FreeRTOS介绍

FreeRTOS(Real-Time Operating System)是一款开源的实时操作系统内核,专为嵌入式系统和微控制器设计。它由Richard Barry开发,最初发布于2003年。FreeRTOS提供了一套功能丰富的实时调度和任务管理机制,可用于在嵌入式系统中实现多任务处理。
FreeRTOS的主要目标是为嵌入式应用程序提供一个轻量级、高效和可移植的实时操作系统。它被广泛应用于各种嵌入式设备和应用领域,如工业自动化、物联网设备、消费电子、汽车控制系统、医疗设备等。

FreeRTOS主要特点
-
实时调度:允许开发者创建多个任务,并根据任务的优先级实现实时调度,确保高优先级任务在低优先级任务之前得到执行。
-
任务管理:支持任务的创建、删除和挂起,以及任务间的通信和同步,通过信号量、队列、互斥量和事件标志组等同步原语。
-
内存管理:提供内存管理功能,可根据应用需求选择静态内存分配或动态内存分配方式。
-
软件定时器:包含软件定时器,允许应用程序实现周期性或一次性的定时功能。
-
低功耗支持:支持节拍休眠模式,允许微控制器在空闲时进入低功耗状态以节省能源。
-
可移植性:FreeRTOS被设计为高度可移植,支持多种处理器架构和开发工具链。
使用FreeRTOS,开发者可以实现复杂的实时任务处理,使嵌入式系统能够高效、可靠地执行多个任务。它的简单性、可移植性和开源特性使得FreeRTOS成为嵌入式开发中广受欢迎的实时操作系统内核之一。
什么时候用FreeRTOS

-
多任务处理:如果STM32应用程序需要同时执行多个任务,并需要对这些任务进行实时调度和管理,那么使用FreeRTOS是一个很好的选择。FreeRTOS允许在单个STM32微控制器上创建多个任务,并根据任务的优先级来进行实时调度,以确保高优先级任务能够及时得到执行。
-
任务间通信和同步:如果应用程序中的不同任务需要相互通信和同步,例如通过消息传递或共享数据,那么FreeRTOS提供的同步原语(如队列、信号量、互斥量等)能够方便地实现这些功能。
-
实时性要求:某些应用场景对实时性要求很高,需要在严格的时间约束下执行任务。FreeRTOS是一个实时操作系统,能够提供可靠的任务调度和响应机制,以满足这些实时性要求。
-
节能和低功耗:FreeRTOS支持节拍休眠模式,允许微控制器在空闲时进入低功耗状态,以节省能源。如果应用需要在低功耗模式下运行,FreeRTOS可以帮助您实现这一点。
-
复杂任务处理:对于涉及复杂任务处理、多线程控制或状态机的应用,使用FreeRTOS能够更好地组织代码结构,提高代码可读性和维护性。
-
跨平台移植性:如果应用需要在不同的硬件平台上运行,FreeRTOS提供了高度可移植的特性,使应用代码更易于移植和重用。
STM32应用程序需要多任务处理、任务间通信和同步、实时性保障或节能低功耗功能时,考虑使用FreeRTOS是非常合适的选择。但请注意,每个应用的需求不同,对于简单的应用或资源受限的场景,也可以选择其他轻量级的任务管理方案或编写简单的轮询式代码来实现功能。
STM32CubeMX中如何使用FreeRTOS
在STM32CubeMX中使用FreeRTOS非常简单。STM32CubeMX是STMicroelectronics提供的图形化配置工具,用于快速生成STM32微控制器的初始化代码和配置。它支持将FreeRTOS集成到STM32项目中,可以轻松地创建和管理FreeRTOS任务并利用其实时调度功能。
以下是在STM32CubeMX中使用FreeRTOS的基本步骤:
-
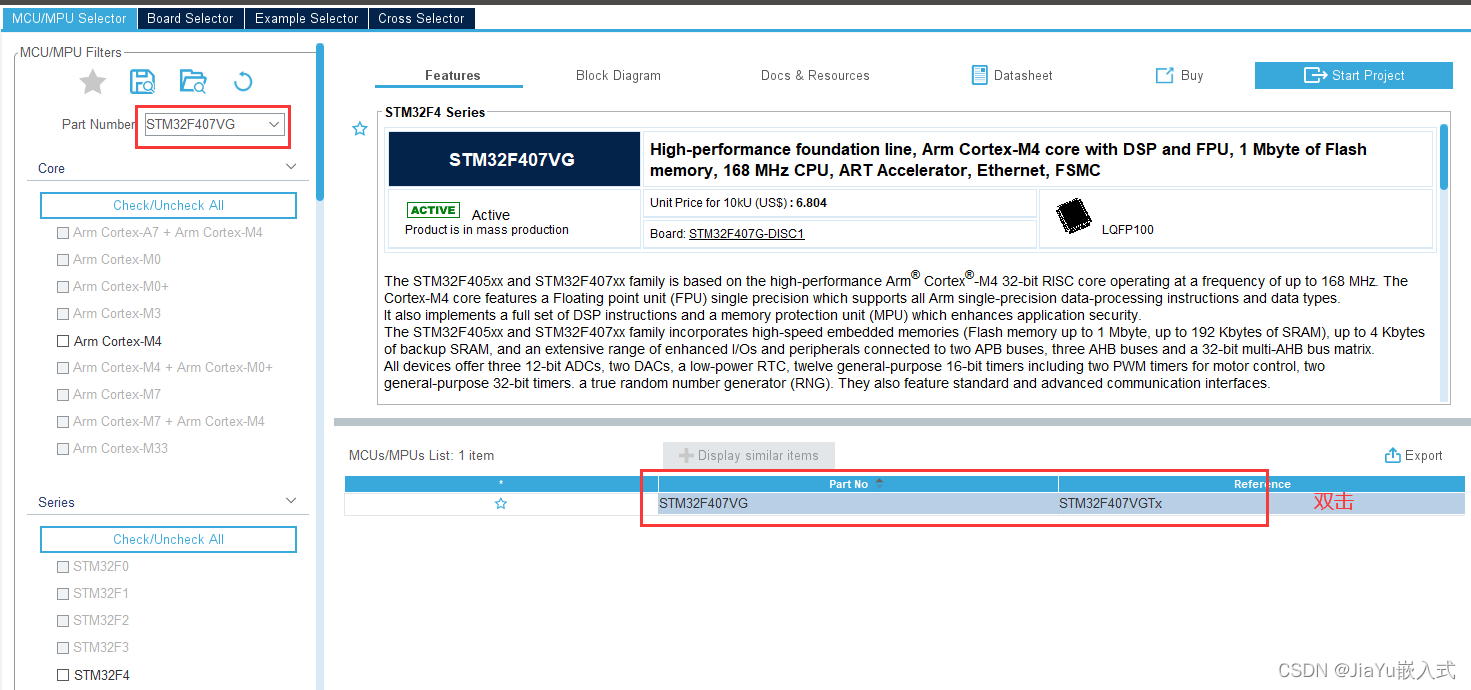
打开STM32CubeMX:首先,打开STM32CubeMX工具,并选择STM32微控制器型号。
-
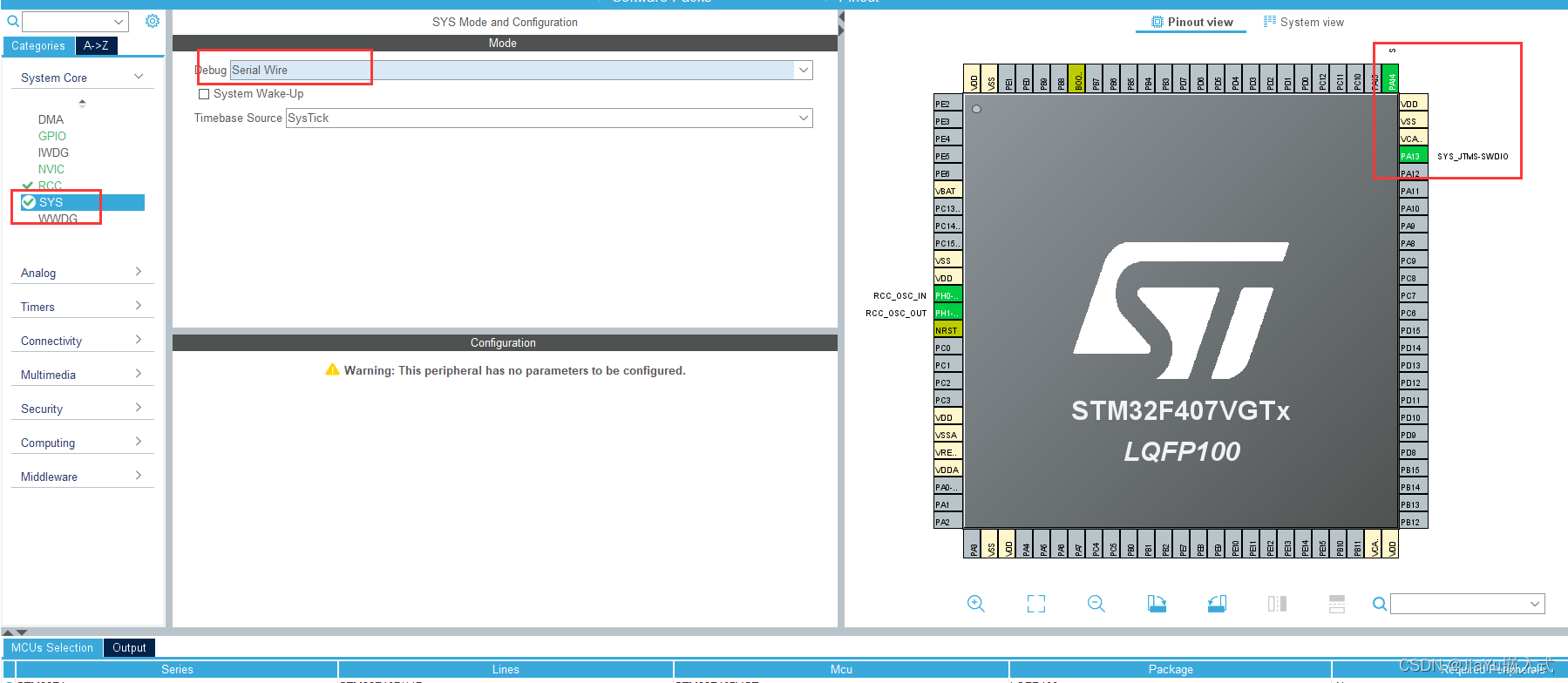
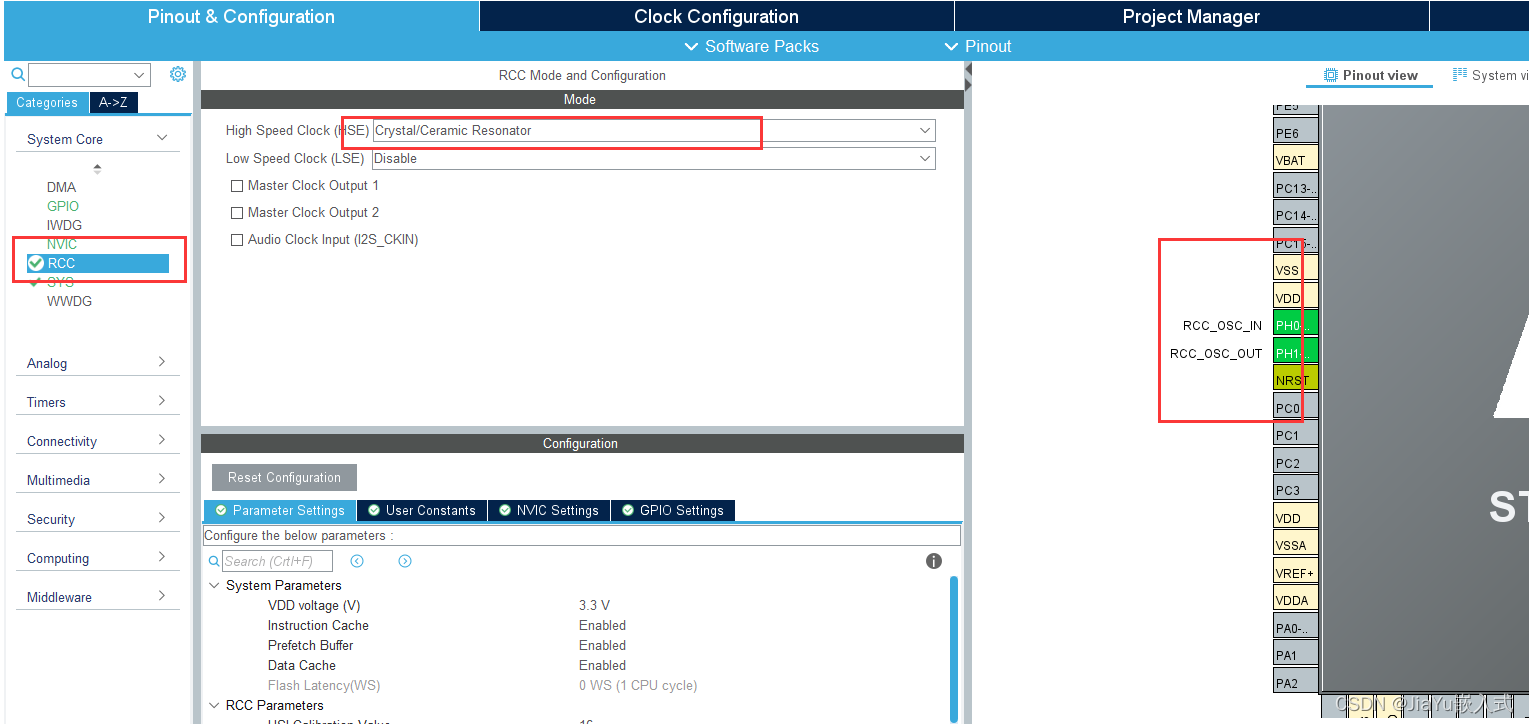
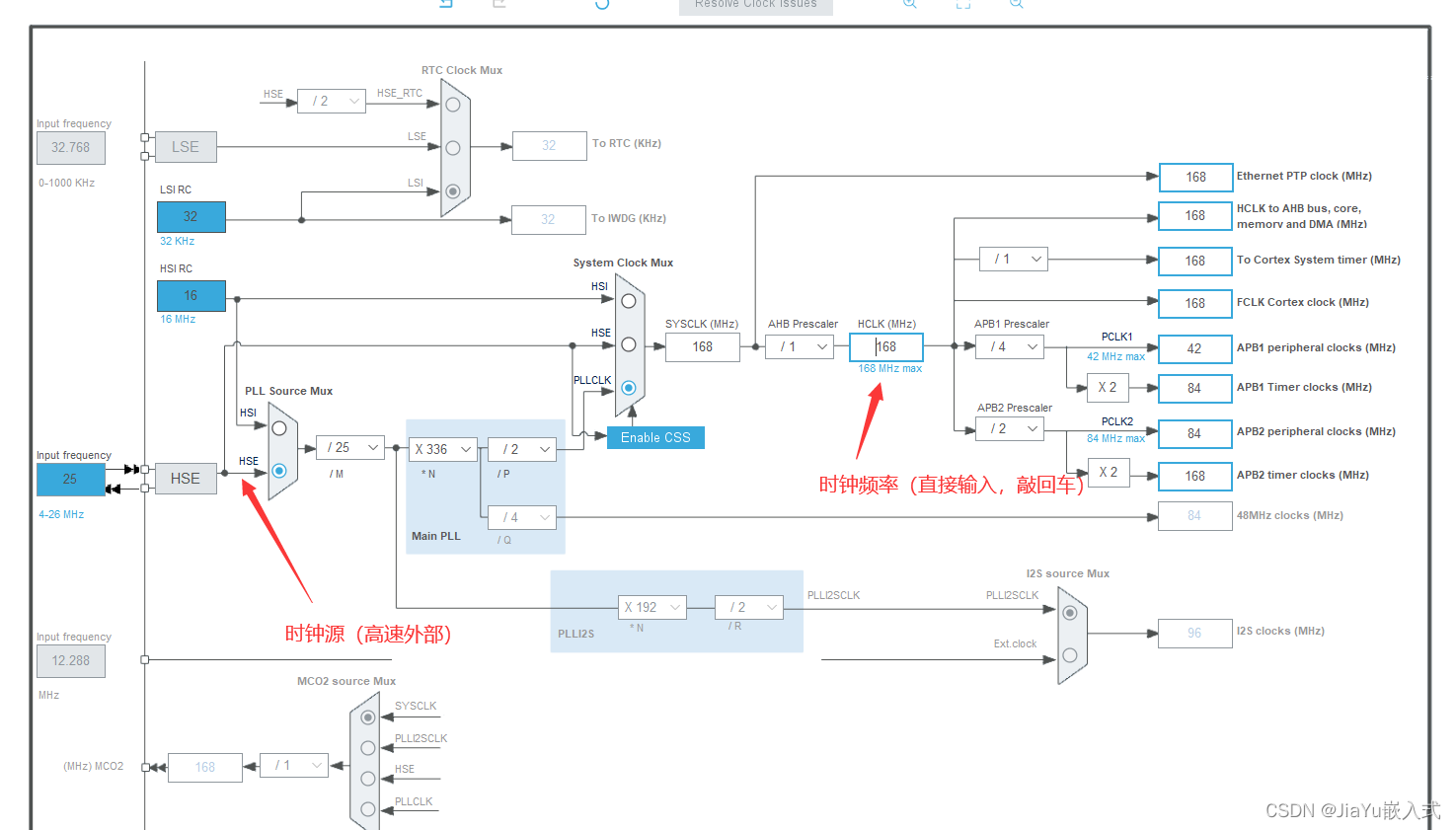
配置系统时钟和外设:根据项目需求,在"Configuration"选项卡中配置系统时钟和外设。这包括配置时钟源、时钟频率、GPIO引脚、外设模块等。

-
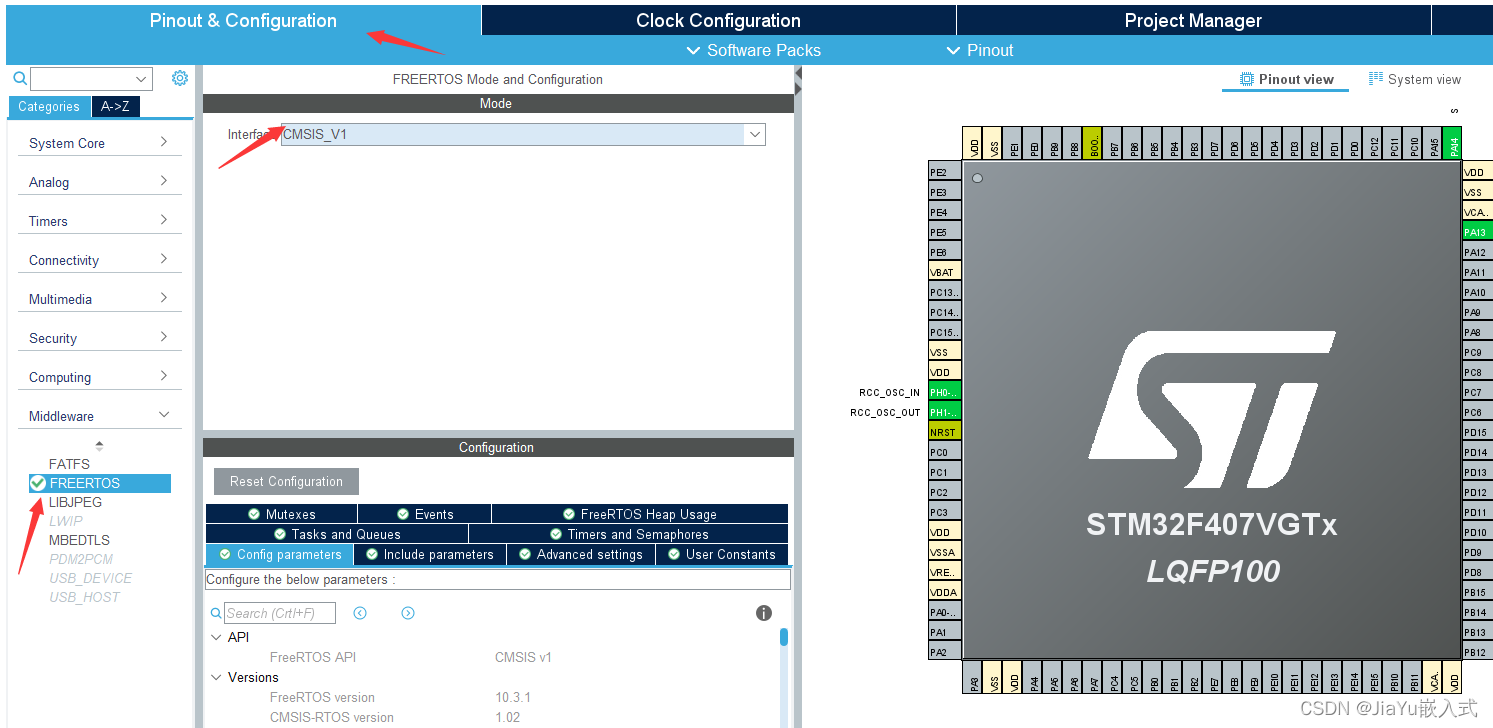
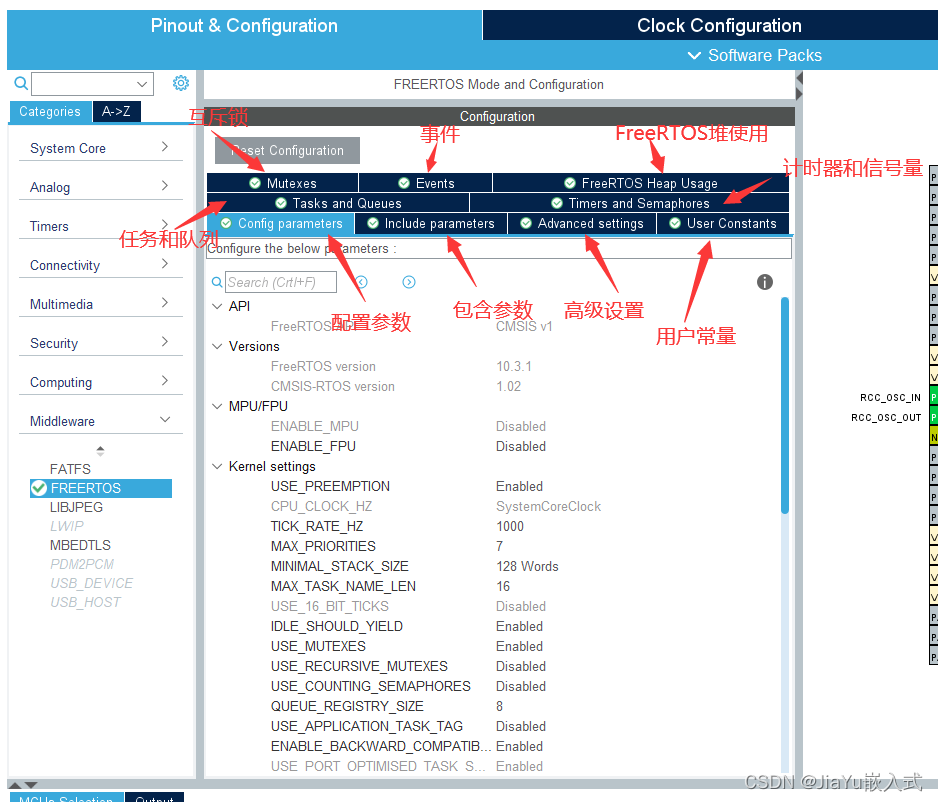
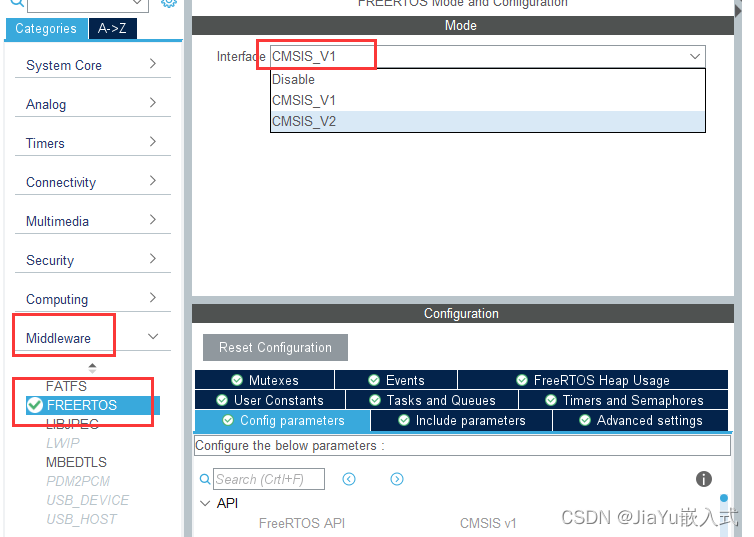
配置FreeRTOS:在"Middleware"选项卡中,选择"FreeRTOS"并启用它。可以选择配置FreeRTOS的堆栈大小、任务优先级等参数。
-
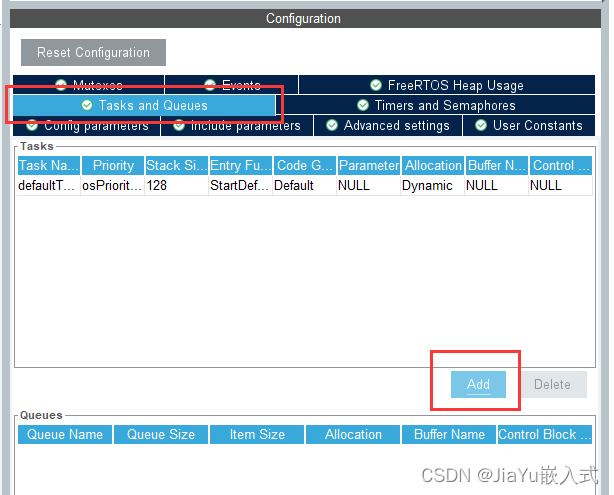
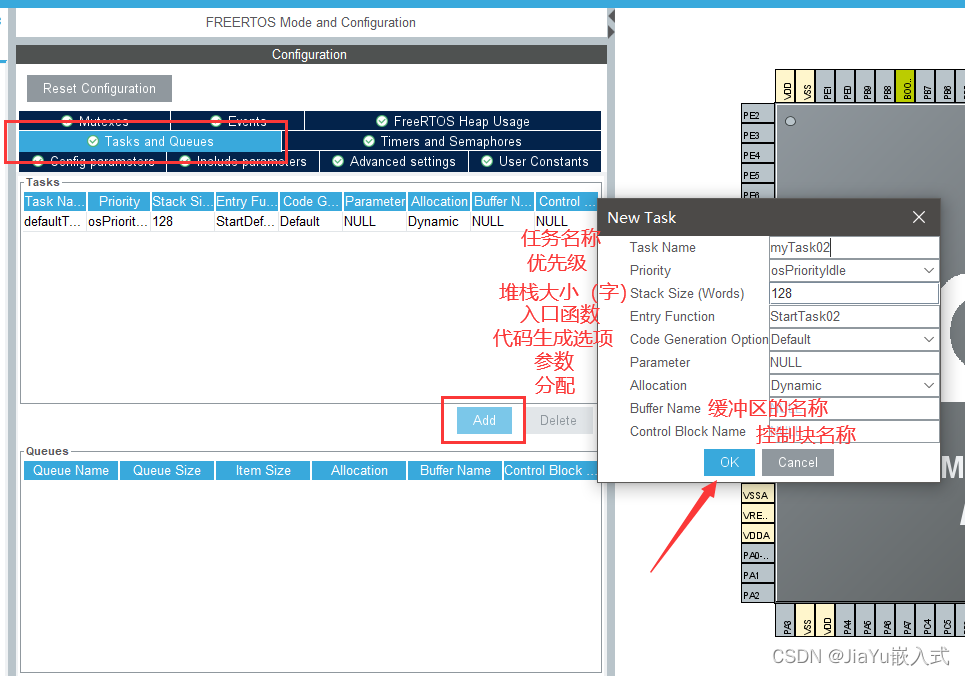
添加任务:在FreeRTOS配置后,可以在"Tasks"选项卡中添加任务。点击"Add Task"按钮,输入任务的名称、栈大小、优先级等信息。
-
配置任务:选择添加的任务后,可以在右侧配置任务的属性。可以指定任务的优先级、堆栈大小和任务的执行函数(任务函数)。
-
生成代码:完成配置后,点击STM32CubeMX工具栏上的"Project"按钮,选择"Generate Code"以生成FreeRTOS集成的STM32项目代码。
-
编写任务函数:根据在STM32CubeMX中配置的任务函数,在生成的代码中找到相应任务的函数,并编写任务的具体实现。
-
编译和烧录:使用喜欢的IDE(STM32CubeIDE、Keil、IAR等)打开生成的代码项目,编译代码并将其烧录到STM32微控制器上。
STM32用FreeRTOS点灯
-
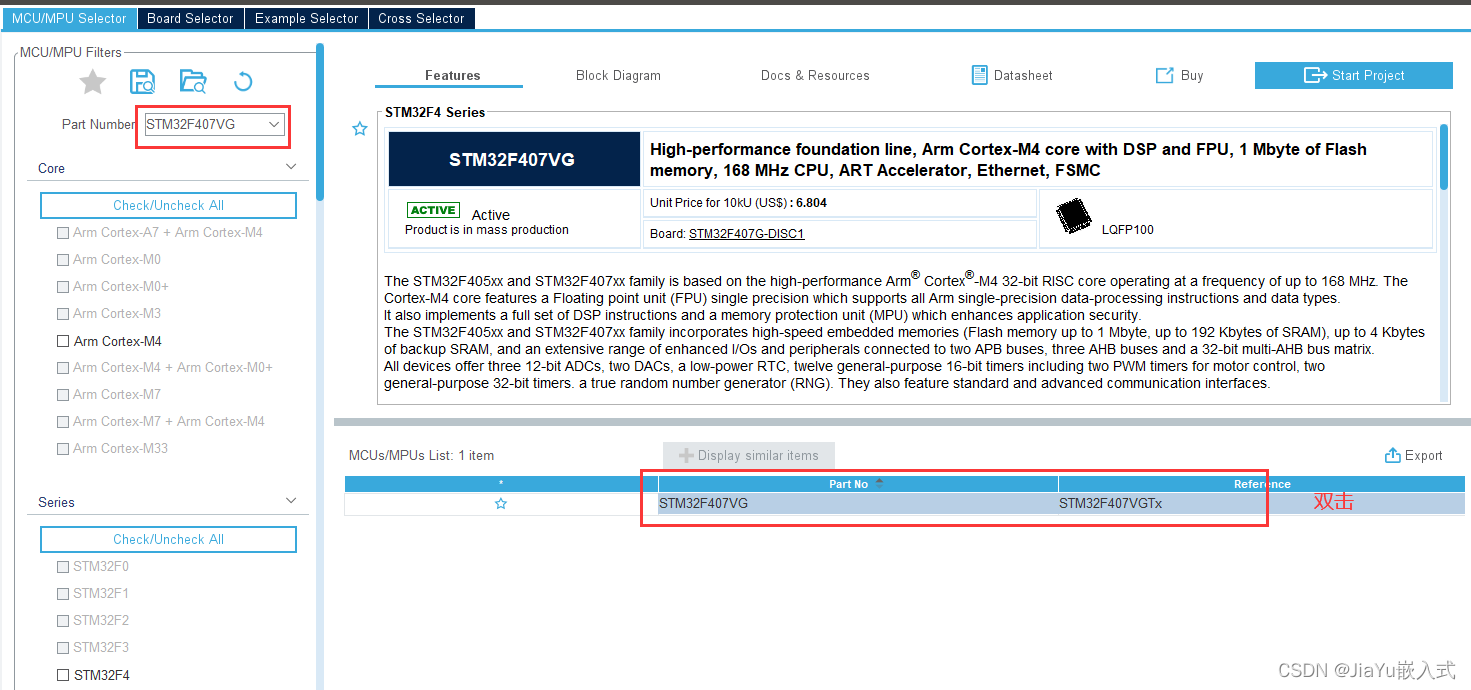
打开STM32CubeMX,并选择STM32F4系列微控制器型号(例如,STM32F407VG)。
-
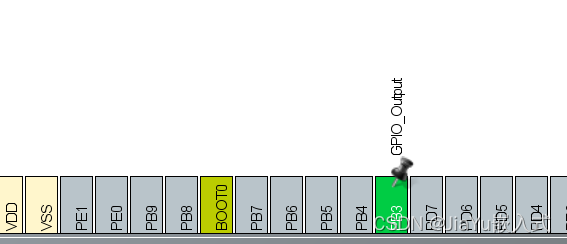
配置系统时钟和GPIO:在"Configuration"选项卡中,配置系统时钟和GPIO引脚,使其用于控制LED。假设我们将LED连接到GPIOB的Pin 3上。
-
配置FreeRTOS:在"Middleware"选项卡中,选择"FreeRTOS"并启用它。可以在"Tasks"选项卡中添加任务,这里添加一个控制LED的任务。
-
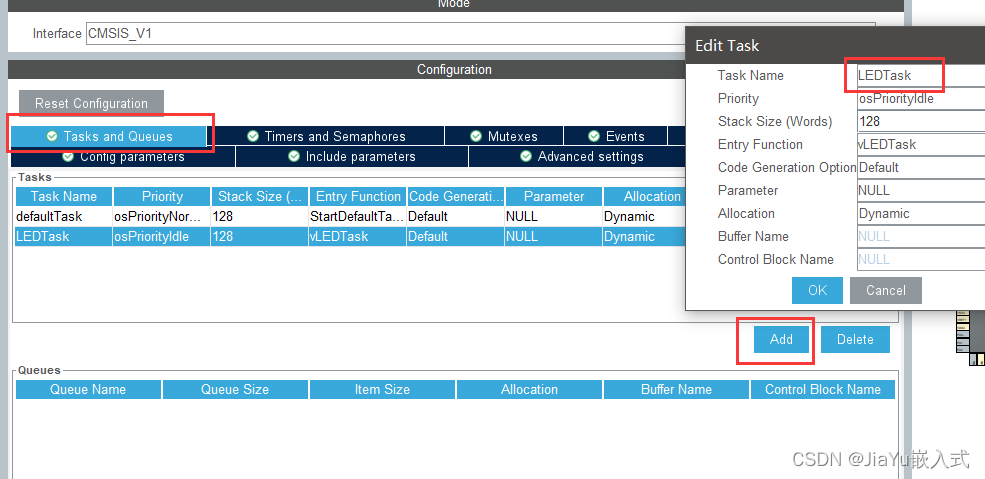
添加任务:在"Tasks"选项卡中,点击"Add Task"按钮。给任务命名为"LEDTask"。
-
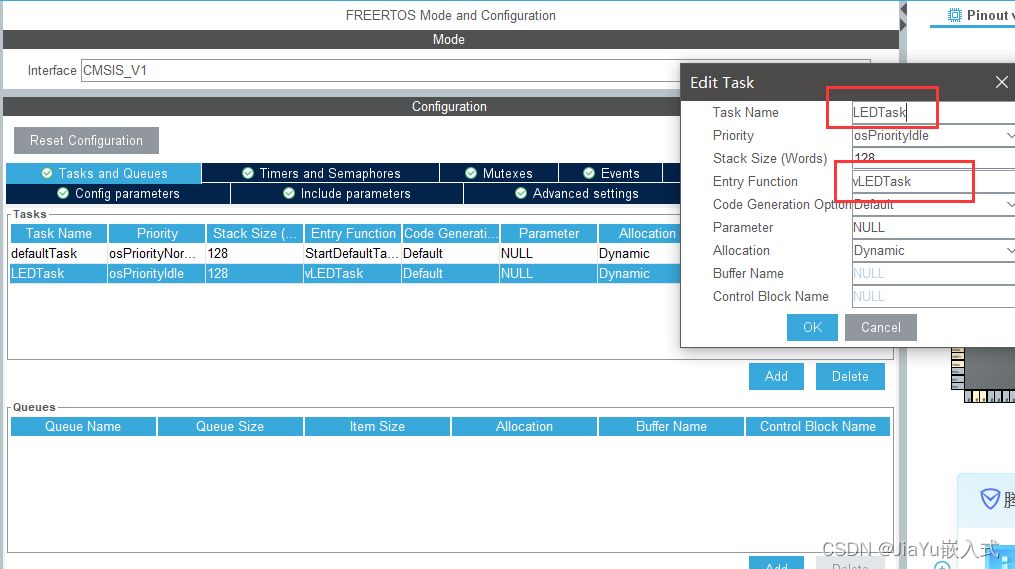
配置任务:在添加的"LEDTask"上点击右键,选择"Open Code Generation",然后在"Task Function"中输入任务的函数名。将任务函数命名为"vLEDTask"。
-
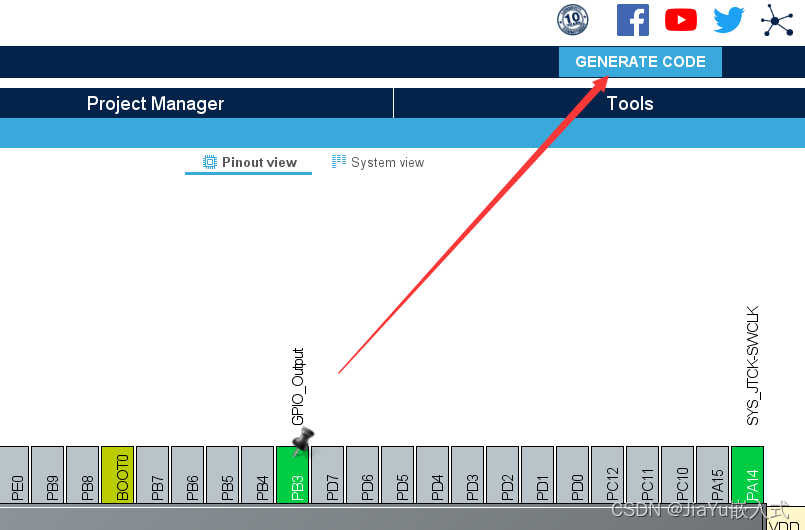
生成代码:点击STM32CubeMX工具栏上的"Project"按钮,选择"Generate Code"以生成代码。
-
编写任务函数:在生成的代码中找到"vLEDTask"函数,并编写任务的具体实现。
代码示例(基于STM32CubeF4 HAL库):
在main.c文件中添加以下代码:
//提示:包含了就不用写
#include "main.h"
#include "cmsis_os.h"
// Function prototypes
void vLEDTask(void *argument);
int main(void)
{
xTaskCreate(vLEDTask, "LEDTask", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
vTaskStartScheduler();
while (1);
}
void vLEDTask(void *argument)
{
for (;;)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_3);
vTaskDelay(pdMS_TO_TICKS(500));
}
}