【FreeRTOS】STM32CubeMX配置STM32FreeRTOS(二)
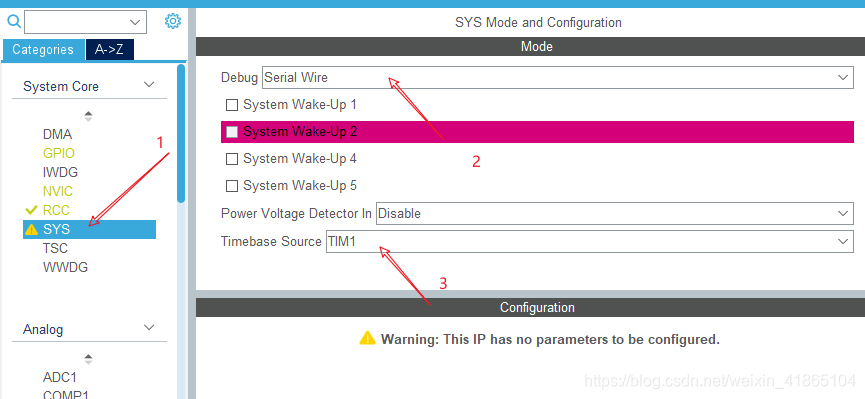
选好芯片后,配置基础时钟源(3),可以自由选择。
因为SysTick被FreeRTOS占用,所以要提供一个时钟源为其它总线使用。(注意:裸机是有时钟源的,默认配置就是SysTick)。
在生成代码之后,可以看到。 对HAL_InitTick()函数重新定义。

裸机与带FreeRTOS的 HAL_InitTick()函数比较。
裸机:
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
HAL_StatusTypeDef status = HAL_OK;
/*Configure the SysTick to have interrupt in 1ms time basis*/
if (HAL_SYSTICK_Config(SystemCoreClock/1000UL) != 0U)
{
status = HAL_ERROR;
}
else
{
/*Configure the SysTick IRQ priority */
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0);
}
/* Return function status */
return status;
}FreeRTOS的:
HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
RCC_ClkInitTypeDef clkconfig;
uint32_t uwTimclock = 0;
uint32_t uwPrescalerValue = 0;
uint32_t pFLatency;
/*Configure the TIM1 IRQ priority */
HAL_NVIC_SetPriority(TIM1_UP_TIM16_IRQn, TickPriority ,0);
/* Enable the TIM1 global Interrupt */
HAL_NVIC_EnableIRQ(TIM1_UP_TIM16_IRQn);
/* Enable TIM1 clock */
__HAL_RCC_TIM1_CLK_ENABLE();
/* Get clock configuration */
HAL_RCC_GetClockConfig(&clkconfig, &pFLatency);
/* Compute TIM1 clock */
uwTimclock = HAL_RCC_GetPCLK2Freq();
/* Compute the prescaler value to have TIM1 counter clock equal to 1MHz */
uwPrescalerValue = (uint32_t) ((uwTimclock / 1000000) - 1);
/* Initialize TIM1 */
htim1.Instance = TIM1;
/* Initialize TIMx peripheral as follow:
+ Period = [(TIM1CLK/1000) - 1]. to have a (1/1000) s time base.
+ Prescaler = (uwTimclock/1000000 - 1) to have a 1MHz counter clock.
+ ClockDivision = 0
+ Counter direction = Up
*/
htim1.Init.Period = (1000000 / 1000) - 1;
htim1.Init.Prescaler = uwPrescalerValue;
htim1.Init.ClockDivision = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
if(HAL_TIM_Base_Init(&htim1) == HAL_OK)
{
/* Start the TIM time Base generation in interrupt mode */
return HAL_TIM_Base_Start_IT(&htim1);
}
/* Return function status */
return HAL_ERROR;
}
如图操作。

添加任务(2)。



添加任务执行代码。
void StartTask02(void const * argument)
{
/* USER CODE BEGIN StartTask02 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
osDelay(1000);
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET);
osDelay(1000);
}
/* USER CODE END StartTask02 */
}
/* USER CODE BEGIN Header_StartTask03 */
/**
* @brief Function implementing the myTask03 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask03 */
void StartTask03(void const * argument)
{
/* USER CODE BEGIN StartTask03 */
/* Infinite loop */
static int i=0;
for(;;)
{
printf("任务运行中 ");
printf("第%d次\n\r",i++);
osDelay(800);
}
/* USER CODE END StartTask03 */
}
默认空闲任务是在,无其它任务执行时,执行。
关于参数,往下看。

tick=1000,任务切换1ms,(最好5ms),避免过度占用资源。
红色箭头,FreeRTOS时钟源。
最大优先级到7,ST官方修改了,如图。

优先级往下依次递增,空闲任务优先级最低。

在system_stm32xx.c文件中
uint32_t SystemCoreClock = 4000000U;FreeRTOSConfig.h文件中
#define configCPU_CLOCK_HZ ( SystemCoreClock )
#define configTICK_RATE_HZ ((TickType_t)1000)