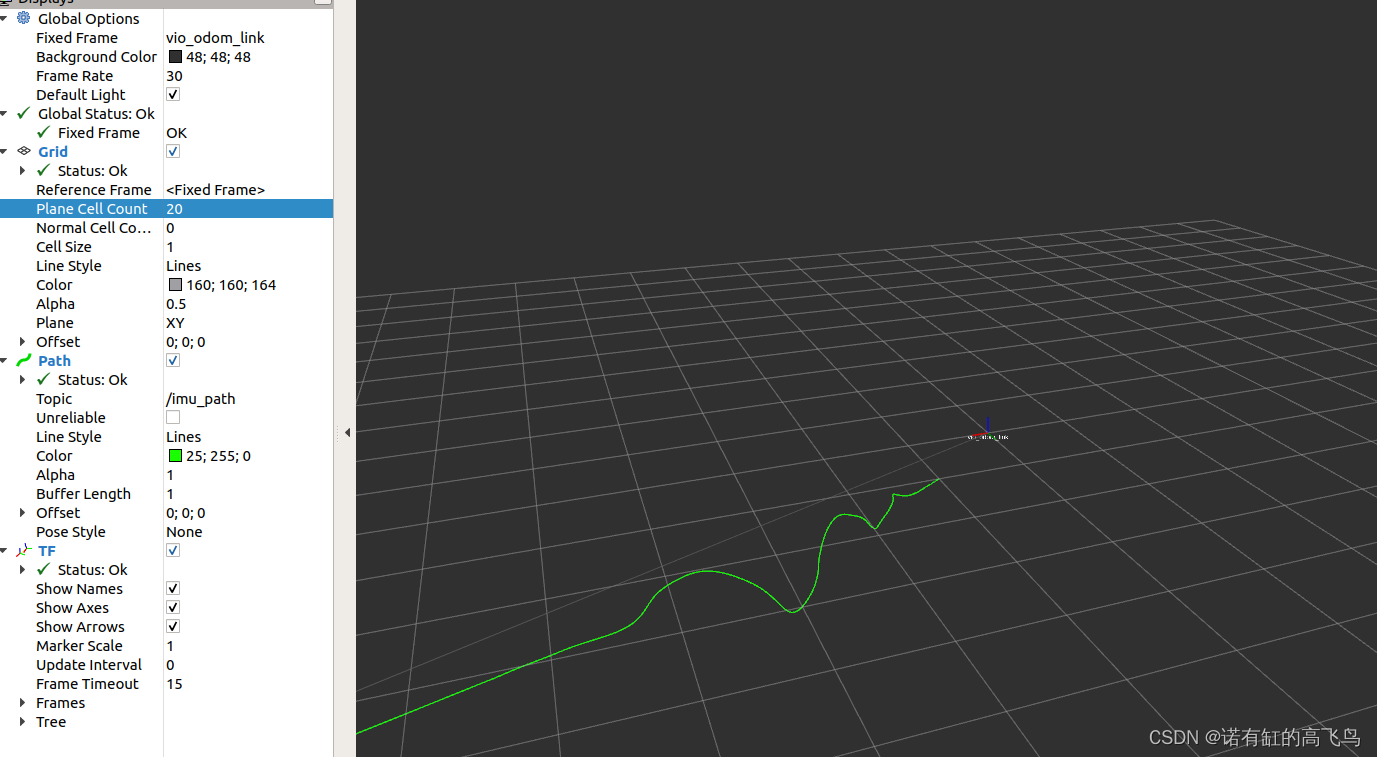
连上IMU,打开rviz,rivz配置如下图
rosrun imu_path imu_tf_pose
摆动IMU会看到轨迹
放置IMU在水平面不动也会看到轨迹在动,因为平面一般都不是真正完全水平,重力加速度会在水平xy方向有加速度分量
注意
//IMU_data改成自己imu的话题就行了
ros::Subscriber sub = node.subscribe("/IMU_data", 10, &ImuCallback);
参考
https://github.com/robosu12/imu_data_simulation
数值积分方法:欧拉积分、中点积分和龙格-库塔法积分 https://blog.csdn.net/qq_41102371/article/details/125935198
完
如有错漏,敬请指正
--------------------------------------------------------------------------------------------202207