以差速轮式机器人为例,学习URDF机器人建模与xacro优化
1 资源
本文是ROS高效进阶的第二章,我们使用URDF 语言(xml格式)做一个差速轮式机器人模型,并使用URDF的增强版xacro,对机器人模型文件进行二次优化。
差速轮式机器人:两轮差速底盘由两个动力轮位于底盘左右两侧,两轮独立控制速度,通过给定不同速度实现底盘转向控制。一般会配有一到两个辅助支撑的万向轮。
此次建模,不引入算法,只是把机器人模型的样子做出来,所以只使用 rivz 进行可视化显示。
本文参考资料:
(0)两轮差速机器人运动学模型
(1)《ROS机器人开发实践》胡春旭 第5和第6章
(2)ROS探索总结:解读URDF
(3)ROS探索总结:如何从零创建一个机器人模型(机器臂)
(4)ROS高效进阶第一章 – ROS高级组件之 rviz
2 正文
2.1 机器人的定义和构成
(1)机器人定义:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高级灵活性的自动化机器。
目前,自动驾驶汽车也被认为是一种机器人。
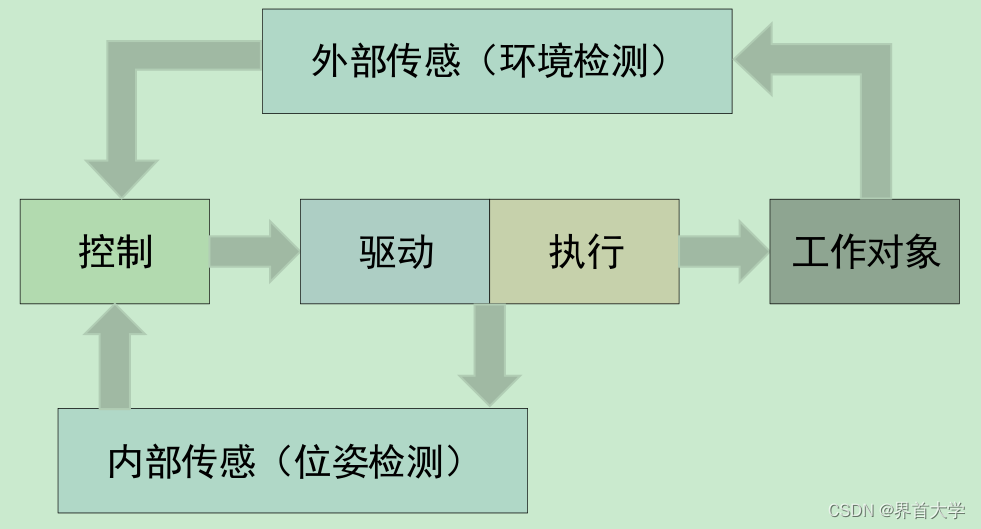
(2)机器人构成:机器人通常分为四大部分,即执行机构,驱动系统,传感系统和控制系统。
以自动驾驶汽车为例,执行机构就是油门,转向和刹车;驱动系统就是电动机;传感系统就是各种传感器:lidar,radar,camera,uss,imu,GNSS;控制系统就是智驾算法系统:感知,定位,规划和控制。
(3)机器人四大部分的控制回路,大致如图:
2.2 URDF建模套路
(1)URDF:Unified Robot Description Format,统一的机器人描述文件格式。urdf 文件使用 xml 格式。
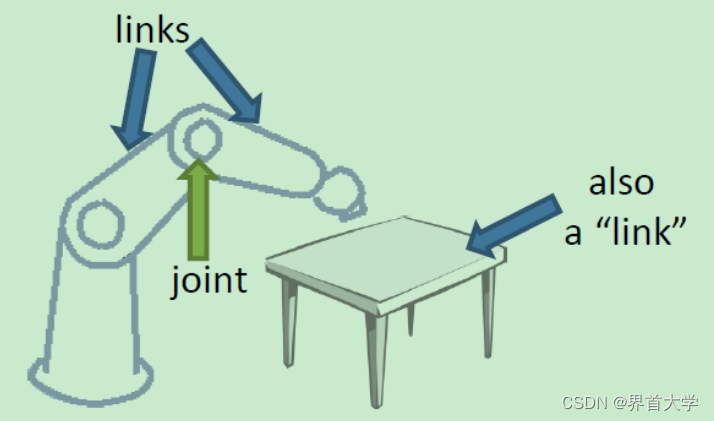
(2)用 urdf 描述机器人,套路如下:每个机器人都是由多个 link(连杆) 和 joint(关节)组成。这里的 link 和joint 很宽泛,形状不一定是杆和轴。比如桌子,桌面和腿都是link,连接处是固定的 joint。
<?xml version="1.0" ?>
<robot name="name of robot">
<link> ... </link>
<joint> ... </joint>
...
</robot>
(3)link:描述机器人某个刚体部分的外观和物理属性。外观包括:尺寸,颜色,形状。物理属性包括:惯性矩阵(inertial matrix)和碰撞参数(collision properties)。在机器人建模中,每个link 都是一个坐标系。
下面是差速轮式机器人底盘的建模,底盘一般称为 base。
<link name="base_link">
// visual 标签就是外观
<visual>
// base_link本身是个坐标系,这也是差速轮式机器人各组成部分的根坐标系,一般会把他的坐标原点设置在rviz的中心处
// origin表示底盘在其base_link坐标系下的原始位置和旋转状态
// xyz表示底盘质心在base_link坐标系的偏移位置,rpy(roll,pitch,yaw)是底盘绕base_link的x,y,z三个轴的旋转值
<origin xyz="0 0 0" rpy="0 0 0"/>
// geometry是物体几何外形
<geometry>
// 这里的底盘,用圆柱体表示,length值为高度,radius是半径值
<cylinder length="0.16" radius="0.2"/>
</geometry>
// material是材料,这里指定底盘颜色为红色,rgba是三色+透明度表示法,三色的范围是0~1,而不是0-255
<material name="red">
<color rgba="1 0 0 1"/>
</material>
</visual>
</link>
补充:这里我们只进行外观建模,因此暂不涉及物理属性配置,下一章在gazebo上仿真时,我们会为样例中的 link 添加物理属性。
(4)joint:描述两个 link 之间的关系,包括运动学和动力学属性,这里暂时只关注运动学属性。通常情况下,两个 link 的关系一般分为六种:
continuous:旋转关节,可以围绕单轴360度无限旋转,比如轮子的轴
revolute:旋转关节,但是有旋转角度的范围限制,比如钟摆
prismatic:滑动关节,也叫活塞关节,沿某一轴线移动的关节,有位置限制,强调一维,比如打气筒
planar:平面关节,允许在平面正交方向上平移或旋转,强调平面,比如抽屉内外滑动
floating:浮动关节,允许进行平移和旋转运动,比如人体的肩关节
fixed:固定关节,比如桌子腿和桌面
下面是差速轮式机器人主动轮与底盘的 joint 样例:
// joint标签就是关节,type表示链接关系
<joint name="left_wheel_joint" type="continuous">
// origin表示轮子在base_link坐标系下的偏移和旋转
<origin xyz="0 0.19 -0.05" rpy="0 0 0" />
// 根link是底盘,子link是轮子
<parent link="base_link" />
<child link="left_wheel_link" />
// axis描述的轮子相对于其自身坐标系的 y 轴旋转,=
<axis xyz="0 1 0" />
</joint>
// 这是轮子link
<link name="left_wheel_link">
<visual>
// 轮子相当于其x轴,旋转90度,也就是立起来
<origin xyz="0 0 0" rpy="1.5707 0 0"/>
<geometry>
<cylinder length="0.06" radius="0.06"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
2.3 使用URDF做一个差速轮式机器人模型
(1)创建 mbot_description 软件包及相关文件
cd ~/catkin_ws/src
catkin_create_pkg mbot_description urdf xacro
cd mbot_description
mkdir -p config doc launch meshes urdf/sensor
touch launch/display_mbot_urdf.launch launch/display_mbot_xacro.launch
touch urdf/mbot_base.urdf urdf/mbot_base.xacro
touch urdf/sensor/camera.xacro urdf/sensor/kinect.xacro urdf/sensor/laser.xacro
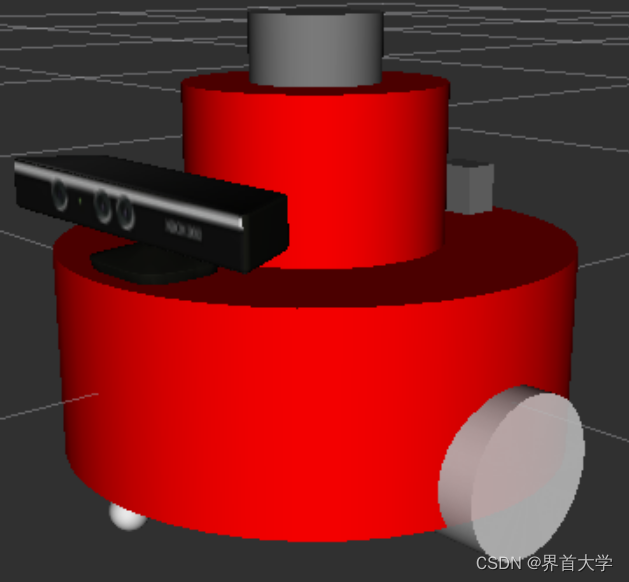
(2)mbot_base.urdf :这是整个mbot建模的文件,包括底盘,两个动力伦,两个万向轮,一个camera,一个kinect(深度相机),一个lidar。具体的语法参考上节的介绍,这里就不再赘述了。
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.16" radius="0.2"/>
</geometry>
<material name="red">
<color rgba="1 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0" />
<parent link="base_link" />
<child link="left_wheel_link" />
<axis xyz="0 1 0" />
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0"/>
<geometry>
<cylinder length="0.06" radius="0.06"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0" />
<parent link="base_link" />
<child link="right_wheel_link" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0"/>
<geometry>
<cylinder length="0.025" radius="0.06" />
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0" />
<parent link="base_link"/>
<child link="front_caster_link" />
<axis xyz="0 1 0" />
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0" />
<parent link="base_link"/>
<child link="back_caster_link" />
<axis xyz="0 1 0" />
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="camera_joint" type="fixed">
<origin xyz="-0.17 0 0.1" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link" />
</joint>
<link name="camera_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
</geometry>
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
</visual>
</link>
<joint name="stage_joint" type="fixed">
<origin xyz="0 0 0.14" rpy="0 0 0" />
<parent link="base_link"/>
<child link="stage_link" />
</joint>
<link name="stage_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.1"/>
</geometry>
<material name="red">
<color rgba="1 0 0 1"/>
</material>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0 0 0.085" rpy="0 0 0" />
<parent link="stage_link"/>
<child link="laser_link" />
</joint>
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
</visual>
</link>
<joint name="kinect_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0" />
<parent link="base_link"/>
<child link="kinect_link" />
</joint>
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708" />
<geometry>
// 使用三维软件导出的模型文件
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link>
</robot>
(3)display_mbot_urdf.launch

<launch>
// 设置ros的全局参数robot_description,指定机器人模型文件
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
// 用这个可以控制机器人关节,但本文的demo没看到这个,有点遗憾
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
// robot_state_publisher结合joint_state_publisher可以实时把机器人各关节和各坐标系关系发布出来,让rviz显示。如果不设置,rviz无法完整加载机器人模型。
// rviz显示后会生成配置文件,保存后再打开,就不用频繁设置了。
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
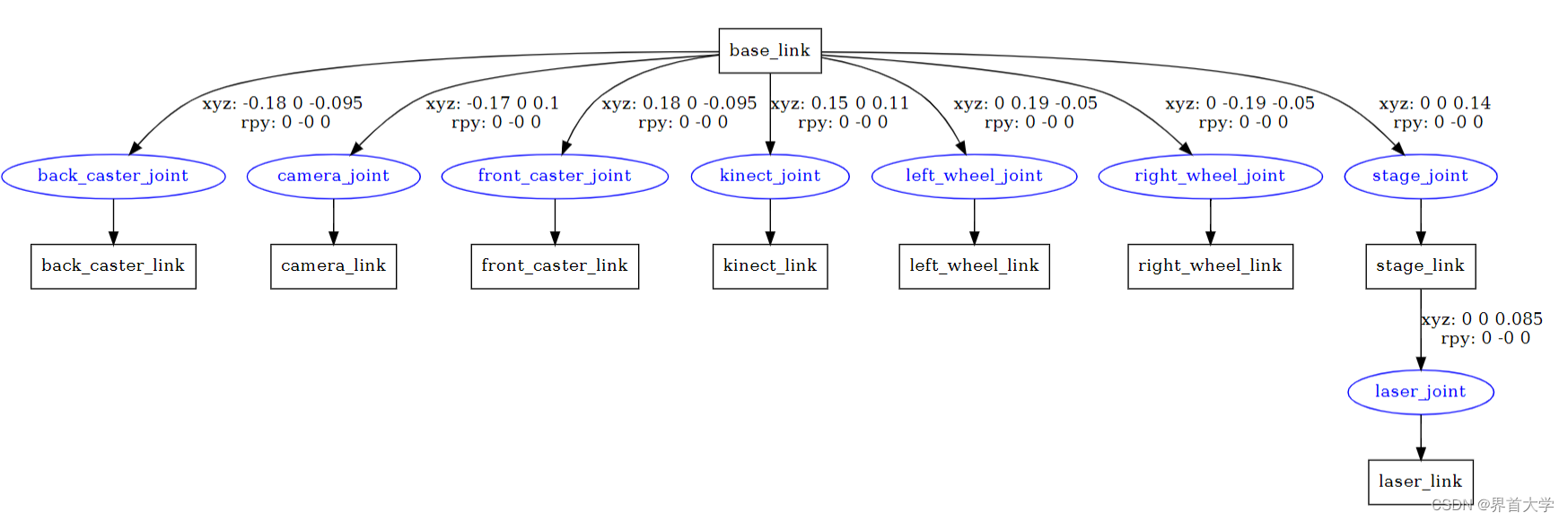
(4)使用 urdf_to_graphiz 命令行工具可以把 urdf 文件的内容,以树的样子dump出来,格式是pdf。使用这个可以快速读取 urdf 的 link 和 joint,下图是上面例子的节点树状图。
cd ~/catkin_ws/
urdf_to_graphiz src/mbot_description/urdf/mbot_base.urdf
(5)编译和运行
cd ~/catkin_ws/
catkin_make --source src/mbot_description
source devel/setup.bash
roslaunch mbot_description display_mbot_urdf.launch
2.4 使用xacro优化差速轮式机器人模型
(1)原始的urdf语法比较简单,导致机器人模型文件比较冗长啰嗦,比如两个动力轮,两个万向轮的编写就非常重复。ROS 提出了xacro语法,让机器人模型文件具有可编程能力,比如设置参数,定义宏函数并调用,文件包含等。下面进行分类举例:
设置并调用参数:
// xacro:property设置参数
<xacro:property name="M_PI" value="3.1415926" />
// 引用参数用${}
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
设置宏函数并调用:
// xacro:macro设置宏函数,名字是wheel,参数是prefix 和 reflect
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="${wheel_joint_x} ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0" />
<parent link="base_link" />
<child link="${prefix}_wheel_link" />
<axis xyz="0 1 0" />
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
<material name="white" />
</visual>
</link>
</xacro:macro>
// 调用wheel宏函数
<xacro:wheel prefix="left" reflect="1"/>
<xacro:wheel prefix="right" reflect="-1"/>
文件包含
// xacro:include是文件包含,camera.xacro里面定义了一个宏函数
<xacro:include filename="$(find mbot_description)/urdf/sensor/camera.xacro" />
// 调用camera.xacro里面的宏函数
<xacro:usb_camera joint_x="${camera_joint_x}" joint_y="${camera_joint_y}" joint_z="${camera_joint_z}"/>
(2)这里的几个文件是对上面的mbot_base.urdf的重写,使用xacro,具体语法看上面的解释。
mbot_base.xacro
<?xml version="1.0" ?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.1415926" />
<xacro:property name="wheel_joint_x" value="0" />
<xacro:property name="wheel_joint_y" value="0.19" />
<xacro:property name="wheel_joint_z" value="0.05" />
<xacro:property name="wheel_length" value="0.06" />
<xacro:property name="wheel_radius" value="0.06" />
<xacro:property name="caster_joint_x" value="0.18" />
<xacro:property name="caster_joint_y" value="0" />
<xacro:property name="caster_joint_z" value="0.095" />
<xacro:property name="caster_radius" value="0.015" />
<xacro:property name="base_length" value="0.16" />
<xacro:property name="base_radius" value="0.2" />
<xacro:property name="stage_length" value="0.12" />
<xacro:property name="stage_radius" value="0.1" />
<xacro:property name="camera_joint_x" value="0.17" />
<xacro:property name="camera_joint_y" value="0" />
<xacro:property name="camera_joint_z" value="0.1" />
<xacro:property name="kinect_joint_x" value="0.15" />
<xacro:property name="kinect_joint_y" value="0" />
<xacro:property name="kinect_joint_z" value="0.11" />
<xacro:property name="laser_joint_x" value="0" />
<xacro:property name="laser_joint_y" value="0" />
<xacro:property name="laser_joint_z" value="0.085" />
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
<material name="red">
<color rgba="1 0 0 1"/>
</material>
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
<xacro:macro name="base_stage">
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="red" />
</visual>
</link>
<joint name="stage_joint" type="fixed">
<origin xyz="0 0 ${(base_length + stage_length)/2}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="stage_link" />
</joint>
<link name="stage_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${stage_length}" radius="${stage_radius}"/>
</geometry>
<material name="red" />
</visual>
</link>
</xacro:macro>
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="${wheel_joint_x} ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0" />
<parent link="base_link" />
<child link="${prefix}_wheel_link" />
<axis xyz="0 1 0" />
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
<material name="white" />
</visual>
</link>
</xacro:macro>
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} ${caster_joint_y} ${-caster_joint_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="${prefix}_caster_link" />
<axis xyz="0 1 0" />
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="white" />
</visual>
</link>
</xacro:macro>
<xacro:base_stage />
<xacro:wheel prefix="left" reflect="1"/>
<xacro:wheel prefix="right" reflect="-1"/>
<xacro:caster prefix="front" reflect="1"/>
<xacro:caster prefix="back" reflect="-1"/>
<xacro:include filename="$(find mbot_description)/urdf/sensor/camera.xacro" />
<xacro:usb_camera joint_x="${camera_joint_x}" joint_y="${camera_joint_y}" joint_z="${camera_joint_z}"/>
<xacro:include filename="$(find mbot_description)/urdf/sensor/kinect.xacro" />
<xacro:kinect joint_x="${kinect_joint_x}" joint_y="${kinect_joint_y}" joint_z="${kinect_joint_z}"/>
<xacro:include filename="$(find mbot_description)/urdf/sensor/laser.xacro" />
<xacro:laser joint_x="${laser_joint_x}" joint_y="${laser_joint_y}" joint_z="${laser_joint_z}"/>
</robot>
camera.xacro
<?xml version="1.0" ?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="usb_camera" params="joint_x joint_y joint_z">
<joint name="camera_joint" type="fixed">
<origin xyz="${-joint_x} ${joint_y} ${joint_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link" />
</joint>
<link name="camera_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
</geometry>
<material name="grey" />
</visual>
</link>
</xacro:macro>
</robot>
kinect.xacro
<?xml version="1.0" ?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="kinect" params="joint_x joint_y joint_z">
<joint name="kinect_joint" type="fixed">
<origin xyz="${joint_x} ${joint_y} ${joint_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="kinect_link" />
</joint>
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708" />
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link>
</xacro:macro>
</robot>
laser.xacro
<?xml version="1.0" ?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="laser" params="joint_x joint_y joint_z">
<joint name="laser_joint" type="fixed">
<origin xyz="${joint_x} ${joint_y} ${joint_z}" rpy="0 0 0" />
<parent link="stage_link"/>
<child link="laser_link" />
</joint>
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="grey"/>
</visual>
</link>
</xacro:macro>
</robot>
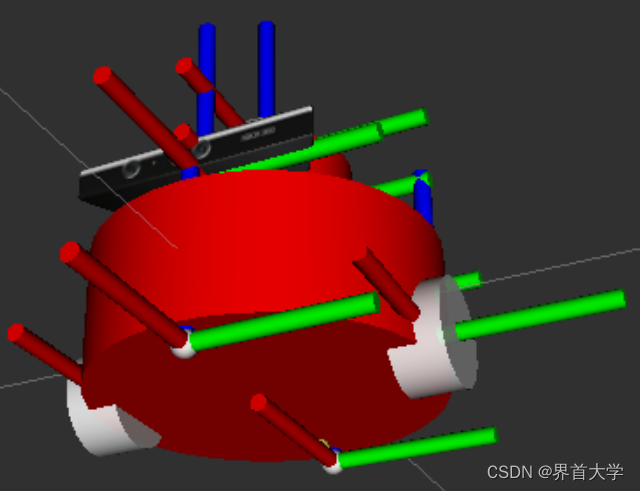
(3)display_mbot_xacro.launch
<launch>
// 引入xacro的解释器,不然无法读取 .xacro文件
<arg name="model" default="$(find xacro)/xacro '$(find mbot_description)/urdf/mbot_base.xacro'" />
<param name="robot_description" command="$(arg model)" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_xacro.rviz" required="true" />
</launch>
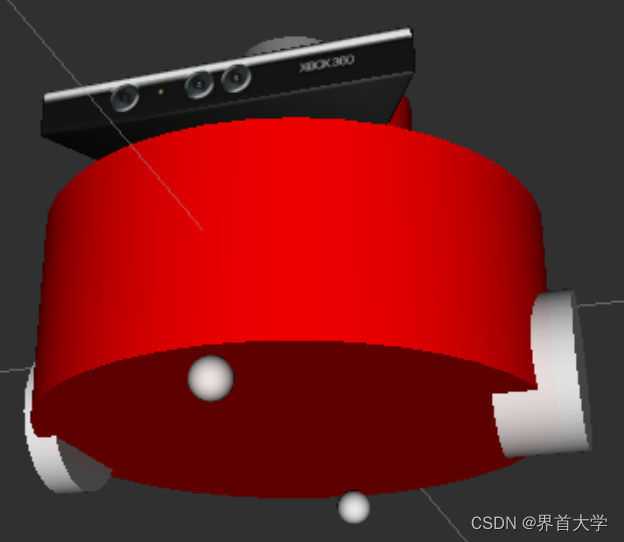
(4)运行效果如下,这里显示了坐标系轴

3 总结
本文的代码托管在本人的github上:mbot_description